


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.4.3.6 Определить рациональный состав пахотного агрегата и основную передачу трактора (по коэффициенту использования силы тяги трактора ηи).
 (1.10)
(1.10)
где ηи - коэффициент использования силы тяги трактора.
Полученные при расчете значения коэффициента ηи необходимо сравнить с оптимальным значением ηопт (таблица А1). У рационально скомплектованного агрегата значение ηи всегда наиболее близко к ηопт , но не превышает его. Чем ближе значение ηи к ηопт , тем выше производительность и экономичность работы агрегата.
В заключение студенту необходимо записать вывод: для заданных условий работы к трактору_________ необходимо присоединить плуг_______ с числом корпусов (столько-то)____и работать на_____основной передаче с рабочей скоростью vp = ____ км/ч. Результаты расчетов по комплектованию агрегата следует представить в виде таблицы 1.4.
Таблица 1.4 - Эксплуатационно-техническая характеристика пахотного агрегата
Состав агрегата | Ширина захвата агрегата Впл, м | Тяговое сопротиление Rпл, кН | Основная передача | Рабочая скорость движения | ||
трактор | плуг | число корпусов | ||||
ДТ-75М | ПЛН-4-35 | 4 | 1,75 | 17,3 | 4 | 6,98 |
1.4.4 Расчет вылета маркёра выполняется следующим образом.
Маркёры применяют при посеве и посадке сельскохозяйственных культур и некоторых других работах для лучшего соблюдения рабочей ширины захвата агрегата. Поэтому студенту при выполнении расчетной работы эти вычисления нужно делать только при необходимости.
Маркёр представляет собой приспособление, оставляющее на почве след обычно в виде неглубокой борозды. Расстояние от метчика маркёра до ближайшего к нему следа рабочего органа машины называется вылетом маркёра. При работе с маркёром тракторист обычно направляет правое колесо или внутреннюю кромку правой гусеницы трактора по следу, проделанному метчиком маркёра. При этом условии вылеты маркёров определяются по зависимостям: для колесных тракторов
![]() Хпр=(Вр – ат + т)/2,
Хпр=(Вр – ат + т)/2,
Хлев=(Вр + ат + т)/2, (1.11)
для гусеничных тракторов
![]() Хпр=(Вр – ат + аг + т)/2,
Хпр=(Вр – ат + аг + т)/2,
Хлев=(Вр + ат + аг + т)/2, (1.12)
где Хпр , Хлев - вылет маркёров, соответственно: правого, левого, м;
Вр - рабочая ширина захвата агрегата, м;
ат - колея трактора, м, (таблица А1);
аг – ширина гусеничной цепи, м;
т – ширина стыкового междурядья, м.
Ширина аг гусеничной цепи для трактора Т-130 равно 0,50 м, тракторов Т-150, ДТ-75М – 0,39 м, Т-70С, Т-54В – 0,30 м. Ширина стыкового междурядья обычно равна ширине основного. Значение т для рядовых зерновых сеялок равно 0,15 м, узкорядных – 0,08 м; кукурузных (в том числе для посева подсолнечника) – 0,7 м; свекловичных – 0,45 м.
При вождении по "пробке радиатора" трактора значение ат= 0, тогда
Хпр= Хпр= (Вр + т)/2, (1.13)
1.4.5 Студенту в расчетной работе следует описать подготовку агрегата к работе в следующем порядке, используя, например, пособие [15].
1.4.5.1 Проверка технического состояния трактора и машин, входящих в агрегат (комплексность, исправность, проведение технического обслуживания).
1.4.5.2 Регулировка и установка рабочих органов машины (технологическая настройка). Проводится в основном с целью обеспечения нормы высева, глубины заделки семян, глубины обработки, высоты среза и качества выполнения работы. Используют регулировочную площадку.
1.4.5.3 Составление агрегата в натуре (соединение сельхозмашин с трактором). Оборудуют агрегат при необходимости маркёрами и сигнализирующими приборами. Точки прицепа машин должны располагаться на сцепке симметрично относительно линии движения агрегата на расстоянии друг от друга, равном их рабочей ширине захвата. При эшелонированной схеме соединения нечетного числа машин в агрегат большее их количество располагают в переднем ряду. Студенту необходимо привести схему агрегата с основными размерами (конструктивная ширина захвата агрегата В; кинематическая длина агрегата lк, трактора lт, сцепки lсц, сельхозмашины lм; вылет маркёра и т. д., используя данные расчетов и таблицы А1, А3 и А4). Значение кинематической длины агрегата lк можно определить как сумму длин lт, lсц и lм. В качестве примера на рисунке 1.1 представлена схема посевного агрегата. Схемы агрегатов приведены на рисунках в пособии [15].
1.4.5.4 Производят опробование агрегата на холостом ходу и в работе: на близлежащем поле проверяют и регулируют рабочие органы (на глубину обработки, качество заделки семян, норму высева, равномерность рассева), обращая особое внимание на правильность установки рабочих органов, надежность креплений и соединений.
Подготовка рабочего участка к работе агрегатов предусматривает его осмотр с целью устранения или обозначения препятствий, которые могут ухудшить качество выполняемой работы или снизить производительность агрегатов; выбор основного направления и способа движения агрегатов; отбивку поворотных полос; разбивку рабочего участка на загоны; провешивание и при необходимости (при пахоте) выполнение первых проходов на загоне; определение и обозначение мест заправки, замены и разгрузки технологических емкостей агрегатов [2-5, 15].
1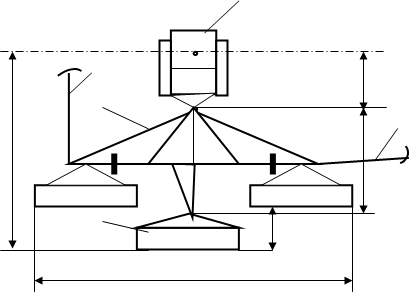
Т
4 l
2
4
lк lсц
3
lм
Вк
1 – трактор ДТ-75М; 2 – сцепка СП-11; 3 – сеялка СЗ-3,6; 4 – маркер
Рисунок 1.1 - Схема посевного агрегата
1.5.1 Осмотреть поле и устранить препятствия, которые могут помешать движению агрегата и работе механизмов. Неустранимые препятствия оградить или возле них установить предупредительные знаки.
1.5.2 Выбрать способы и направление движения агрегата.
Способы движения агрегата (не менее двух) необходимо выбрать исходя из особенностей технологического процесса и конструкции машин [12, c.35-41; 15, с.33-35]. Если выбранные способы движения агрегата оказались только гоновыми, то желательно, чтобы один из них был бы петлевым, а другой - беспетлевым.
При способах движения "челноком", всвал, вразвал, с чередованием обработки загонов всвал и вразвал, диагонально-челночном и диагонально-перекрестном агрегат совершает петлевые повороты (холостые ходы) на концах гона. При способах движения "перекрытием", двухзагонным, комбинированным, четырехзагонным агрегат совершает беспетлевые холостые ходы.
При использовании гоновых способов направление движения агрегата целесообразно намечать вдоль длинной стороны поля правильной формы (в виде прямоугольника).
Для предотвращения водной эрозии почв направление движения агрегатов при выполнении всех работ - поперек склона (по горизонталям). Направление предпосевной культивации не должно совпадать с направлением вспашки и посева.
1.5.3 Определить длину выезда агрегата e.
Значение длины выезда агрегата e определяется исходя из особенностей технологического процесса и конструкции машин. Для случаев, когда во время разворота агрегата рабочие органы машины не переводятся в транспортное положение, значение длины выезда агрегата равно половине его кинематической длины lк . В остальных случаях длина выезда e равна кинематической длине lк агрегата. Значение кинематической длины агрегата lк рассчитано в п. 1.4.5.3.
1.5.4 Определить радиус поворота агрегата R , используя данные таблицы А6.
1.5.5 Определить рабочую ширину захвата агрегата Вр.
Конструктивная ширина захвата B агрегата зачастую не равна действительной рабочей ширине захвата Вр , так как из-за опасения оставить огрехи (необработанные участки поля) смежные проходы агрегат выполняет с перекрытием. Рабочая ширина захвата агрегата определяется по формуле:
Вр= β · В, (1.14)
где Вр - рабочая ширина захвата агрегата, м;
β - коэффициент использования конструктивной ширины захвата (таблица А5),
В – конструктивная ширина захвата агрегата, м.
Значение конструктивной ширины захвата В приведены в таблицах 1.2, или 1.3, или 1.4 в зависимости от вида агрегата.
1.5.6 Отбить поворотные полосы.
Ширина поворотной полосы должна быть минимально-допустимой и кратной рабочей ширине захвата агрегата. Студенту необходимо выполнить расчет ширины поворотной полосы и поместить этот расчет в настоящий пункт. При круговых способах движения поворотная полоса не выделяется, а потому ее ширина не рассчитывается.
Минимальная ширина Emin поворотной полосы при петлевых поворотах агрегата определится
Emin=3R+e, (1.15)
а при беспетлевых поворотах
Emin=1,5R+e. (1.16)
Ширина E поворотной полосы выбирается такой, чтобы ее значение было бы не менее Emin и кратным рабочей ширине захвата того агрегата, который будет осуществлять обработку поворотной полосы. Поэтому полученное значение Emin необходимо разделить на значение рабочей ширины Bр захвата агрегата, а результат округлить до целого числа в сторону увеличения, то есть получить значение минимального числа проходов nп агрегата, необходимое для обработки поворотной полосы. Тогда
E = nп× Bр , (1.17)
где E - уточненная ширина поворотной полосы, м;
nn – минимальное число проходов агрегата, необходимое для обработки
поворотной полосы;
Bp – рабочая ширина захвата агрегата, м.
1.5.7 Определить рабочую длину гона Lp.
Рабочая длина гона Lp для гоновых способов движения определится по формуле:
Lp= Lуч – 2E, (1.18)
где Lp – рабочая длина гона, м;
Lуч – длина участка, м.
Средняя длина рабочего хода Lp для кругового способа движения [15]
Lp=Lуч/2, (1.19)
для диагональных способов движения
Lp= , (1.20)
, (1.20)
где Суч - ширина участка, м.
1.5.8 Определить ширину загона С (для челночного и диагональных способов движения этот пункт не рассчитывать).
Сначала рассчитывается значение оптимальной ширины загона Сопт по формулам, приведенным в таблице А8.
Действительное (уточненное) значение ширины С загона должно быть не меньше Сопт и кратно двойной ширине прохода агрегата. Поэтому полученное при расчете значение Сопт необходимо разделить на значение удвоенной ширины захвата 2Bр агрегата, результат округлить до целого числа в сторону увеличения, обозначив его через nкр.. Тогда ширина загона С определится по формуле:
С = nкр× 2Bр , (1.21)
где С - уточненная ширина загона, м;
nкр- число двойных проходов агрегата (кругов), необходимое для обра-
ботки загона шириной С.
1.5.9 Определить среднюю длину lx холостого хода, пользуясь формулами, помещенными в таблице А7.
1.5.10 Определить коэффициент рабочих ходов j по формуле:
j = Lр / (Lр + lх),
где j - коэффициент рабочих ходов.
Расчеты по определению кинематической характеристики агрегата и рабочего участка следует свести в таблицу 1.5.
Таблица 1.5 - Кинематические характеристики агрегата и рабочего участка
Способ движения | lк, м | R, м | e, м | E, м | Lр, м | С, м | lх, м | j |
1. Челночный 2. Перекрытием | 11,7 11,7 | 14,0 14,0 | 11,7 11,7 | 54,0 43,2 | 1392,0 1413,6 | - 151,2 | 107,6 120,1 | 0,93 0,92 |
1.5.11 Выбрать рациональный способ движения агрегата.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
