

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3.1 Ручной расчет математической модели
Выбираем динамическую модель второго порядка с запаздыванием, так как именно эта модель наиболее адекватно отражает поведение объекта в заданном диапазоне
Для выбранного нами объекта передаточная функция запишется в виде:
![]() (3.1)
(3.1)
где: ![]() коэффициент передачи объекта при 50% номинального режима;
коэффициент передачи объекта при 50% номинального режима;
![]() время запаздывания.
время запаздывания.
![]() постоянная времени объекта;
постоянная времени объекта;
Разложим звено запаздывания в бесконечный ряд, получим:
Результирующая передаточная функция примет вид:

Перемножив объект и звено запаздывания, получим искомую передаточную функцию объекта:
![]()
Приведем это уравнение к нормальной системе методом формального интегрирования.
Данный метод реализуется в следующей последовательности:
1. исходное уравнение n-го порядка приводится к однородному, для чего члены из правой части переносятся в левую и объединяются с производными одинаковых порядков.
2. полученное уравнение формально интегрируется, то есть порядок всех производных понижается на единицу, а члены без производных оказываются под знаком интеграла.
3. обозначаем члены с интегралами дополнительной переменной, производная от которой будет равна подынтегральному выражению.
4. применяем указанную процедуру к оставшемуся дифференциальному уравнению до тех пор пока не получим нормальную систему.
Приведем уравнение к однородному:

Проинтегрируем данное выражение и получим что:

![]()
где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:

В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
 ,
,
Заменив, ![]() на y4 получим что:
на y4 получим что:
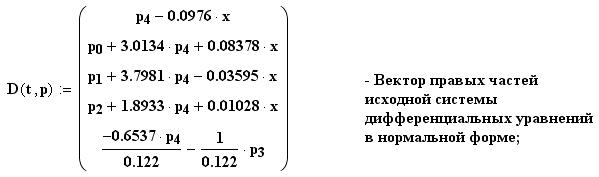
Получили систему нормальных уравнений:
x = yуст/k50% = 1/0.0976 = 10.2459
3.2 Построения математической модели объекта с использованием ЭВМ.
![]()
![]()
![]()
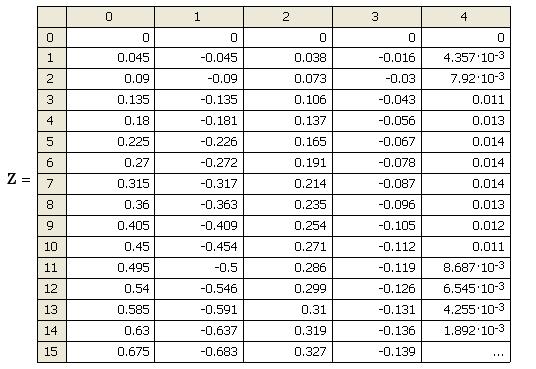
Полученные значения отобразим на графике
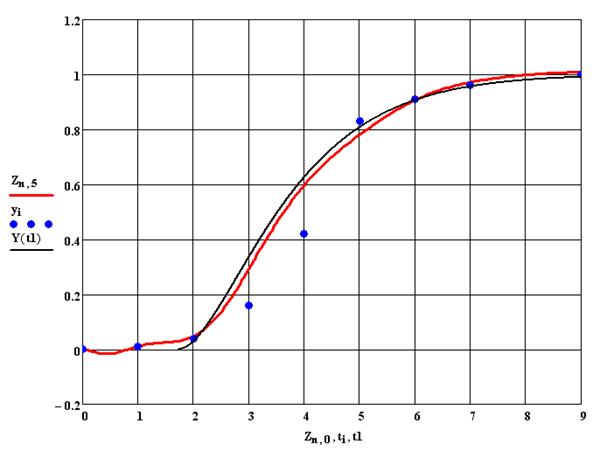
Рисунок 7 – Математическая модель объекта второго порядка с запаздыванием
4 Расчет частотных характеристик объекта
4.1 Постановка задачи
При описании линейных стационарных систем (звеньев) важны частотные характеристики. Частотные характеристики показывают, как ведет себя объект при воздействии на него определенным спектром частот, то есть зависимость изменения амплитуды и фазы проходящего через объект сигнала от частоты сигнала. Они получаются при рассмотрении вынужденных движений системы, при подаче на её вход гармонического воздействия. По передаточной функции построим частотные характеристики: действительную, мнимую, амплитудно-фазовую, амплитудную, логарифмическую амплитудную, фазовую. Для более детального изучения поведения объекта необходимо дополнительно построить расширенные частотные характеристики.
4.2 Ручной расчет частотных характеристик
Данные возьмем из предыдущих разделов, следовательно, коэффициент передачи объекта при 50% номинального режима работы ![]() , постоянная времени объекта
, постоянная времени объекта  , время запаздывания объекта
, время запаздывания объекта ![]() , степень колебательности системы
, степень колебательности системы ![]() .
.
Передаточная функция 2-го порядка с запаздыванием вычисляется по формуле:
 .
.
Для упрощения задачи разложим звено запаздывания по формуле Эйлера. Для этого произведём замену  .
.
Упростим полученную функцию


 .
.
Для расчета амплитудной и частотной характеристик воспользуемся выражением:
 .
.
Логарифмическая амплитудно-частотная характеристика имеет вид:
 .
.
Действительная частотная характеристика имеет вид:
 .
.
Мнимая частотная характеристика записывается как:
 .
.
Пусть![]() , тогда действительная составляющая равна:
, тогда действительная составляющая равна:

Мнимая составляющая ![]() равна:
равна:

Амплитуда колебаний равна:

Фазовая составляющая равна:

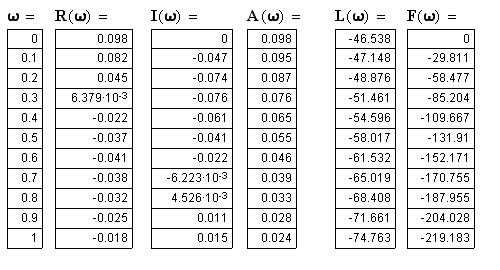
Результаты, полученные при других частотах, сведены в таблицу.
Таблица 11 – Результаты вычислений
Частота ω | Действительная составляющая R(ω) | Мнимая составляющая I(ω) | Амплитуда A(ω) | Логарифмическая АФХ L(ω) | Фаза φ(ω),град |
0 | 0.0976 | 0 | 0.0976 | -46.54 | 0 |
0.1 | 0.08 | -0.05 | 0.095 | -47.15 | -29.8 |
0.2 | 0.045 | -0.074 | 0.087 | -48.88 | -58.48 |
0.5 | -0.0367 | -0.04 | 0.055 | -58.02 | -131.9 |
1 | -0.018 | 0.015 | 0.024 | -74.76 | -219.2 |
Из приведенного примера ясно, как можно построить частотные характеристики. Нанесём полученные значения на координатную сетку.
4.3 Расчет частотных характеристик объекта в системе MathCAD
![]()
![]()
![]()
![]()


![]()
![]()
![]()
![]()
![]()
Результаты расчета представлены в таблице.
Таблица 9 – Результаты расчета
По полученным значениям построим графики следующих характеристик:
· амплитудно-фазовой;
· амплитудно-частотной;
· логарифмической амплитудно-частотной;
· действительной частотной;
· мнимой частотной;
· фазо-частотной.
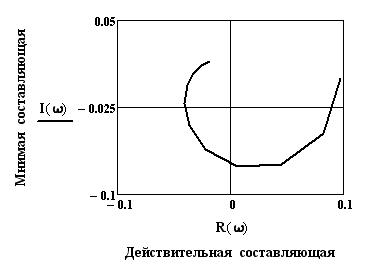
Рисунок 8 – АФХ объекта
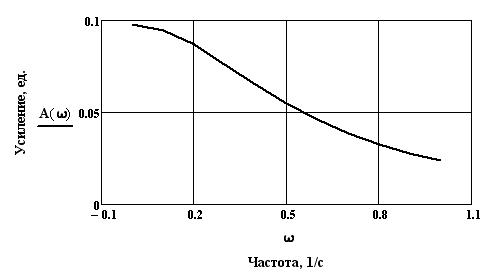
Рисунок 9 – АЧХ объекта
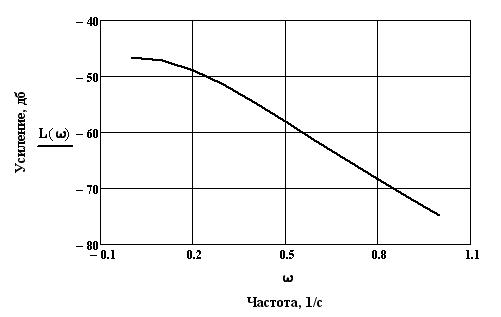
Рисунок 10 – Логарифмическая АЧХ
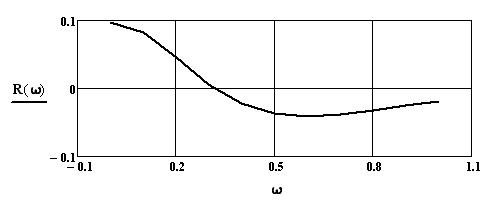
Рисунок 11 – Действительная ЧХ
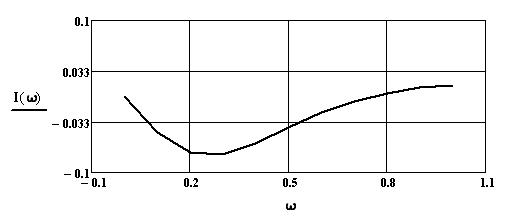
Рисунок 12 – Мнимая ЧХ
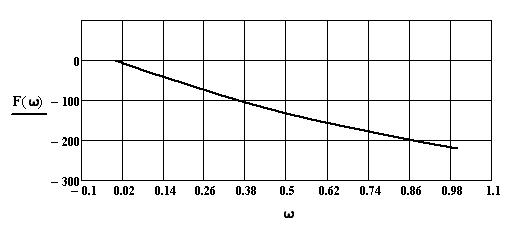
Рисунок 13 – ФЧХ объекта
4.4 Ручной расчет расширенных частотных характеристик
При расчете расширенных частотных характеристик вместо замены ![]() производят замену
производят замену ![]() , где m=0,221 - степень колебательности системы. Также освобождаемся от иррациональности в знаменателе характеристики:
, где m=0,221 - степень колебательности системы. Также освобождаемся от иррациональности в знаменателе характеристики:
 ;
;
Введем обозначение:  ,
,
тогда


Окончательно получим:
- действительная часть:

- мнимая часть:

Далее, аналогично обычным частотным характеристикам, задавшись рядом частот, подаваемых на вход объекта, производим расчет расширенной амплитудно-частотной характеристики по формуле:
 .
.
Для представления величины амплитуды в децибелах, рассчитываем логарифмическую амплитудно-частотную характеристику по формуле:
 .
.
Затем рассчитываем расширенную фазо-частотную характеристику по формуле:
 .
.
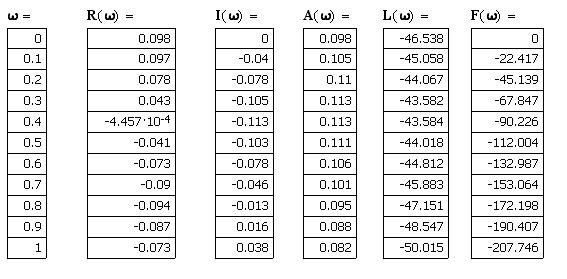
Полученные результаты приведены в таблице
Таблица 12 – Результаты расчета
Ω | R(ω) | I(ω) | A(ω) | L(ω) | Φ(ω) |
0 | 0.078 | 0 | 0.078 | -22.158 | 0 |
0.1 | 0.078 | -0.032 | 0.079 | -22.047 | -0.389 |
0.2 | 0.062 | -0.063 | 0.066 | -23.6 | -0.793 |
0.5 | -0.033 | -0.082 | 0.0397 | -28 | -1.188 |
1 | -0.058 | 0.031 | 0.0589 | -24.59 | -0.491 |
Ниже приведен расчет частотных характеристик объекта на ЭВМ в системе Mathcad.
4.5 Расчёт расширенных частотных характеристик объекта в системе Mathcad
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Результаты расчетов представлены в таблице
Таблица 11 – Результаты расчетов
По полученным данным построим графики.
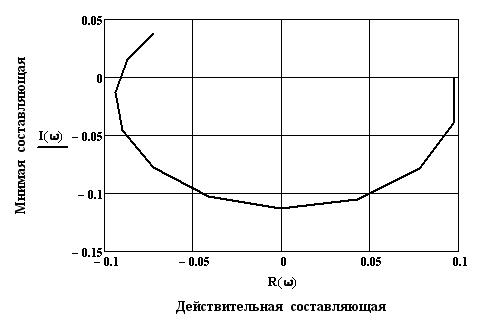
Рисунок 14 –АФХ объекта
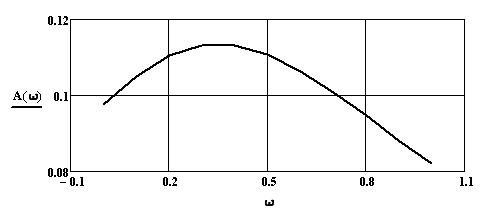
Рисунок 15 – АЧХ объекта
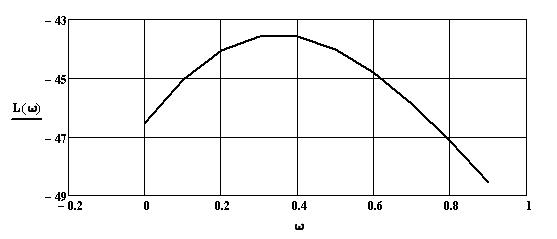
Рисунок 16 – Логарифмическая АЧХ
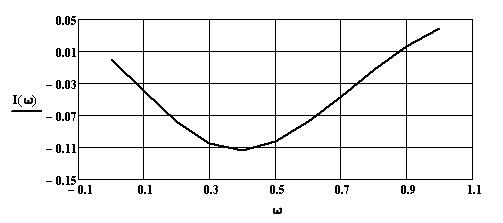
Рисунок 17 – Мнимая ЧХ
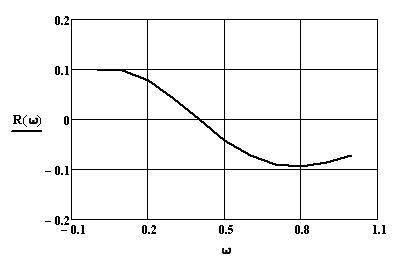
Рисунок 18 – Действительная ЧХ
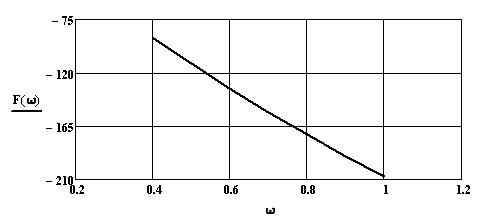
Рисунок 19 – ФЧХ
5 Выбор и расчет параметров настройки регуляторов
Регулятор состоит из элементарных звеньев и включается в цепь обратной связи системы автоматического регулирования. Автоматические регуляторы по своим динамическим свойствам подразделяются: на линейные и нелинейные. При проектировании наиболее часто из линейных регуляторов применяют:
- П - регулятор (пропорциональный регулятор );
- И - регулятор (интегральный регулятор);
- ПИ - регулятор (пропорционально-интегральный регулятор);
- Д - регулятор (дифференциальный регулятор);
- ПД - регулятор (пропорционально-дифференциальный регулятор);
- ПИД - регулятор (пропорционально-интегро-дифференциальный регулятор );
Требования, предъявляемые к регулятору, обусловлены требованиями ко всей системе регулирования. Для обеспечения устойчивости замкнутой системы. при проектировании систем стремятся обеспечивать их устойчивость, так чтобы изменения параметров в некоторых пределах не могло привести к неустойчивости системы. Расчёт параметров настройки регуляторов производится при помощи расширенных частотных характеристик объекта. Расширенные частотные характеристики рассчитываются при подстановке  . Одним из методов расчёта, является критерий Найквиста. Этот частотный критерий устойчивости, разработанный в 1932г. Американским учёным Г. Найквистом, позволяет судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристике. Критерий Найквиста формулируется следующим образом: Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы
. Одним из методов расчёта, является критерий Найквиста. Этот частотный критерий устойчивости, разработанный в 1932г. Американским учёным Г. Найквистом, позволяет судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристике. Критерий Найквиста формулируется следующим образом: Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы ![]() не охватывает точку (-1, j0). В математической форме условия устойчивости системы по критерию Найквиста следующие:
не охватывает точку (-1, j0). В математической форме условия устойчивости системы по критерию Найквиста следующие:
В данной работе рассмотрено несколько регуляторов, при выборе регуляторов необходимо пользоваться рекомендациями. В целом процедуры расчета регулятора следующие:
1) Имея передаточную функцию объекта (любого порядка с запаздыванием или без него) зададимся величиной ![]() , обеспечивающей требуемое качество переходного процесса в замкнутой системе, а также диапазоном и шагом изменения частоты
, обеспечивающей требуемое качество переходного процесса в замкнутой системе, а также диапазоном и шагом изменения частоты ![]() .
.
2) Рассчитаем значения расширенной частотной характеристики объекта и в явном виде определим параметры настройки регулятора в заданном диапазоне частот.
3) Удовлетворяя фазовым соотношениям, находим по полученным графикам и таблицам оптимальные параметры настройки регуляторов.
5.1 Расчет регуляторов
5.1.1 Ручной расчет П – регулятора
Передаточная характеристика имеет вид:
где:  коэффициент передачи при 50%;
коэффициент передачи при 50%;
Т=1.0761 постоянная времени;
 время запаздывания.
время запаздывания.
Заменив в выражении для объекта второго порядка величину![]() на мнимую величину
на мнимую величину ![]() , получим комплексную функцию
, получим комплексную функцию  .
.

где: ![]() степень колебательности;
степень колебательности;
![]() диапазон изменения частоты.
диапазон изменения частоты.




Обозначим в формуле вещественные и мнимые части частотной характеристики:


Подставив ![]() и
и ![]() в уравнение получим:
в уравнение получим:


Найдём значение ![]() для некоторых частот, результаты вычислений сведем в таблицу.
для некоторых частот, результаты вычислений сведем в таблицу.
Таблица 10-Результаты вычислений.
ω | R0 | I0 | Кп |
0 | 0.098 | 0 | 10.204 |
0.1 | 0.119 | -0.031 | 7.869 |
0.2 | 0.126 | -0.073 | 5.942 |
0.5 | 0.048 | -0.039 | 12.549 |
0.75 | 0.03 | 0.0036 | 13.661 |
5.1.1.1 Машинный расчёт П - регулятора
Выбор и расчет параметров настройки регуляторов будем проводить в системе MathCAD.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
