


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Области устойчивости в пространстве коэффициентов 2 < a2 < 4 и 0 < a4 < 5
При номинальной величине a2 = 3 критическое значение a4, кр1 = 0 в сторону уменьшения и a4, кр2 = 2 в сторону увеличения, оптимальное значение по устойчивости выбираем равным a4 = 1.1.
Для проверки области-претендента на устойчивость по критерию Гурвица подставляем выбранное значение в характеристическое уравнение:
- характеристическое уравнение D(s) = s4 + 2s3 + 3s2 + 4s + 1.1 = 0;
- условие D3 = a3·(a1×a2 - a0×a3) – a12a4 = 8 – 4.4 =∙3.6 > 0 выполняется.
Принимая значение a4 = 1.1, находим необходимое значение коэффициента k1 = (a4 – 1)/k2k3 = (1.1 – 1)/(0.1∙10) = 0.1.
Рассчитанная с новым значением k1 передаточная функция САР
 .
.
4.3 Содержание отчета
Отчет по лабораторной работе должен содержать цель работы, характеристическое уравнение системы D(s) = 0, полученный на ЭВМ график областей D-разбиения с обозначением величин и масштаба по обеим осям, обозначением областей D( ) и штриховкой в сторону области устойчивости, визир с координатами выбранной точки, критическое значение an, кр, выбранное значение an, проверку устойчивости системы при этом значении по критерию Гурвица, зависимость an от коэффициента k1, рассчитанное значение k1 и вид передаточной функции системы после подстановки k1.
К защите знать основные определения метода D-разбиения по одному параметру, порядок построения кривых, штриховки, выбора параметра, формулировки и порядок применения критериев Гурвица и Рауса, определение для критического параметра.
5 Коррекция системы методом корневого годографа
5.1 Цель работы
Целью работы является изучение методов проектирования систем по корням характеристического уравнения при заданных показателях качества регулирования.
5.2 Общие сведения
Корневые оценки учитывают влияние на вид переходного процесса положения полюсов и нулей системы на комплексной плоскости. Качество регулирования оценивают лишь для устойчивых систем.
 Корни, ближайшие к мнимой оси, называют доминирующими, если влиянием остальных корней можно пренебречь (остальные корни находятся в 5-10 раз дальше от мнимой оси).
Корни, ближайшие к мнимой оси, называют доминирующими, если влиянием остальных корней можно пренебречь (остальные корни находятся в 5-10 раз дальше от мнимой оси).
Расстояние от мнимой оси до ближайшего к ней корня характеристического уравнения (пары комплексных сопряженных корней) называется степенью устойчивости αmin или η, оно характеризует быстродействие системы. Максимальное по модулю отношение мнимой части корня к действительной ![]() из имеющихся полюсов называется степенью колебательности системы.
из имеющихся полюсов называется степенью колебательности системы.
К основным показателям качества регулирования относятся время регулирования (длительность процесса) и перерегулирование (размах качаний при переходном процессе). Для оценки времени регулирования tрег находят сначала степень устойчивости системы αmin или η, откуда при ошибке ∆=5 %
 .
.
Для оценки перерегулирования s определяют степень колебательности μ системы, а затем значение перерегулирования  . При нескольких парах комплексных корней максимальное значение μ у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки. При единственной паре комплексных корней необходимость выбора отпадает.
. При нескольких парах комплексных корней максимальное значение μ у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки. При единственной паре комплексных корней необходимость выбора отпадает.
Совокупность траекторий, описываемых на комплексной плоскости корнями характеристического уравнения замкнутой системы при изменении одного из ее параметров от 0 до ∞, называется корневым годографом.
Поскольку обычно делают оценку для замкнутой системы, то в ее характеристическое уравнение попадают и нули, и полюса разомкнутой системы. Если  , то
, то ![]() . Чаще всего изменяют k – коэффициент усиления регулятора, вычисляют для каждого значения корни и наносят их на комплексную плоскость.
. Чаще всего изменяют k – коэффициент усиления регулятора, вычисляют для каждого значения корни и наносят их на комплексную плоскость.
При построении корневого годографа обычно используют или кратным действительным корням характеристического уравнения;
- при k, стремящемся к нулю, траектории корней начинаются в полюсах передаточной функции разомкнутой системы;
- при k, стремящемся к бесконечности, m траекторий корней заканчиваются в нулях передаточной функции разомкнутой системы, а остальные n-m ветвей асимптотически уходят в бесконечность. Здесь m – это порядок полинома числителя, а n – порядок полинома знаменателя передаточной функции системы.
5.3 Указания к работе
В работе производится выбор значения коэффициента обратной связи kос в звене 6, ранее принимаемого равным единице, по условию получения минимального времени регулирования.
Поскольку этот коэффициент попадает в свободный член характеристического уравнения an, предварительно следует выразить аналитически зависимость этого коэффициента от коэффициента kос, учитывая новое значение k1, полученное в предыдущей работе.
Используя программу ROOTLOCS "Корневой годограф" из библиотеки LinCAD и характеристическое уравнение системы из предыдущей работы, получить корневой годограф системы (рисунок 7) при изменении коэффициента an в задаваемом диапазоне (от нуля до значения, при котором корни перемещаются вправо от мнимой оси). Перемещая маркер по годографу, найти значение коэффициента, при котором все корни максимально удалены от мнимой оси. При этом и будет обеспечиваться наименьшее возможное время регулирования (наибольшее значение степени устойчивости).
Перенести корневой годограф в отчет с обозначением осей и масштаба, показать стрелками на ветвях направления движения корней при увеличении an, провести линию степени устойчивости и луч выбора корней для оценки степени колебательности. Возле точек, соответствующих наименьшему, наибольшему и выбранному значениям коэффициента an подписать значения этого коэффициента. Допускается полюс, далеко отстоящий от мнимой оси, не показывать, если это не нарушает наглядности выбора показателей качества.
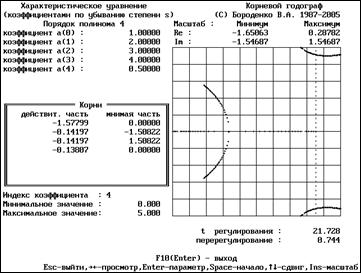
Рисунок 7
Для выбранного значения an записать соответствующие ему величины времени регулирования tрег, перерегулирования s и полученное значение коэффициента обратной связи kос.
5.4 Методический пример
Характеристическое уравнение системы
D(s) = s4 + 2s3 + 3s2 + 4s + (k1k2k3koc + 1) =
= s4 + 2s3 + 3s2 + 4s + 1.1 = 0;
Принимаем диапазон изменения коэффициента a4, включающего коэффициент обратной связи, в пределах граничных значений 0-2, найденных в предыдущей работе.
Таблица значений корней знаменателя ПФ
Значение коэффициента а4 | |||
а4, min = 0.000 | а4, max = 2.000 | а4, опт = 0.523 | |
полюса системы | 0.000 | -1.000 | -0.145 |
-0.174 + j1.547 | -1.000 | -0.140 + j1.506 | |
-0.174 - j1.547 | 0.000 + j1.414 | -0.140 - j1.506 | |
-1.650 | 0.000 - j1.414 | -1.574 |
Корневой годограф
Показатели качества для выбранного значения а4 = 0.523: время регулирования tрег = 21.36 с, перерегулирование σ = 0.746 или 74.6 %.
Вычисленное значение коэффициента обратной связи
kос = (a4 – 1)/k1k2k3 = (0.523 – 1)/(0.1∙0.1∙10) = -0.477/0.1 = -4.77.
5.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, характеристическое уравнение системы, корневой годограф с осями, нанесенными ветвями и таблицей, содержащей значения всех полюсов не менее, чем для трех значений an, включая наименьшее, наибольшее и окончательно выбранное, значения выбранных времени регулирования и перерегулирования, вид зависимости коэффициента характеристического уравнения an от коэффициента kос, полученное значение kос.
К защите нужно знать все определения по корневому годографу и корневым оценкам качества регулирования, свойства корневого годографа, уметь самостоятельно определить доминирующие корни, время регулирования и перерегулирование по расположению корней на комплексной плоскости.
6 Исследование прямых оценок качества регулирования
6.1 Цель работы
Целью работы является изучение методов проектирования систем с использованием прямых показателей качества регулирования в переходном и установившемся режимах.
6.2 Общие сведения
Показатели качества, определяемые непосредственно по переходным характеристикам, называют прямыми оценками качества, а сам метод их вычисления называется прямым. Менее точные методы оценки качества называются косвенными, к ним относятся корневые, частотные и интегральные методы.
Время регулирования tрег равно времени от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки ∆ (рисунок 8). Зону допустимой ошибки ∆=0,05·h(∞) или ∆=0,05·ε(0) откладывают с обеих сторон от линии установившегося значения. При ненулевых начальном или установившемся значениях в качестве допустимой зоны принимают 5% от разницы |h(∞)–h(0)| или |ε(∞)–ε(0)|.
а) – выходная величина y(t) б) – ошибка регулирования ε(t)
или h(t) или отклонение δ(t)
Рисунок 8
Перерегулированием σ называется величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
 или
или  .
.
Перерегулирование характеризует склонность системы к колебаниям, рекомендуются значения не более 15…30 %.
Время нарастания tн, характеризует скорость реакции в начальный период, определяется как:
- время от начала процесса до момента пересечения кривой с линией установившегося значения – этот метод не подходит для оценки монотонных процессов, когда характеристика приближается к установившемуся значению асимптотически в течение бесконечного интервала времени;
- промежуток времени между моментами достижения заданных уровней (например, 10 и 90 %) установившегося значения – более универсальный метод.
Очевидно, что при указании времени нарастания следует указывать, каким способом оно получено.
Время достижения первого максимума tmax (подразумевается, что первый максимум кривой является и наибольшим из всех).
Коэффициент колебательности N – число забросов переходной характеристики через линию установившегося значения за время регулирования.
Установившаяся ошибка характеризует точность системы в статическом режиме, после окончания переходного процесса. Если установившаяся ошибка ε(∞) = 0, система называется астатической, для случая ε(∞) ≠ 0 система называется статической. Статическая система всегда имеет ошибку регулирования, которую можно уменьшить, увеличивая общий коэффициент усиления системы.
6.3 Указания к работе
Предварительно для построения переходных характеристик по выходу e(t) относительно входов r(t) и f(t) необходимо рассчитать обе соответствующие передаточные функции с учетом окончательно выбранных k1 и kос (работы 4 и 5). Используется программа EILERPIC "Переходная характеристика" из библиотеки LinCAD, которая по введенным коэффициентам числителя и знаменателя передаточной функции строит отклик системы на единичный скачок от нуля до заданного момента времени (рисунок 9).
Длительность периода исследования подбирают экспериментально так, чтобы к концу периода переходный процесс заканчивался, но в то же время все параметры характеристики легко определялись. После нанесения на график вспомогательных построений и необходимых вычислений должны быть определены (с учетом масштаба) значения перерегулирования, времени регулирования, коэффициента колебательности, времен нарастания и максимума, сделана оценка – к какому виду систем (астатические, статические) относится данная система регулирования.
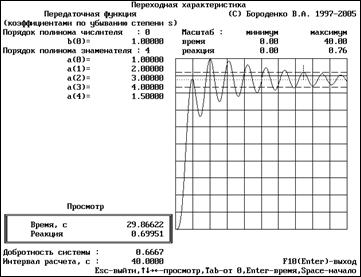
Рисунок 9
6.4 Методический пример
Передаточная функция системы по выходу e(t) относительно входа r(t) равна
 .
.
Переходная характеристика ошибки регулирования εr(t)
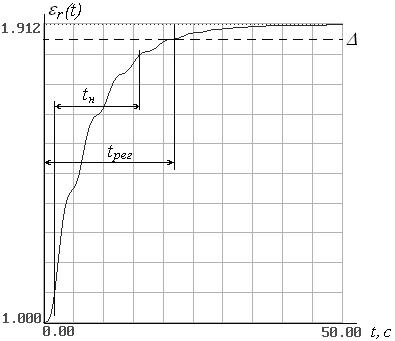
Время регулирования при ошибке Δ=5 % или Δ = 0.05(1.912–1.0) = 0.0456 равно tрег = 21.66 с, Поскольку процесс монотонный и перебросы через линию установившегося значения отсутствуют, время нарастания определяется по диапазону 10-90 % и равно tн = 14.245 с, коэффициент колебательности N = 0, время максимума tмакс не определяется, перерегулирование равно σ = 0. Система является статической по входу r(t) и воздействию 1(t), поскольку для этих условий установившаяся ошибка εr(∞) = 1.912 ≠ 0.
6.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, передаточную функцию системы по выходу e(t) относительно входа r(t), передаточную функцию системы по выходу e(t) относительно входа f(t), обе переходные характеристики ошибки регулирования ε(t) в масштабе с необходимыми графическими построениями и найденными из каждого графика значениями прямых оценок качества, заключение о точности системы в установившемся режиме относительно данного входа и данного вида воздействия.
К защите знать существующие методы определения показателей качества регулирования, знать определения и методику графического измерения прямых оценок качества по переходной характеристике, принципы деления систем по величине установившейся ошибки.
7 Оценка запасов устойчивости системы регулирования
7.1 Цель работы
Целью работы является изучение методов определения количественных оценок запасов устойчивости системы с помощью частотного критерия устойчивости Найквиста в логарифмической форме.
7.2 Общие сведения
Логарифмические частотные характеристики (ЛЧХ) или диаграммы Боде позволяют упростить построения за счет замены реальной характеристики асимптотической; упростить расчеты за счет замены умножения коэффициентов последовательных звеньев геометрическим сложением графиков; растянуть низкочастотный диапазон исследования системы и сжать высокочастотный.
Зависимость L(ω)=20lgA(ω) от lg(ω) называется логарифмической амплитудной частотной характеристикой (ЛАЧХ) или ЛАХ.
Зависимость φ(ω) от lg(ω) называется логарифмической фазной частотной характеристикой (ЛФЧХ) или просто ЛФХ.
Используемые единицы измерения: для ЛАЧХ L(ω) – децибелы или дБ, для ЛФЧХ φ(ω) – градусы, для частоты ω, откладываемой по оси абсцисс – декады (дек). Декадой называется отрезок частот, равный изменению частоты в 10 раз.
Замкнутая система устойчива, если в момент пересечения ЛФЧХ разомкнутой системы линии -180° ее ЛАЧХ отрицательна.
Запас устойчивости замкнутой системы по амплитуде Aм, дБ, определяется в момент пересечения ЛФЧХ разомкнутой системы линии -180 градусов как абсолютное значение разницы между осью L(ω)=20lgA(ω)=0 и значением ЛАЧХ, если оно при этом отрицательно. Запас устойчивости по фазе φм, град, определяется как абсолютное значение разницы между значением -180° и значением ЛФЧХ на частоте среза. Частота среза соответствует точке пересечения ЛАЧХ с осью частот, т. е. значению L(ω)=20lgA(ω)=0.
Рекомендуемые значения запасов устойчивости: при определении по АФЧХ Ам ≥ 0.5, φм ≥ 30-60 градусов, при определении по ЛЧХ Ам ≥ 6-12 дБ, запас по фазе остается тем же.
7.3 Указания к работе
Предварительно вычисляют передаточную функцию Wраз(s) разомкнутой системы по контуру главной обратной связи при исключенном сумматоре и выбранных k1 и kос (работы 4 и 5). Если значение выбранного коэффициента обратной связи оказалось отрицательным, в числителе передаточной функции разомкнутой системы при вводе данных в компьютер следует указывать его абсолютное значение.
Для построения логарифмических характеристик используется программа BODECHAR "Логарифмические характеристики" из библиотеки LinCAD (рисунок 10).
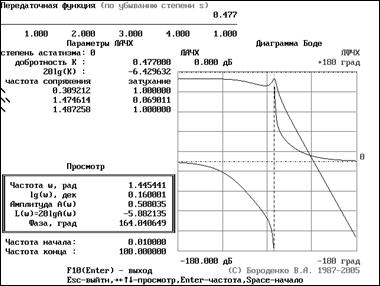
Рисунок 10
По введенным коэффициентам полиномов числителя и знаменателя передаточной функции Wраз(s) в заданном диапазоне изменения частоты w программа строит графики логарифмической амплитудной (ЛАЧХ) и фазной (ЛФЧХ) частотных характеристик, которые можно просматривать, перемещая стрелками курсора указатель по рабочему полю. Начальное и конечное значения частот подбирают экспериментально, так, чтобы все изменения направления ЛАЧХ умещались на графике (можно начать подбор с частот 0.01 и 100 рад/с).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
