

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (2.9)
(2.9)
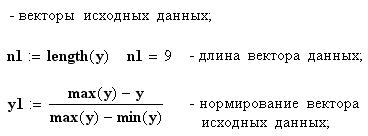
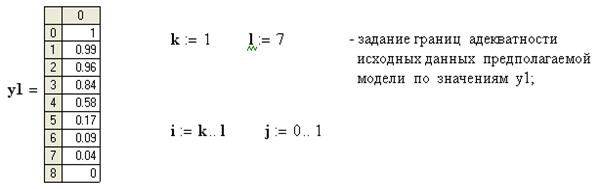
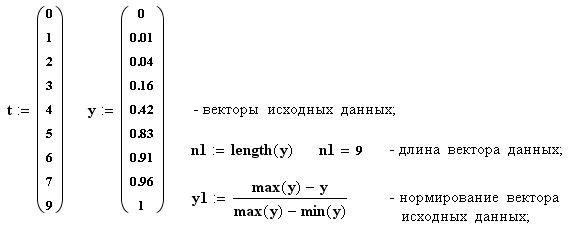
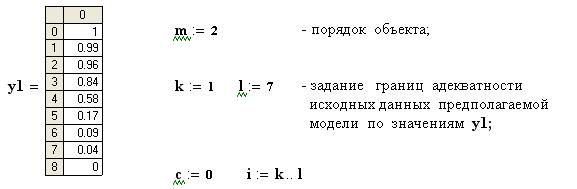
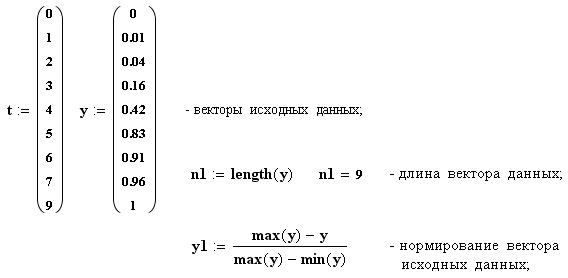
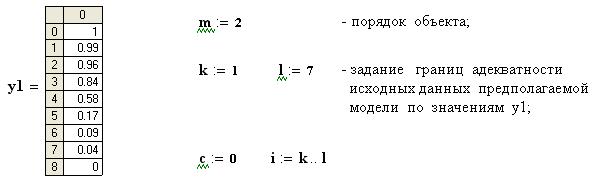
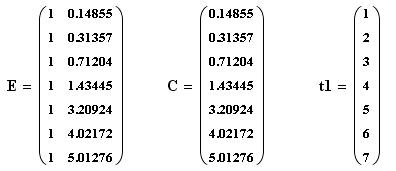
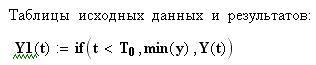
Составим матрицы:
![]()
Транспонируем матрицу L:

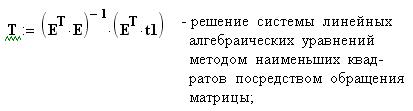
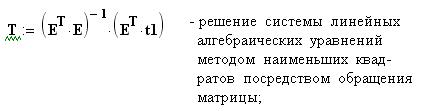
Используя метод наименьших квадратов, решим систему (2.9):
![]()
Находим произведение ![]() :
: ![]()
Находим произведение ![]() :
: ![]()
Находим постоянную времени Т: 
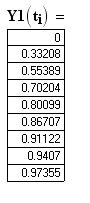
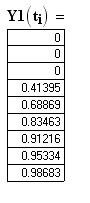
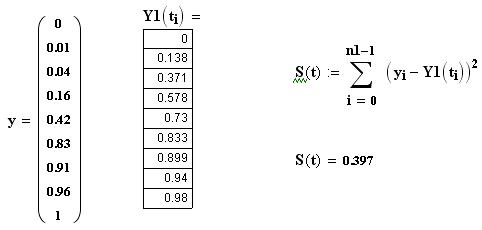
Для оценки полученной постоянной времени вычислим аналитические значения функции по формуле (2.7) и сравним их с экспериментальными данными, а так же найдем ошибку.
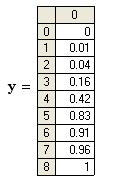
Результаты сведем в таблицу 9.
Таблица 9-Результаты расчета
I | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
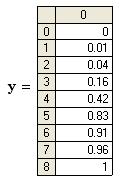
| 0 | 0.01 | 0.04 | 0.1 6 | 0.42 | 0.83 | 0.91 | 0.96 | 1 |
| 0 | 0.545 | 0.93 | 1.2 | 1.4 | 1.5 | 1.6 | 1.69 | 1.77 |
| 0 | 0.535 | 0.89 | 1.04 | 0.98 | 0.67 | 0.69 | 0.73 | 0.77 |
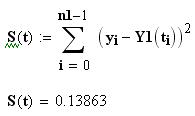
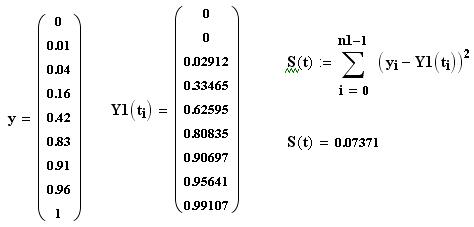
Найдем сумму квадратов отклонений.![]()
![]()
2.2 Ручной расчет коэффициентов для полинома первого порядка с запаздывание
Отличие математической модели с запаздыванием от математической модели без запаздывания выражается во времени запаздывания, τ.
Системой с запаздыванием называется система, в которой имеется звено, обладающее таким свойством, что реакция на его выходе отстает по времени на некоторую величину ![]() .
.
Звено первого порядка с запаздыванием описывается уравнением вида:
Решением дифференциального уравнения (2.10) запишем в виде:
 (2.11)
(2.11)
где: 
Найдем постоянную времени Т и время запаздывания τ методом наименьших квадратов. Преобразуем выражение (2.12).
 (2.12)
(2.12)
 (2.13)
(2.13)
Прологарифмируем выражение (2.14)
 (2.14)
(2.14)
где:  , значение
, значение ![]() смотри в таблице 6.
смотри в таблице 6.
Составим систему алгебраических уравнений первого порядка, причем число уравнений равно числу состояний объекта в эксперименте, кроме точек, ![]() так как в этом значении
так как в этом значении ![]() , а так же точку
, а так же точку ![]() , так как в этой точке
, так как в этой точке ![]() не существует.
не существует.
 (2.15)
(2.15)
Составим матрицы:
![]()
Транспонируем матрицу L:

Используя метод наименьших квадратов, решим систему (2.17):
![]()
Находим произведение ![]()

Находим произведение ![]()
Найдем главный определитель Δ:
![]()
Находим вспомогательные определители: ![]() и
и ![]() подставляя матрицу
подставляя матрицу![]() поочередно в первый и второй столбцы матрицы
поочередно в первый и второй столбцы матрицы![]() соответственно
соответственно
Находим Т и τ:
Для оценки полученных значений вычислим аналитические значения функции, воспользовавшись формулой (2.12) и сравним их с экспериментальными данными. Результаты сведем в таблицу 8.
![]()
При этом: ![]() исключаем из таблицы (
исключаем из таблицы (![]() <
< ![]() ), а также не учитываем при расчете суммы квадратов отклонений.
), а также не учитываем при расчете суммы квадратов отклонений.
Таблица 10 - Результаты расчета
I | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| 0 | 0.01 | 0.04 | 0.16 | 0.42 | 0.83 | 0.91 | 0.96 | 1 |
| 0 | 0 | 0 | 1.758 | 1.793 | 1.813 | 1.824 | 1.831 | 1.837 |
| 0 | 0 | 0 | 1.598 | 1.373 | 0.983 | 0.914 | 0.871 | 0.837 |
Найдем сумму квадратов отклонений. ![]()
2.3 Построение динамической модели объекта с помощью ЭВМ
2.3.1 Модель объекта первого порядка без запаздывания




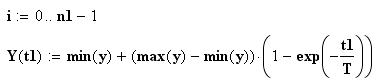
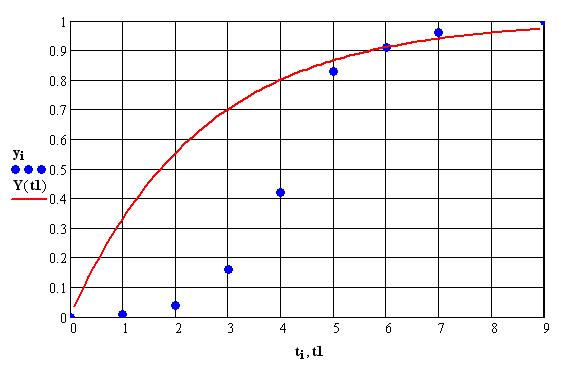
Рисунок 3 – Динамическая характеристика объекта первого порядка без запаздывания
2.3.2 Модель объекта первого порядка c запаздыванием
![]()
![]()
![]()
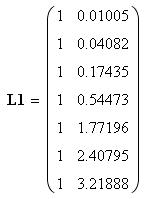




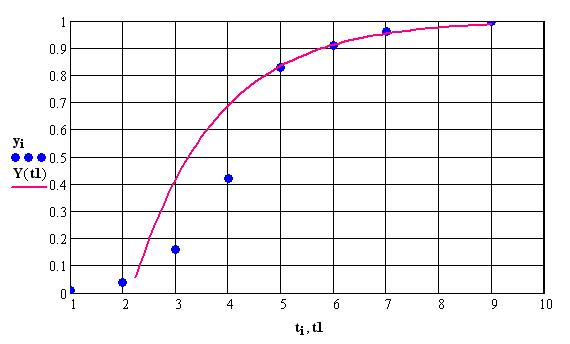
Рисунок 4 – Динамическая характеристика объекта первого порядка с запаздыванием

2.3.3 Модель объекта второго порядка без запаздывания




![]()
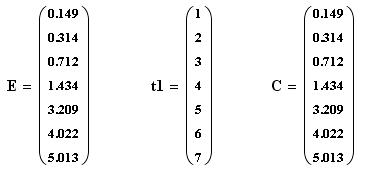
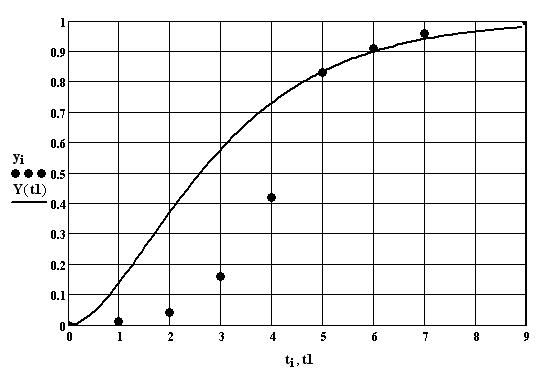
Рисунок 5 – Динамическая характеристика объекта второго порядка без запаздывания

2.3.4 Модель объекта второго порядка с запаздыванием


![]()
![]()


![]()
![]()

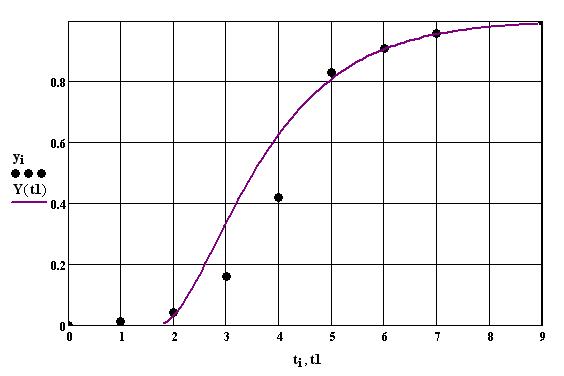
Рисунок 6 – Динамическая характеристика
3 Построение математической модели объекта
Для того чтобы получить математическую модель исследуемого объекта необходимо исследовать поведение объекта в статистических и динамических режимах. Произведя оценку результатов динамических характеристик первого и второго порядков, выбираем модель наиболее адекватно отражающую поведение объекта в заданном диапазоне (сравним суммы квадратов отклонений). Пусть имеем передаточную функцию в виде свернутого степенного полинома, который необходимо представить в обычной форме.
![]() ,
,
где T – постоянная времени; определена при обработке данных;
k – коэффициент передачи объекта.
Звено запаздывания, реально имеющееся в большинстве объектов, оставляет некоторые неудобства при расчетах систем управления. Являясь, в общем случае, нелинейным звеном, его передаточная функция не может быть в исходном виде использована, например, для исследования систем на устойчивость, для построения переходных процессов и т. п. Поэтому часто выбирают приближенное представление передаточной функции этого звена в виде степенного ряда.
Передаточная функция звена запаздывания имеет вид:
![]() ,
,
где ![]() – время запаздывания.
– время запаздывания.
Разложение этой функции в степенной ряд будет иметь вид:
![]() ,
,
Где O(p) - остаток.
Разложение выше третьего порядка не рекомендуются, так как при определенных значениях k,τ,T возникают значительные фазовые искажения, которые могут привести к неустойчивости системы.
Однако на практике требуется разложение в виде отношения полиномов числителя и знаменателя. Тогда:
W(p)=
Перемножив объект и звено запаздывания, получим искомую передаточную функцию:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
