


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
К защите нужно знать все определения по корневому годографу и корневым оценкам качества регулирования, свойства корневого годографа, уметь самостоятельно определить доминирующие корни, время регулирования и перерегулирование по расположению корней на комплексной плоскости.
6 Исследование прямых оценок качества регулирования
6.1 Цель работы
Целью работы является изучение методов проектирования систем с использованием прямых показателей качества регулирования в переходном и установившемся режимах.
6.2 Общие сведения
Показатели качества, определяемые непосредственно по переходным характеристикам, называют прямыми оценками качества, а сам метод их вычисления называется прямым. Менее точные методы оценки качества называются косвенными, к ним относятся корневые, частотные и интегральные методы.
Время регулирования tрег равно времени от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки ∆ (рисунок 8). Зону допустимой ошибки ∆=0,05·h(∞) или ∆=0,05·ε(0) откладывают с обеих сторон от линии установившегося значения. При ненулевых начальном или установившемся значениях в качестве допустимой зоны принимают 5% от разницы |h(∞)–h(0)| или |ε(∞)–ε(0)|.
а) – выходная величина y(t) б) – ошибка регулирования ε(t)
или h(t) или отклонение δ(t)
Рисунок 8
Перерегулированием σ называется величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
 или
или  .
.
Перерегулирование характеризует склонность системы к колебаниям, рекомендуются значения не более 15…30 %.
Время нарастания tн, характеризует скорость реакции в начальный период, оно определяется как:
- время от начала процесса до момента пересечения кривой с линией установившегося значения – этот метод не подходит для оценки монотонных процессов, когда характеристика приближается к установившемуся значению асимптотически в течение бесконечного интервала времени;
- промежуток времени между моментами достижения заданных уровней (например, 10 и 90 % установившегося значения) – более универсальный метод.
Очевидно, что при определении времени нарастания следует обязательно указывать, каким способом оно получено.
Время достижения первого максимума tmax (подразумевается, что первый максимум кривой является и наибольшим из всех).
Коэффициент колебательности N – число забросов переходной характеристики через линию установившегося значения за время регулирования.
Установившаяся ошибка характеризует точность системы в статическом режиме, после окончания переходного процесса. Если установившаяся ошибка ε(∞) = 0, система называется астатической, для случая ε(∞) ≠ 0 система называется статической. Статическая система всегда имеет ошибку регулирования, которую можно уменьшить, увеличивая общий коэффициент усиления системы.
6.3 Указания к работе
Предварительно для построения переходных характеристик по выходу e(t) относительно входов r(t) и f(t) необходимо рассчитать обе соответствующие передаточные функции с учетом окончательно выбранных k1 и kос (работы 4 и 5). Используется программа EILERPIC "Переходная характеристика" из библиотеки LinCAD, которая по введенным коэффициентам числителя и знаменателя передаточной функции строит отклик системы на единичный скачок от нуля до заданного момента времени (рисунок 9).
Длительность периода исследования подбирают экспериментально так, чтобы к концу периода переходный процесс заканчивался, но в то же время все параметры характеристики легко определялись. После нанесения на график вспомогательных построений и необходимых вычислений должны быть определены (с учетом масштаба) значения перерегулирования, времени регулирования, коэффициента колебательности, времен нарастания и максимума, сделана оценка – к какому виду систем (астатические, статические) относится данная система регулирования.
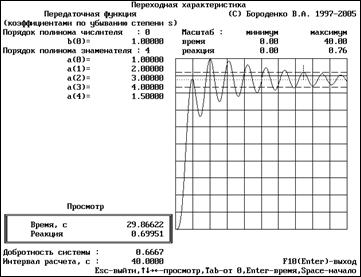
Рисунок 9
6.4 Методический пример
Передаточная функция системы по выходу e(t) относительно входа r(t) равна
 .
.
Переходная характеристика ошибки регулирования εr(t)
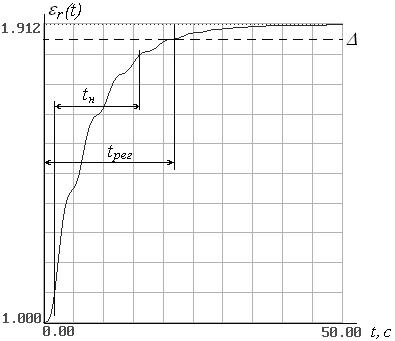
Время регулирования при ошибке Δ=5 % или Δ = 0.05(1.912–1.0) = 0.0456 равно tрег = 21.66 с, Поскольку процесс монотонный и перебросы через линию установившегося значения отсутствуют, время нарастания определяется по диапазону 10-90 % и равно tн = 14.245 с, коэффициент колебательности N = 0, время максимума tмакс не определяется, перерегулирование равно σ = 0. Система является статической по входу r(t) и воздействию 1(t), поскольку для этих условий установившаяся ошибка εr(∞) = 1.912 ≠ 0.
6.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, передаточную функцию системы по выходу e(t) относительно входа r(t), передаточную функцию системы по выходу e(t) относительно входа f(t), обе переходные характеристики ошибки регулирования ε(t) в масштабе с необходимыми графическими построениями и найденными из каждого графика значениями прямых оценок качества, заключение о точности системы в установившемся режиме относительно данного входа и данного вида воздействия.
К защите знать существующие методы определения показателей качества регулирования, знать определения и методику графического измерения прямых оценок качества по переходной характеристике, принципы деления систем по величине установившейся ошибки.
7 Оценка запасов устойчивости системы регулирования
7.1 Цель работы
Целью работы является изучение методов определения количественных оценок запасов устойчивости системы с помощью частотного критерия устойчивости Найквиста в логарифмической форме.
7.2 Общие сведения
Логарифмические частотные характеристики (ЛЧХ) или диаграммы Боде позволяют упростить построения за счет замены реальной характеристики асимптотической; упростить расчеты за счет замены умножения коэффициентов последовательных звеньев геометрическим сложением графиков; растянуть низкочастотный диапазон исследования системы и сжать высокочастотный.
Зависимость L(ω)=20lgA(ω) от lg(ω) называется логарифмической амплитудной частотной характеристикой (ЛАЧХ) или ЛАХ.
Зависимость φ(ω) от lg(ω) называется логарифмической фазной частотной характеристикой (ЛФЧХ) или просто ЛФХ.
Используемые единицы измерения: для ЛАЧХ L(ω) – децибелы или дБ, для ЛФЧХ φ(ω) – градусы, для частоты ω, откладываемой по оси абсцисс – декады (дек). Декадой называется отрезок частот, равный изменению частоты в 10 раз.
Замкнутая система устойчива, если в момент пересечения ЛФЧХ разомкнутой системы линии -180° ее ЛАЧХ отрицательна.
Запас устойчивости замкнутой системы по амплитуде Aм, дБ, определяется в момент пересечения ЛФЧХ разомкнутой системы линии -180 градусов как абсолютное значение разницы между осью L(ω)=20lgA(ω)=0 и значением ЛАЧХ, если оно при этом отрицательно. Запас устойчивости по фазе φм, град, определяется как абсолютное значение разницы между значением -180° и отрицательным значением ЛФЧХ на частоте среза. Частота среза соответствует точке пересечения ЛАЧХ с осью частот, т. е. значению L(ω)=20lgA(ω)=0.
Рекомендуемые значения запасов устойчивости: при определении по АФЧХ Ам ≥ 0.5, φм ≥ 30-60 градусов, при определении по ЛЧХ Ам ≥ 6-12 дБ, запас по фазе остается тем же.
7.3 Указания к работе
Предварительно вычисляют передаточную функцию Wраз(s) разомкнутой системы по контуру главной обратной связи при исключенном сумматоре и выбранных ранее значениях k1 и kос.
Для построения логарифмических характеристик используется программа BODECHAR "Логарифмические характеристики" из библиотеки LinCAD (рисунок 10).
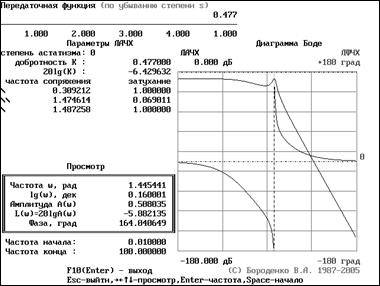
Рисунок 10
По введенным коэффициентам полиномов числителя и знаменателя передаточной функции Wраз(s) в заданном диапазоне изменения частоты w программа строит графики логарифмической амплитудной (ЛАЧХ) и фазной (ЛФЧХ) частотных характеристик, которые можно просматривать, перемещая стрелками курсора указатель по рабочему полю. Начальное и конечное значения частот подбирают экспериментально, так, чтобы все изменения направления ЛАЧХ умещались на графике (можно начать подбор с частот 0.01 и 100 рад/с).
Дополнительно программа вычисляет добротность системы, порядок астатизма, частоты сопряжения, указывает кратность для комплексных сопряженных корней и направление асимптоты – вверх для корней числителя, вниз – для корней знаменателя. Эти данные могут быть использованы при самостоятельном построении ЛАЧХ.
7.4 Методический пример
Передаточная функция разомкнутой системы

Логарифмические частотные характеристики
Из графика запас устойчивости по амплитуде равен Ам = 0.508 или 5.882 дБ, запас устойчивости по фазе равен максимальному значению φм = 180 град, поскольку ЛАЧХ отрицательна во всем диапазоне частот, частота среза отсутствует. Значения запасов удовлетворяют стандартным требованиям к САР.
7.5 Содержание отчета
Отчет к лабораторной работе должен содержать название, цель работы, структурную схему системы с указанием точек размыкания контура обратной связи, передаточную функцию разомкнутой системы, окончательный вид ЛФЧХ и ЛАЧХ в соответствующем масштабе с необходимыми графическими построениями, найденные значения запасов устойчивости по амплитуде и фазе с учетом единиц измерения – на графике и отдельно, с указанием частот, которым соответствуют эти запасы.
К защите необходимо знать формулировки критерия Найквиста в обычном и логарифмическом виде, особенности его применения, методику построения асимптотической ЛАЧХ и расчета необходимых для этого параметров, единицы измерения ЛЧХ, нормы запасов устойчивости при их оценке по АФЧХ и ЛЧХ.
Литература
1 Бороденко курс теории линейных систем автоматического регулирования. – Павлодар : Изд-во ПГУ, 2007. – 260 с.
2 Ерофеев автоматического управления. – 2-е изд., перераб. и доп. – СПб. : Политехника, 2005. – 302 с.
3 Электрические системы. Математические задачи электроэнергетики: Учебник для студентов вузов / Под ред. – 2-е изд., перераб. и доп. – М.: Высш. школа, 1981. – 288 с.
4 Сборник задач по теории автоматического регулирования и управления: Под ред. . – 5-е изд. – М.: Наука, 1978. – 512 с.
Приложение А
(справочное)
Структурные преобразования
Для анализа или синтеза систему представляют структурной схемой, состоящей из звеньев, ветвей, узлов и сумматоров. Звено или блок обычно изображается прямоугольником, имеющим вход и выход с указанием функции преобразования внутри. Узлы (места разветвления сигнала) обозначаются на графической схеме точкой с диаметром 1,5 - 2 мм. Ветвь (связь) представляется линией со стрелкой в конце, отображающей направление движения сигнала. Сумматоры (элементы сравнения) представляют собой места схождения сигналов.
| Они обозначаются либо пустым кружком среднего размера (крупнее узла), либо крупным кружком, перечеркнутым крест накрест прямыми линиями. |
Сумматор, как правило, имеет не более трех входов, не более одного выхода и коэффициент передачи k = 1. Все входы сумматора независимы друг от друга. Если на входе сумматора производится изменение знака сигнала (инвертирование), т. е. по этому входу коэффициент сумматора равен минус единице, вход называется инвертирующим, а сумматор – элементом сравнения. Такой вход сумматора обозначается минусом для изображения в виде пустого кружка, и затушеванным сектором для обозначения в виде крупного кружка.
Обычно при известных функциях передачи отдельных звеньев требуется найти эквивалентную передаточную функцию (ПФ) объединения звеньев (объекта, регулятора), либо всей системы в целом. Для этого используют правила структурных преобразований:
1) Последовательное соединение звеньев.
Эквивалентная передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
2) Параллельное соединение звеньев.
Эквивалентная передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (с учетом знака входа сумматора на пути сигнала).
3) Соединение с обратной связью (встречно-параллельное).
Эквивалентная передаточная функция соединения с обратной связью равна дроби, в числителе которой записана ПФ звена на прямом пути от входа к выходу, а в знаменателе – единица минус произведение ПФ звеньев по замкнутому контуру обратной связи (ЗКОС).
4) Перенос воздействий в системах с перекрестными связями (правило структурных преобразований, применяющееся, если система включает соединения смешанного типа – не чисто последовательные, и не чисто параллельные).
Чтобы результирующая система не изменилась, в цепь переносимого воздействия вводят фиктивное звено с ПФ, равной передаточной функции потерянных, либо обратной передаточной функции приобретаемых при переносе звеньев.
Смысл правила состоит в том, что любые изменения по сравнению с исходной схемой, появляющиеся в системе после ее преобразования, не должны влиять на результирующую передаточную функцию.
5) Правило Мейсона.
Правило рассматривает систему как ориентированный граф и позволяет описать ее всю сразу, без преобразований по отдельным фрагментам.
Передаточная функция системы образует дробь, числитель которой равен сумме произведений ПФ прямых путей на совокупные определители ЗКОС, не касающихся этих путей, а знаменатель – единица минус сумма произведений определителей несоприкасающихся ЗКОС и передаточных функций общих ЗКОС.
![]() Определитель ЗКОС равен разности единицы и произведения ПФ звеньев по контуру, например, Δ12=1-(-W1W2)=1+W1W2.
Определитель ЗКОС равен разности единицы и произведения ПФ звеньев по контуру, например, Δ12=1-(-W1W2)=1+W1W2.
При составлении полинома числителя передаточной функции Wzx показанной системы вычисляем ПФ прямого пути от входа х к выходу z (равна коэффициенту передачи сумматора 1) и проверяем, что все замкнутые контуры обратной связи касаются этого прямого пути. Данное условие не выполняется, поэтому нужно умножить ПФ прямого пути на определитель несоприкасающегося с ним ЗКОС Δ23=1-W2W3. При составлении полинома знаменателя передаточной функции убеждаемся, что все замкнутые контуры обратной связи касаются друг друга (имеют общий участок), тогда единица на все контуры одна. Следовательно, записываем в знаменателе единицу и далее плюс-минус произведения ПФ звеньев по каждому ЗКОС. Окончательно в общем виде ПФ равна
 .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
