

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
КАФЕДРА «ТЕХНОЛОГИЯ МАШИНОСТРОЕНИЯ»
ОПРЕДЕЛЕНИЕ ТЕХНИЧЕСКОЙ ХАРАКТЕРИСТИКИ И
КИНЕМАТИЧЕСКИЙ РАСЧЕТ КОРОБКИ СКОРОСТЕЙ
МЕТАЛЛОРЕЖУЩЕГО СТАНКА
Методические указания к самостоятельной работе
по дисциплине «Металлорежущие станки»
РПК «Политехник»
Волгоград
2007
УДК 6
О – 62
Определение технической характеристики и кинематический расчет коробки скоростей металлорежущего станка: Методические указания к самостоятельной работе по дисциплине «Металлорежущие станки» / Сост. ; Волгоград. гос. техн. ун-т. – Волгоград, 2007. – 35 с.
Рассматриваются содержание и порядок определения технической характеристики и расчета коробки скоростей металлорежущего станка.
Предназначены для студентов направления 150900 «Технология, оборудование и автоматизация машиностроительного производства».
Ил. 8. Табл. 5. Библиогр.: 8 назв.
Рецензент:
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
ã Волгоградский
государственный
 технический
технический
университет, 2007
1. Цель работы
Целью работы является приобретение студентами практических навыков в проектировании кинематической схемы привода металлорежущего станка и построении графика чисел оборотов.
2. Содержание работы
2.1. Используя литературу [1,4,5], конспект лекций и данные методические указания ознакомиться с порядком и содержанием кинематического расчета и проектирования коробок передач.
2.2. По исходным данным определить техническую характеристику проектируемой коробки передач: определить скорость резания и предельные частоты вращения шпинделя; определить диапазон регулирования частот вращения шпинделя, число ступеней частот вращения, произвести выбор знаменателя геометрического ряда и определить промежуточные числа оборотов.
2.3. Определить мощность привода и подобрать электродвигатель.
2.4. Провести кинематический расчет привода станка: определить число конструктивных и кинематических вариантов привода; построить структурные формулы, в общем, и развернутом виде; построить структурные сетки и кинематическую схему коробки передач; обоснованно выбрать наилучший вариант структурной сетки; построить график чисел оборотов, определить передаточные отношения и числа зубьев колес.
3. Общие положения
3.1. Методика определения основных технических характеристик станков
К основным техническим характеристикам станка, определяющим его производственные возможности, относятся:
1. Предельные частоты вращения шпинделя n тaх и n min.
2. Промежуточные частоты вращения шпинделя между n тaх и n min.
3. Предельные подачи S mак и S тin .
4. Промежуточные значения подач между S mox и S min.
5. Мощность электродвигателя привода главного движения.
Исходными данными к расчету основных технических характеристик станка являются:
- марка обрабатываемого материала и его механические свойства σв, НВ;
- характеристика поверхности (состояние поверхности заготовки с коркой или без корки);
- технические требования на обрабатываемую поверхность (квалитет точности, шероховатость Rz, Ra);
- размеры обработки: при сверлении, зенкеровании и развертывании: D max - максимальный диаметр отверстия, D min - минимальный диаметр отверстия; при токарной обработке: Dmax - максимальный размер обработки, Dmin - минимальный размер обработки.
- тип инструмента, его размеры, материал режущей части (для станков фрезерной группы Dmax - максимальный диаметр фрезы, мм; Dmin - минимальный диаметр фрезы).
3.1.1. Определение технических характеристик станков сверлильно-расточной группы
При сверлении наибольшая и наименьшая скорости резания определяются по формулам:
| (1) |
| (2) |
Здесь и далее в основу формул для определения скорости резания и мощности положены эмпирические зависимости, значения входящих в них коэффициентов и показателей степеней принимаются по [2].
Предельные частоты вращения шпинделя nmax и пmin определяют по формулам:
| (3) |
| (4) |
где: Vmax, Vmin - предельные скорости резания; Dmax, Dmin - предельные диаметры обработки.
Для выбора промежуточных частот вращением шпинделя, требуется определить диапазон регулирования частот вращения, знаменатель ряда и число ступеней частот вращения.
Отношение предельных значений частот вращения шпинделя называется диапазоном регулирования частот вращения:
| (5) |
Для универсальных станков характерны диапазоны регулирования:
Токарные станки | 20…200 |
Фрезерные | 20…100 |
Карусельные | 25…40 |
Радиально-сверлильные | 20…100 |
Учитывая возможность совершенствования режущих инструментов и технологии обработки, значение Rn для проектируемого станка увеличивают примерно на 25%, соответственно изменяя верхний предел частот вращения шпинделя nmax.
Регулирование скоростей (в данном диапазоне) может быть ступенчатым и бесступенчатым. Современные станки общего назначения в большинстве случаев имеют ступенчатое регулирование частот вращения шпинделя. Коробки скоростей со ступенчатым регулированием более компактны и просты, имеют высокий к. п.д. Частоты вращения шпинделя распределяются по геометрическому ряду, что позволяет обеспечивать постоянный перепад скоростей, а также дает возможность проектировать сложные коробки скоростей, состоящие из элементарных двухваловых передач, также построенных по геометрическому ряду. Геометрический ряд частот вращения имеет следующие стандартные значения:
1,06; 1,12; 1,26; 1,41; I,58; 1,78; 2,00
Они имеют следующую область применения:
φ=1,06 имеет вспомогательное значение;
φ=1,12 применяется в автоматах, где требуется более точная настройка на заданный режим;
φ=1,26 и 1,41 основные ряды в универсальных станках;
φ=1,58 и 1,78 применяются в станках, где время обработки невелико по сравнению со временем холостых ходов;
φ=2,00 применяется редко и имеет вспомогательное значение при расчете промежуточных множительных коробок скоростей.
Число ступеней частот вращения шпинделя определяется по формуле:
| (6) |
Расчетное число ступеней частот вращения шпинделя можно округлить до стандартного значения: 4; 6; 8; 9; 12; 16; I8; 24; 36.
Далее определяются промежуточные значения чисел оборотов:
n1=nmin
n2=n1φ
…………..
nz=nmax=n1φz-1
Полученные значения промежуточных чисел оборотов шпинделя округляются, используя ГОСТ 8032-56 «Предпочтительные числа и ряды предпочтительных чисел» (см. Приложение В).
Мощность привода главного движения определяется по наибольшей эффективной мощности, необходимой для резания. Для сверлильных станков:
| (7) |
где - no число оборотов детали или инструмента об/мин:
| (8) |
M - крутящий момент, определяемый по формуле:
| (9) |
Исходя из максимальной эффективной мощности определяют мощность электродвигателя:
, кВт | (10) |
где: η - к. п.д. привода станка, который принимается η =0,8.
По мощности Nдв и наибольшей полученной частоте вращения nmax выбирается электродвигатель [6].
3.1.2. Определение технических характеристик станков фрезерной группы
При фрезеровании наибольшая и наименьшая скорости резания определяются по формулам:
| (11) |
| (12) |
Предельные частоты вращения шпинделя nmax и nmin определяются по формулам 3 и 4, Dmax , Dmin – предельные диаметры фрез.
Диапазон регулирования частот вращения, знаменатель геометрического ряда, число ступеней частот вращения и промежуточные значения чисел оборотов определяются так же как и для станков сверлильно-расточной группы.
мощность привода главного движения определяется по наибольшей эффективной мощности, необходимой для резания. Для фрезерных станков:
| (13) |
где тангенциальная составляющая силы резания определяется по формуле:
| (14) |
где коэффициенты Ср и Кр, показатели степеней выбираются по справочнику [2]; tmax - максимальная глубина фрезерования; Smax - максимальная подача, мм/об; вmax - максимальная ширина фрезерования, мм; zmax - число зубьев у фрезы с Dmax; Dmax - диаметр фрезы, мм; nmin - минимальное число оборотов шпинделя, об/мин;
Исходя из максимальной эффективной мощности, определяют мощность электродвигателя:
| (15) |
где: η =0,8 – к. п.д. привода станка.
По мощности Nдв и наибольшей полученной частоте вращения nmax выбирается электродвигатель [6].
3.1.3. Определение технических характеристик станков токарной группы
Минимальный диаметр обработки принимается равным:
Dmin=0,25 Dmax | (16) |
Глубина резания определяется по формулам:
| (17) |
где: Ct - коэффициент, зависящий от обрабатываемого материала
(Ct= 0,6 - если обрабатывается чугун, Ct = 0,7 - если обрабатывается сталь); Dmax, Dmin - максимальный и минимальный диаметр обработки; L - длина обрабатываемой заготовки (принимается L=2500);
Далее определяются величины подач, наибольшей Smax и наименьший Smin по допускаемой чистоте обработанной поверхности, Smax - при обдирке изделия диаметром Dmax с глубиной резания tmax , a Smin - при отделке изделия диаметром Dmin с глубиной резания tmin .
Подачи находятся по следующим формулам:
| (18) |
| (19) |
Наибольшая и наименьшая скорость резания определяется:
| (20) |
| (21) |
Предельные частоты вращения шпинделя nmax и nmin определяют по формулам 3 и 4: где Dmax , Dmin - предельные диаметры обработки.
Диапазон регулирования частот вращения, знаменатель геометрического ряда, число ступеней частот вращения и промежуточные значения чисел оборотов определяются, так же как и для станков сверлильно-расточной группы.
мощность привода главного движения определяется по наибольшей эффективной мощности, необходимой для резания. Для токарных станков:
| (22) |
| (23) |
Исходя из максимальной эффективной мощности, определяют мощность электродвигателя:
, кВт | (24) |
где: η =0,8 – к. п.д. привода станка.
По мощности Nдв и наибольшей полученной частоте вращения nmax выбирается электродвигатель [6].
3.2. Кинематический расчет привода станка
3.2.1. Общая часть
Привод главного движения металлорежущего станка состоит из коробки скоростей и электродвигателя. Преимущественное распространение в станках получили асинхронные электродвигатели, что связано с низкой их стоимостью, высокой надежностью и жесткой механической характеристикой.
Регулирование скорости вращения асинхронных двигателей используют сравнительно редко и заключается оно либо за счет переключения числа пар полюсов, либо за счет изменения частоты питания. Односкоростные электродвигатели используются с синхронной частотой вращения: nэ = 750, 100, 1500, 3000, многоскоростные (двухскоростные) nэ = 500/1000, 750/1500, 1500/3000, трехскоростные и четырехскоростные применяются значительно реже.
Коробки скоростей в металлорежущих станках, с точки зрения их кинематической структуры, подразделяются на два вида:
- коробки скоростей с множительной структурой;
- коробки скоростей со сложенной структурой.
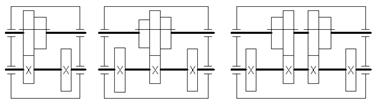
Коробка скоростей с множительной структурой состоит из последовательно расположенных элементарных групповых передач. Элементарная групповая передача – это двухваловая передача на 2, 3 и 4 скорости (рис.1а, б, в). Она состоит из одной кинематической цепи. Общее число скоростей получается путем перемножения чисел скоростей элементарных двухваловых передач (2, 3 и 4 соответственно на рис. 1 а, б и в). |
а) б) в) Рис. 1 Кинематические схемы элементарных групповых передач. |
Коробки скоростей со сложенной структурой строятся по принципу суммирования двух и более кинематических цепей передач, каждая из которых является множительной структурой (подробнее см.[1], стр356).
Кинематический расчет коробки скоростей ведется в следующей последовательности:
1. Построение структурных формул в общем и развернутом виде;
2. Построение структурных сеток и кинематической схемы;
3. Выбор наилучшего варианта структурной сетки;
4. Построение графика чисел оборотов, определение передаточных отношений и чисел зубьев;
Исходными данными для расчета являются:
¾ число ступеней скорости вращения шпинделя Z;
¾ минимальная частота вращения шпинделя nmin ;
¾ знаменатель геометрической прогрессии ряда φ;
¾ число оборотов электродвигателя - nэ.
3.2.2. Построение структурных формул в общем и развернутом виде
Множительная структура привода станка состоит из последовательно включенных групп передач. Число ступеней скоростей такой структуры определяется ее структурной формулой:
z= P1 × P2 × P3…× PК, (25)
где z – число ступеней скорости привода; P1, P2, P3…., Pk – число передач в группах, К – число элементарных групповых передач.
Если в качестве привода используются двухскоростной электродвигатель, то структурная формула запишется:
z= Pэ × P2 × P1 …× PК, , (26)
где Pэ – число ступеней скоростей электродвигателя.
При заданном числе ступеней частот вращения шпинделя количество групп передач, количество передач в каждой группе и порядок расположения групп может быть различным. Этот выбор, в основном, и определяет кинематику и конструкцию коробки скоростей.
Таблица 1. Конструктивные варианты приводов для различных чисел ступеней скорости
6 | 8 | 12 | 16 | 18 | 24 |
2 3 | 2 2 2 | 3 2 2 | 2 3 3 | ||
3 2 | 4 2 | 2 3 2 | 4 2 2 | 3 2 3 | |
2 4 | 2 2 3 | 2 4 2 | 3 3 2 | ||
3 4 | 2 2 4 | ||||
4 3 | 4 4 | 2 3 4 | |||
2 4 3 | |||||
3 2 4 | |||||
3 4 2 | |||||
4 2 3 | |||||
4 3 2 |
При заданном значении z порядок получения промежуточных чисел оборотов от nmin до nmax может быть различным и зависит от принятого порядка переключения групп в передачи. Порядок кинематического включения групп в передачи находит отражение в структурных формулах в развернутом виде.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
