

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Если частоты вращения шпинделя изменяются по геометрическому ряду со знаменателем φ, то передаточные отношения передач в группах образуют геометрический ряд со знаменателем φх, где х – это есть характеристика групповой передачи, которая должна отображать порядок кинематического включения этой группы в общей передаче.
В зависимости от принятого порядка переключений группа передач может быть:
- основной, она является первой в кинематическом порядке включения и переключение ее передач дает ряд последовательных чисел вращения. Характеристика основной группы хо=1, так как ей кинематически предшествует совокупность передач с одной ступенью скорости;
- первой переборной группой, для которой характеристика х1 равна числу передач Р1 в основной группе (х1=Р1), так как этой группе предшествует совокупность передач с Р1 ступенями скорости. Передаточные отношения передач первой переборной группы образуют геометрический ряд с φР1 ;
- второй и последующей переборной группой с характеристикой х, равной произведению чисел передач предшествующих ей групп, т. е. х2=Р1 ×Р2; , х3= Р1 ×Р2 ×Р3,
основной или переборной группой может быть любая группа передач в приводе.
Порядок кинематического включения групп в передаче отражается в структурных формулах в развернутом виде.
Для множительных структур развернутая структурная формула имеет вид:
z = P1(x1) ×P2 (x2) ×P3 (x3) … PК(xК) (27)
где x1,x2, x3 … xК – характеристики групповых передач.
Пример: z = 12 = 3× 2× 2 = 3
z = 12 = 3× 2× 2 = 3
z = 16 = 4× 2× 2 = 4
z = 18 = 3× 2 ×2 = 3
Сложенная структура представляет собой сумму двух или более множительных структур. В этом случае число ступеней скорости привода равно сумме чисел ступеней скорости всех составляющих ее множительных структур. Структурная формула сложенного привода:
z= z1 + z2 + z3 +…+ zk (28)
где z1, z2 , z3 ,…,zk – числа ступеней скорости составляющих структур.
В приводе, состоящем из двух ветвей с числами скоростей соответственно z1 и z2, общее число скоростей коробки со сложенной структурой z= z1 + z2. Обычно у структур z1, z2 и т. д. есть общая часть zо. Тогда:
z1= zо z/
z2= zо z//
z= zо z/ + zо z// = zо (z/ + z//),
если z2 = zо (т. е. z// = 1), то z = zо (1+ z/)
такая группа называется группой с одной дополнительной связью и равна произведению чисел передач, предшествующих ей групп и чисел скоростей основной структуры.
Структура zо называется основной и используется при получении всех ступеней скорости на выходе привода. Характеристики групп основной структуры определяются так же, как и в обычной множительной структуре.
Структуры z/ , z// называются дополнительными и используются каждая для получения только части ступеней скорости на выходе привода. Характеристики групп дополнительных структур определяются как произведение чисел передач, предшествующих ей групп и чисел скоростей основной структуры.
В практике конструирования станков находят применение структуры с одной дополнительной структурой. Эта структура позволяет получить достаточно большой диапазон регулирования.
Структурная формула привода:
z = zo (i1 + z/ i2)
вариант структурной формулы:
![]()

Конструктивные варианты структурных формул приводов для различных чисел ступней скорости z для сложенной структуры могут быть следующие:
z=20=2 × 2(1+2 2) z=28=2 × 2(1+3 2) z=28=2 × 2(1+2 3) z=30=2 ×3(1+2 2) z=30=3 × 2(1+2 2) | z=42=3 × 2(1+3 2) z=42=3 × 2(1+2 3) z=42=2 × 3(1+3 2) z=42=2 × 3(1+2 3) |
3.2.3. построение структурных сеток и кинематической схемы
структурные сетки строятся для того, чтобы в наглядной форме выявить все возможные варианты и выбрать оптимальный вариант структуры кинематических цепей проектируемого привода.
Структурная сетка для выбранного варианта строится в следующем порядке:
- на равных расстояниях проводят горизонтальные линии в количестве на 1 больше, чем число групповых передач; поле между двумя линиями отводится для одной групповой передачи:
- на равных расстояниях проводят столько вертикальных линий, сколько скоростей имеет привод, расстояние между вертикальными линиями равно lgφ , отложенному в произвольном масштабе;
- рядом с полем в порядке конструктивного расположения групп в приводе указывают число передач в группе Pi и ее характеристику Xi ;
- на середине верхней горизонтали намечают точку О , из которой симметрично проводят лучи в количестве, равном Pi. Лучи, изображающие передачи основной группы, расходятся в структурной сетке на величину lgφ; I – переборной на z1 lgφ , II – переборной на z1 z2 lgφ и т. д., где z1 – число лучей в основной группе, z2 – число лучей в I – переборной группе и т. д.;
- из каждых полученных точек на второй и последующих горизонталях аналогично проводят лучи для второй, третьей и т. д. групповых передач.
На рис. 2 показан порядок построения структурной сетки для двенадцатиступенчатой коробки скоростей, имеющей структурную формулу: z=3(1)×2(3)2(6).
Рис.2 Порядок построения структурной сетки.
В сложенных структурах основная и дополнительные структуры являются обычными множительными. Поэтому структурные сетки для них строят также как и для множительных структур. Отличием является только то, что для каждой составляющей структуры сетки строятся отдельно и располагают одну над другой (или) рядом в пределах своего диапазона регулирования.
По структурной сетке можно определить:
- количество ступеней скорости на валах привода;
- количество групповых передач в приводе и порядок их конструктивного расположения;
- характеристики групп, т. е. их место в порядке кинематического включения;
- число передач в каждой группе;
- диапазоны регулирования групповых передач, которые равны φ в степени, равной числу интервалов lgφ , заключенному между крайними лучами, выходящими из одной точки;
- диапазоны регулирования на промежуточных валах Ri=φx .
используя структурную сетку, строят кинематическую схему множительной структуры коробки скоростей (без двигателя и жестких передач).
|
Рис. 3. Кинематическая схема привода и его структурная сетка для Z=12=3(1) × 2(3) × 2(6) |
При разработке кинематической схемы не рекомендуется устанавливать на шпинделе станка три колеса и более, т. к. это вызывает излишней прогиб шпинделя, увеличивает вибрации и отражается на качестве обрабатываемой поверхности. Если на последнем валу необходимо все же установить три и более колеса, то тогда между множительной частью коробки скоростей и шпинделем добавляют последнюю, жесткую, передачу, что позволяет установить на валу шпинделя одно колесо.
3.2.4. Выбор наилучшего варианта структурной сетки
Структурные сетки используют для отсеивания непригодных вариантов по предельно допустимым значениям передаточных отношений для зубчатых передач. при проектировании коробок передач габаритные ограничения (размеры) являются основными. Передаточное отношение внутри групповых передач оказывает влияние на размеры коробки передач. Во избежание чрезмерно больших диаметров колес в коробках передач практикой установлены следующие предельные передаточные отношения:
 - для коробки скоростей;
- для коробки скоростей; ![]() - для коробки подач
- для коробки подач
зная imax и imin определяют Ri – диапазон регулирования передаточных отношений:
 или
или 
где x - характеристика групповой передачи.
Диапазон регулирования последней групповой передачи будет всегда максимальным:
![]() - для коробок скоростей;
- для коробок скоростей;
 - для коробок подач.
- для коробок подач.
Для нормализованных значений φ максимально допустимые значения величины хmax приведены в табл. 2.
Таблица 2. Максимально допустимые значения величины хmax
хmax при φ | |||||||
1,06 | 1,12 | 1,26 | 1,41 | 1,58 | 1,78 | 2 | |
Коробка скоростей | 36 | 18 | 9 | 6 | 4 | 3 | 2 |
Коробка подач | 45 | 23 | 11 | 7 | 5 | 4 | 3 |
Для того, чтобы наибольший диапазон регулирования групповой передачи получился наименьшим, необходимо в качестве последней переборной группы брать группу с наименьшим числом передач. Предпочтение следует отдавать структурным формулам, у которых Р1> Р2> Р3 >…>Рk
Числовая характеристика (величина х) должна последовательно возрастать от первого вала ко второму и т. д.
хо< х1< х2< х3<…< хk
Необходимо стремиться к тому, чтобы все промежуточные валы были по возможности более быстроходными, с максимальной редукцией на последней паре валов. Это позволит получить более компактную, легкую и быстроходную конструкцию.
Наилучшим вариантом привода со сложенной структурой будет являться привод, который при одинаковых числах ступеней скоростей имеет:
- большее количество ступеней, получаемых через короткие кинематические цепи;
- наименьшее количество деталей (зубчатых колес, валов, муфт и т. д.);
- меньшие диапазоны регулирования групп передач.
3.2.5 Построение графика чисел оборотов, определение передаточных отношений и чисел зубьев
График чисел оборотов строят в следующем порядке:
1. На равных расстояниях проводят столько горизонтальных линий, сколько валов в проектируемой коробке.
2. На равных расстояниях проводят вертикальные линии и присваивают им слева - направо порядковые числа оборотов, начиная с n1 .
3. На верхней горизонтальной линии проставляется точка числа оборотов электродвигателя.
4. На последнем вале (нижней горизонтальной линии) проставляются точки чисел оборотов и проводятся линии вверх до следующего вала по аналогии со структурной сеткой, руководствуясь вышеописанными правилами.
При построении необходимо иметь в виду, что линии, соединяющие точки двух валов, обозначают передачу между ними с передаточными отношениями:
i=φm
где m – число интервалов lgφ, перекрываемых лучом. Если луч отклоняется влево, то передача понижающая и m<0 , если вправо – то повышающая и m>0, для вертикального луча m=0.
При разработке кинематической схемы необходимо иметь в виду следующее:
1. График частот вращения необходимо строить так, чтобы передаточные отношения были в допустимых пределах (см. П. 3.2.4);
2. Желательно, чтобы выполнялись условия
Р1> Р2> Р3 >…, хо< х1< х2< х3<…
3. Лучше, если требуемое число ступеней частот вращения получается при меньшем числе групповых передач, т. к. в этом случае уменьшается число валов, а следовательно и подшипников и отверстий в корпусе.
4. Надо стремиться уменьшать номенклатуру колес, используемых в коробке, что дает значительный экономический эффект. Это достигается симметричным расположением лучей в поле одной группы и применением одинаковых лучей (т. е. с одинаковыми передаточными отношениями) в различных группах передач.
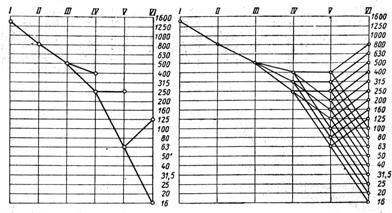
На рис 4. показаны варианты структурных сеток для 16-ти скоростной коробки скоростей и примеры реализации одной из структурных сеток в виде графиков частот вращения.
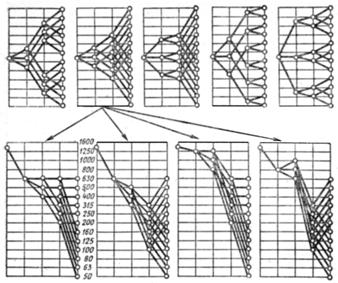
Рис. 4. Примеры структурных сеток и графиков частот вращения. На рис. 5 показан порядок построения графика частот вращения для 18-ти скоростной коробки. |
|
Рис. 5. Порядок построения графика частот вращения. |
3.2.6. Определение чисел зубьев шестерен
Для удобства расчетов передаточные отношения выбирают равными или кратными значениям стандартных знаменателей i=φn , где n- целое число.
При определении чисел зубьев необходимо не только получить данное передаточное отношение, но и обеспечить постоянную сумму зубьев в пределах двухваловой передачи:
 ,
, 
решая систему уравнений:
|

получим:
![]()
![]()
![]()
По этим формулам, задаваясь Sz и зная необходимым значения i, можно определить числа зубьев шестерен. Однако во многих случаях трудно сразу получить удовлетворительные решения. Так как передаточные числа являются дробными числами и поэтому z1 и z2 также получаются дробными. При округлении их до целых чисел получим отклонения от заданных значений i, которые могут выйти за допустимые пределы. Кроме того, минимальное число зубьев силовых шестерен коробок скоростей обычно должно быть не ниже zmin=18 ¸ 20.
Для облегчения расчетов в приложении приведена табл. 4, где по горизонтали отложена сумма зубьев, а по вертикали – передаточные отношения, кратные 1,06. Пустые клетки означают, что при данном значении S z передаточное отношение не может быть выдержано в требуемых пределах ±10(j - 1)%, в остальных клетках указано число зубьев меньшего зубчатого колеса.
Пример: Определить числа зубьев трех пар шестерен, которые должны обеспечивать передаточные отношения i1=1; i2=1,26 и i3=1,58; zmin=18.
Если по таблицам взять, например Sz=49, то при i3=1,58 z1/z2=(49 – 19)/19=30/19, а при i2=1,26 и i1=1 имеем пустые клетки. Следовательно, надо найти такое значение Sz, которое удовлетворяет трем передаточным отношениям.
Приемлемое решение будет при Sz = 52; i1=26/26=1; i2=29/23=1,26; i2=32/20=1,58. Здесь точное значение i3=1,6 отличается от требуемого i=1,58 всего на 1,25%, что допустимо.
3.2.7. Рекомендации по проектированию кинематической схемы коробки скоростей
В коробках скоростей металлорежущих станков широкое применение получили механизмы, состоящие из передвижных многовенцовых блоков зубчатых колес (рис. 6). Число колес в блоке чаще всего два, три и, реже, четыре. Блоки применяют в качестве ведущих и ведомых элементов. Если применить корригированное зацепление с разной суммой зубьев при одном межцентровом расстоянии, то в отдельных случаях двухвенцовый блок (рис. 6,а) может быть заменен одним колесом z1-13 (рис. 6,б), зацепляющимся поочередно с колесами z2 и z4 .
На рис. 6, в показан механизм с трехвенцовым блоком зубчатых колес. Для ввода в зацепление колес z1 и z2 необходимо, чтобы блок беспрепятственно перемещался мимо колеса z6, не зацепив за него колесом z3. Это возможно, если z5 - z3>5. Если эта разность меньше 5, то используют конструкцию, показанную на рис. 6, г. Все сказанное относится к соседним зубчатым колесам четырехвенцового блока (рис. 6, д).
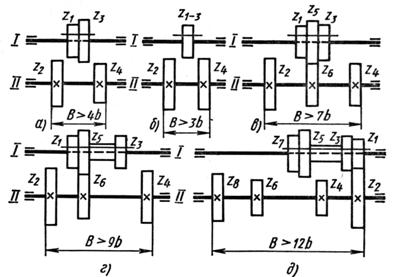
Рис. 6 Множительные механизмы с многовенцовыми блоками зубчатых колес.
Основное достоинство механизмов с передвижными блоками - их простота. Колеса, не участвующие в передаче рабочих нагрузок, не изнашиваются. К недостаткам следует отнести невозможность переключения на ходу и сравнительно большие размеры. Этих недостатков лишены механизмы, у которых зубчатые колеса находятся в постоянном зацеплении (рис. 7, а). Колеса z2 и z4 на вал II насажены свободно и включаются в работу муфтой. Если муфта фрикционного типа, то частоту вращения можно изменять на ходу. Передачи могут быть косозубыми. На рис.7, б показан элементарный механизм с двумя электромагнитными муфтами. Эти муфты получили широкое распространение, позволяя простыми средствами автоматизировать привод.
|
|
а) б) | в) |
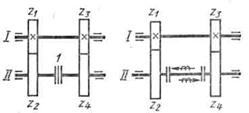
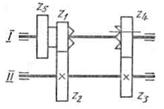
Рис. 7. Множительные механизмы:
а, б – множительные механизм с муфтами; в - множительный механизм с перебором.
На рис. 7, в показан множительный механизм с перебором. Вращение колеса z1, осуществляемое колесом z5, может быть передано валу I через перебор, по цепи колес z1-z2, z3-z4 и непосредственно, если переместить колесо z4 влево, до сцепления торцовых кулачков полумуфт. Вал II, колеса z2 и z3 называют переборными. При непосредственной передаче вращения валу I с z1, колесо z2 остается зацепленным, что снижает общий к. п.д. привода.
При конструировании коробок скоростей стремятся упростить конструкцию и сделать ее более компактной за счет уменьшения числа ступеней, ограничения передаточного числа, в каждой передаче, которое для повышающей передачи выбирается, как правило, не более 2, а понижающей — не менее 1/4. На рис.8 приведены некоторые способы совершенствования коробки скоростей [3].
Уменьшение осевых размеров достигается (рис.8):
а) рациональным расположением колес в подвижных блоках 1 и 2 (см. схемы 1—2; 3—4);
б) применением «связанных» колес 1 (схемы 5 и 6), при которых осевые размеры сокращаются на величину ширины колеса (см. схемы 3 и 4);
в) заменой тройного блока (схема 7) двойным блоком и перемещаемым отдельно колесом {схема 8) (иногда используют схему с тремя автономно перемещаемыми колесами взамен тройного блока);
г) использованием зубчатых муфт 1 и 2 (схемы 9 и 10) или при средних частотах вращения электромагнитных муфт 1 и 2 (рис. 3.1).
Уменьшение радиальных размеров коробок скоростей осуществляют
а) заменой трехваловой коробки двухваловой (схема 11);
б) рациональным распределением передаточных отношений между несколькими парами колес (схема 12). Например, общее передаточное отношение в показанном на схеме 12 положении распределено между колесами 1—2, 3—4. Если большое передаточное отношение реализовывать в одной паре колес, то размеры коробки скоростей возрастают;
в) применением параллельно работающих передач (схема 13), благодаря чему мощность передается по параллельным потокам и размеры коробки скоростей существенно уменьшаются.
г) соосной установкой валов (схема 14).
д) применением планетарных передач (схема 15), благодаря чему можно обеспечить большое передаточное число u>5 при сравнительной компактной конструкции коробки скоростей.
Другие улучшения коробок скоростей направлены:
а) на отключение неработающих передач. Например, в, схеме 16 при переключении блока 1 вправо включается повышающая передача z2—z1, в результате чего может возникать повышенный шум. В схеме 17 прямое соединение входного и выходного валов происходит при перемещении колес 1 и 2 и отключении колес вала 3;
б) на блокировку муфт 1 и 2 переключения (схема 18) (в этом случае исключается необходимость электрической блокировки от неправильного включения муфт и упрощается механизм переключения скоростей);
в) на рациональное размещение проточек под вилку переключений (схема 19) для сокращения осевых размеров L. (Если проточки (величиной С»b) расположить на обоих блоках 1 и 2 ближе к опорам (как на блоке 1), то размер коробки L для показанной схемы будет больше примерно на величину b, чем в схеме 19);
г) на использование шкивов (схема 20).
Часто ременную передачу от двигателя к шпинделю можно использовать для упрощения коробки скоростей и передачи максимальных частот вращения, минуя зубчатые колеса.
| Рис.8. Совершенствование кинематических схем коробок скоростей. |
|


4. Содержание отчета
Исходные данные к выполнению самостоятельной работы.
1. Определение основных технических характеристик станка.
1.1 Определение скорости резания и предельных частот вращения шпинделя.
1.2 Определение диапазона регулирования частот вращения шпинделя, числа ступеней частот вращения, выбор знаменателя геометрического ряда и обоснование выбора, определение промежуточных чисел оборотов.
1.3 Определение мощности привода главного движения и выбор электродвигателя.
1. Кинематический расчет привода станка.
2.1 Определение числа конструктивных и кинематических вариантов привода. Построение структурных формул, в общем, и развернутом виде.
2.2 Выбор и обоснование конструктивного варианта коробки скоростей.
2.3 Построение всех возможных структурных сеток для выбранного конструктивного варианта. Обоснование и выбор наилучшего варианта структурной сетки.
2.4 Построение первого варианта кинематической схемы.
2.5 Построение графика чисел оборотов, определение передаточных отношений и чисел зубьев колес.
2.6 Построение окончательного варианта кинематической схемы.
Приложения
Таблица 3. Исходные данные к выполнению самостоятельной работы.
№ п/п варианта | Обрабатываемый материал | Материал режущей части инструмента | Максимальный и минимальный диаметры обработки* |
1 | Ст. 3 | Р6М5 | 100/25 |
2 | Сталь 20 | Т15К6 | 105/25 |
3 | Ст. 4 | ВК8 | 95/25 |
4 | Сталь 30 | Р6М5 | 90/25 |
5 | Ст. 5 | Т15К6 | 85/20 |
6 | Сталь 40 | Р6М5 | 80/20 |
7 | 15Х | Т15К6 | 75/20 |
8 | Сталь 50 | ВК6 | 70/20 |
9 | 20Х | Р6М5 | 65/15 |
10 | 12ХНЗ | Т15К6 | 60/15 |
11 | 25Н | Р6М5 | 55/15 |
12 | 40Г | Т15К6 | 50/12 |
13 | 35ХМА | ВК8 | 2000 |
14 | Сталь 10 | ВК6 | 1600 |
15 | 38 ХА | Р6М5 | 1250 |
16 | А15Г | Т15К6 | 1000 |
17 | У8 | Р9 | 800 |
18 | 25 | Р18 | 630 |
19 | Ст. 6 | Р6М5 | 500 |
20 | У7 | Т15К6 | 400 |
21 | А12 | ВК6 | 250 |
22 | Ст. 2 | Р6М5 | 200 |
23 | 15ХА | Т15К6 | 160 |
24 | 25Нз | Р6М5 | 130 |
25 | 20ХГ | Р6М5 | 125 |
26 | Ст. 3 | Р6М5 | 75/5 |
27 | Сталь 20 | Т15К6 | 155/25 |
28 | Ст. 4 | ВК8 | 135/25 |
29 | Сталь 30 | Р6М5 | 120/25 |
30 | Ст. 5 | Т15К6 | 85/20 |
*Примечание: Для станков сверлильно-расточной группы Dmax/Dmin, для токарного станка указывается только максимальный диаметр. |
Приложение Б

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
