

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Общая трудоемкость ТОР при данной стратегии ниже, чем при стратегии "по времени". Очевидно, что стратегии "по ресурсу" наиболее целесообразны для оборудования, работающего в стационарных режимах и мало изменяющихся условиях эксплуатации.
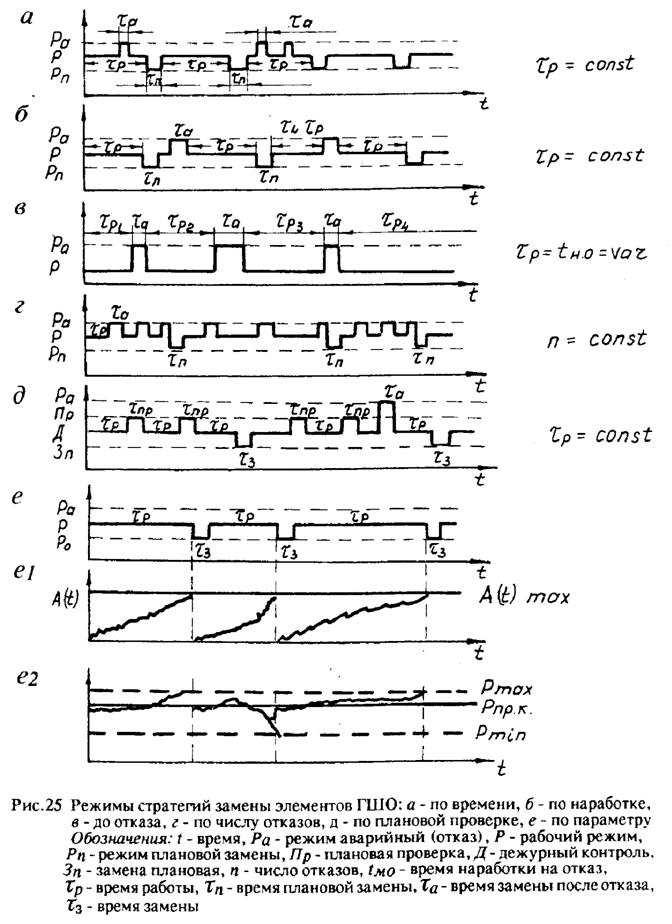
Стратегия «по отказу» (рис.25в)
Применяется при отсутствии планового предупредительного ремонта и является эффективной для элементов, у которых параметр потока отказов ω(t) = const, т. е.
![]() », ч-1
», ч-1
где n(t) и n ּ(t + Δ t) – соответственно число отказов элементов к моментам времени t и t + Δ t.
Ситуация, когда ω(t) = const, означает что вероятность безопасной работы не характеризуется износом или старением элемента, а закон распределения наработки на отказ экспоненциальный, который отражает случайные значения времени наработки на отказ tно, определяемое внезапным отказом. То есть в этом случае P(t) не может служить основой для прогнозирования технического состояния элемента и определением времени проведения его плановой замены.
Примерами подобных отказов являются: порыв тяговой цепи, поломка зубьев рейки БСП, повреждение силового кабеля, сгорание плавкой вставки автомата и др. В этих случаях плановые замены не устраняют случайного отказа, но могут привести к потере в добыче и к временному снижению надежности элемента за счет режима "приработки", при которых ω(t) практически всегда увеличивается.
При данной стратегии необходимо весьма строго соблюдать плановый режим работ по ТОР, уделяя особое внимание ремонтным осмотрам.
Стратегия «по числу отказов» (рис.25г)
Применяется в системах, в которых накопление отказов приводит к существенному изменению ее качества, несмотря на выполнение восстановления. Графически режим данной стратегии представлен на рис.25г, где допустимое число отказов не зависит от времени наработки на отказ τр. Стратегия обычно реализуется в устройствах систем электроснабжения и автоматики. В этих системах также может приниматься стратегия "плановых проверок" (рис.25д) с плановой заменой элемента при nn-ной проверке (на рис. nn = 2) при ее работе в дежурном режиме (Д). Если в процессе дежурного контроля обнаружен отказ (τa), то время очередной плановой замены τр отсчитывается от момента отказа и замены τa.
Стратегия «по параметру»
Является наиболее эффективной и может обеспечить безопасную работу системы при наличии необходимых средств диагностики технического состояния, необходимом и достаточном количестве контролируемых параметров и обоснованном диапазоне их изменения. Замена элементов (период τ3) производится по достижении контролируемым параметром границ допустимого диапазона его изменений. Стратегия предполагает непрерывный или дискретный контроль данного параметра.
Графически система представлена на трех графиках рис. 25е, e1, е2. Время замены τ3 (рис.25е) наступает при достижении амплитуды вибрации A(t) (корпуса подшипника, кресла машиниста и др.) (рис.25е1) максимально допустимой величины A(t)max, или допустимых значений Ртах и Pmin (рис.25е2) - величины давления в предохранительном клапане гидростойки крепи или гидродомкрата при величине настройки предохранительного клапана Рпр. к.
Стратегия «по результатам осмотра»
Эта стратегия широко используется в системе ППР при проведении всех видов работ по ТОР и может быть достаточно эффективной при наличии определенных нормативных контрольных признаков, определяющих техническое состояние оборудования. Эффективность стратегии высока в том случае, если вероятность отказов в период между осмотрами близка к нулю.
Однако, сложность сборки и разборки узлов ГШО, отсутствие средств безразборной диагностики, отсутствие нормативных признаков и критериев предельных состояний элементов значительно снижают ее эффективность.
Поэтому важнейшей задачей для повышения эффективности ТОР при любой стратегии замены элементов является разработка нормативных признаков и средств диагностики технического состояния ГШО.
2.6. Целевая функция технического обслуживания и ремонта
Целевая функция технического обслуживания и ремонта оборудования в процессе его эксплуатации по назначению позволяет обоснованно выбрать основные показатели цели ТОР, которые должны обеспечить необходимый уровень требований, предъявляемых к оборудованию.
В соответствии со структурой технических требований мы можем выразить целевую функцию ТОР через основные показатели трех групп требований.
Первая группа - показатели надежности и эффективности:
вероятность безотказной работы - P(t);
коэффициент готовности - кг;
коэффициент оперативной готовности - ког;
параметр потока отказов - ω(t);
производительность - Q(t);
удельные эксплуатационные затраты - Суд.
Вторая группа - показатели качества системы ТОР:
коэффициент технического использования оборудования - кти
трудоемкость работ по ТОР - Тр;
удельные эксплуатационные затраты на ТОР - Суд. р.
Третья группа - показатели безопасности и условий труда:
вероятность безопасной работы - Pб(t);
показатели уровня вибрации, шума и др. - кi.
Принимая некоторые усредненные условия эксплуатации оборудования и уровня организации и качества работ, можно считать, что все показатели, определяющие целевую функцию зависят от полноты объемов (трудоемкости) проведения работ по техническому обслуживанию и ремонту – Ттор.
Следует отметить, что в данном случае трудоемкость работ по ТОР (в часах, чел.-часах) является качественной функцией, т. е. с увеличением Ттор происходит качественное изменение показателей целевой функции.
В этом случае мы можем записать целевую функцию в виде выражения:
![]()
Но в то же время трудоемкость работ Ттор также является многофакторной функцией и в общем случае может быть представлена в виде:
![]() (107)
(107)
где  – базовая трудоемкость работ по ТОР при заданной целевой функции ;
– базовая трудоемкость работ по ТОР при заданной целевой функции ;
ктс – коэффициент технического состояния оборудования на момент проведения ТОР;
кк – коэффициент уровня квалификации персонала, проводящего ТОР;
кту – коэффициент уровня технической оснащенности работ по ТОР;
кэ – коэффициент условий эксплуатации;
кор – коэффициент уровня организации работ.
Очевидно, что оптимизировать целевую функцию Ртор по всем показателям мы можем в том случае, если выполним условия:

Для качественного анализа модели целевой функции, представленной выражением 106, рассмотрим характер зависимости отдельных показателей от трудоемкости работ по техническому обслуживанию и ремонту оборудования. Эти зависимости представлены на рисунке 26.
Рассмотрение этих зависимостей показывает, что увеличение времени Ттор для показателей надежности P(t), кг, ω(t) до значения времени ![]() обеспечивает рост этих показателей, т. е. идет процесс оптимизации целевой функции по этим показателям.
обеспечивает рост этих показателей, т. е. идет процесс оптимизации целевой функции по этим показателям.
Но с момента ![]() наступает стабилизация этих показателей и дальнейшее увеличение времени на проведение ТОР приведет только к снижению производительности, объема добычи, темпов проходки за счет увеличения затрат времени на ТОР без роста соответствующих показателей.
наступает стабилизация этих показателей и дальнейшее увеличение времени на проведение ТОР приведет только к снижению производительности, объема добычи, темпов проходки за счет увеличения затрат времени на ТОР без роста соответствующих показателей.
Для показателей Q(t), суд, кти, Суд. р, кi существует оптимальные значения времени Ттор, при которых обеспечиваются соответственно максимальные или минимальные значения данных показателей, при которых достигается оптимизация целевой функции.

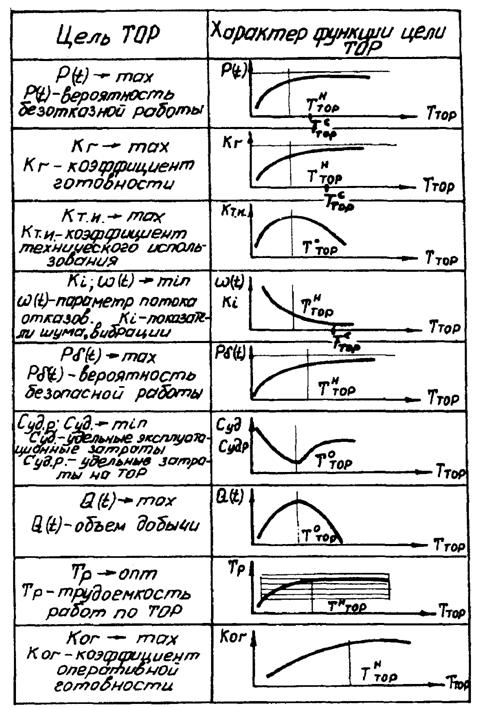 |
На графике Tp=f(Tmop) рациональная величина
Для показателя Pб(t) увеличение времени Ттор будет обеспечивать рост данного показателя с асимптоматическим приближением к величине Pб(t) = 1,0. Но, безусловно, величина Pб(t) определяется нормативными документами по уровню вероятности безопасности.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
