

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Режим измерения
Наступает в тот момент, когда на схеме совпадения селекторный импульс совпадает по времени с импульсом, отраженным от земли. Только в этот момент схема совпадения вырабатывает импульс, амплитуда которого пропорциональна длительности совпадения селекторного импульса с принятым от земли.
Импульс со схемы совпадения поступает на накопитель, где формируется постоянное напряжение, пропорциональное времени перекрытия селекторного и отраженного импульсов. Это напряжение воздействует на генератор медленной пилы, прекращая дальнейшее нарастание его напряжения.
В момент совпадения селекторного импульса с принятым, срабатывает каскад захвата и выдает во внешние цепи сигнал «Захват» в виде напряжения +27В как показатель нормальной работы схемы слежения.
Счетная схема подсчитывает количество импульсов кварцевого генератора, которые успевают пройти через схему «И», управляемую разрешающим триггером, от момента запуска передатчика до прихода поискового импульса. Число импульсов пропорционально измеряемой высоте.
Режим контроля
Режим контроля используется для проверки общей работоспособности радиовысотомера. Перевод РВ в этот режим осуществляется с пульта управления нажатием кнопки «Тест». При этом вместо отраженного сигнала в следящую систему поступает прямой импульс передатчика, задержанный специальной линией задержки, имитируя отраженный от земли сигнал.
Радиовысотомеры больших высот имеют, как правило, отдельные антенны для излучения и приема. Антенны могут быть различных типов: щелевые, уголковые и дипольные.
3.3. Радиовысотомер малых высот А-037
3.3.1. Назначение, основные ТТД, состав А-037
Радиовысотомер А-037 (РВ-5М) предназначен для решения следующих задач:
- измерения истинной высоты ЛА;
- сигнализации об опасной высоте;
- непрерывного контроля собственной исправности.
При решении этих задач РВ выдаёт экипажу и в бортовую систему следующую информацию:
- данные о текущей высоте с индикаторов, снимаемые визуально;
- данные о текущей высоте в виде постоянного напряжения положительной полярности «Выход Н1+»сигнал «Н ОПАСНАЯ» о полёте ЛА ниже опасной, заранее установленной высоты;
- сигнал «Исправность» об исправности РВ и наличии радиолокационного контакта с земной поверхностью;
- флажковую (бленкерную) сигнализацию о неисправной работе РВ или потере радиолокационного контакта с земной поверхностью.
Состав радиовысотомера А-037:
- приемопередатчик ПП-5М (размещён в левом закабинном отсеке);
- указатель высоты УВ-5М (размёщен в кабине ЛА);
- антенны АР 5-1 рупорного типа 2 шт (размещены в подкабинном отсеке);
- амортизационная рама;
- комплект высокочастотных кабелей.
Основные тактико-технические данные радиовысотомера
А-037
1. диапазон измеряемых высот 0…750 м;
2. диапазон рабочих частот передатчика 4200…4400 МГц;
3. выходная мощность передатчика 0,1…0,2 Вт;
4. полоса частотной модуляции 130 МГц;
5. чувствительность приемника - 87 дБ;
6. потребляемая мощность
по сети 27В не более 30 Вт;
по сети 115В 400 Гц не более 14 В×А;
7. масса радиовысотомера не более 8 кг
3.3.2. Принцип действия А-037 по структурной схеме
Принцип действия радиовысотомера поясняется упрощенной функциональной схемой рис.3.5 и графиком рис.3.6.
![]()
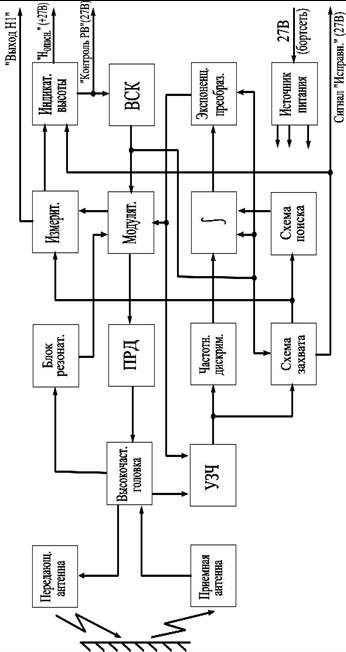
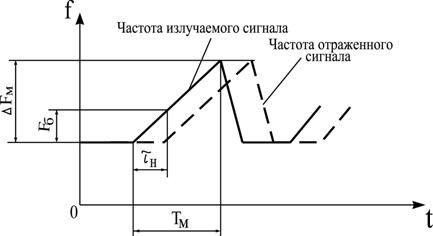
Рис. 3.6. График зависимости частоты сигнала от времени
Частотно-модулированный по несимметричному пилообразному закону сигнал с выхода передатчика через высокочастотную головку поступает в передающую антенну и излучается по направлению к земной поверхности. Отражённый от земной поверхности сигнал поступает в приёмную антенну и поступает на вход смесителя высокочастотной головки.
Одновременно через делитель мощности в высокочастотной головке на другой вход смесителя подаётся часть мощности передатчика в качестве гетеродинного сигнала. В смесителе отражённый и гетеродинный сигналы преобразуются в сигнал разностной частоты (частоты биений).Частота биений Fб связана с временем прохождения высокочастотного сигнала τ и параметрами модуляции соотношением:
 ,
,
где Fб - частота биений Гц; τ=2Низм /с - время распространения излучаемого сигнала до земли и обратно; Δf - полоса частотной модуляции, Гц; Tм - длительность рабочего хода модуляции, с; Низм = Hо+Hт+Hвн – измеренная высота; Hо - остаточная высота, м; Hт - текущая высота, м; Hвн - высота, эквивалентная задержке сигнала в высокочастотных кабелях приёмопередатчика, м.
В данном типе радиовысотомера частота биений поддерживается постоянной. Постоянство частоты биений обеспечивается контуром стабилизации частоты.
Контур стабилизации частоты образован передатчиком, передающей антенной, пространством распространения сигнала при прохождении им расстояния от объекта до земной поверхности и обратно, приёмной антенной, смесителем в высокочастотной головке, цепью обработки сигнала биений, которая включает: усилитель низкой частоты, частотный дискриминатор, интегратор, экспоненциальный преобразователь и модулятор.
Рассмотрим принцип слежения за частотой биений. Сигнал частоты биений, поступающий со смесителя, усиливается усилителем низкой частоты. Его усиление автоматически регулируется с изменением высоты и не зависит от уровня принимаемого сигнала. Для управления усилением частоты биений используется сигнал с экспоненциального преобразователя.
Частота усиленного сигнала биений сравнивается с частотой настройки частотного дискриминатора Fо. Если частота Fб не равна частоте Fо, то на выходе дискриминатора образуется сигнал ошибки, который поступает в интегратор. Интегратор устраняет статическую ошибку в определении равенства частоты Fб частоте Fо и определяет фильтрующие свойства контура стабилизации частоты. Сигнал с интегратора подаётся в экспоненциальный преобразователь, который предназначен для поддержания постоянства коэффициента усиления контура стабилизации частоты в диапазоне измеряемых высот, что улучшает его динамической характеристики. Напряжение с выхода экспоненциального преобразователя подаётся в модулятор, который предназначен для формирования модулирующего напряжения поступающего в передатчик. Под действием сигнала ошибки длительность рабочего хода модулирующего напряжения изменяется таким образом, чтобы свести сигнал ошибки к нулю. В этом случае обеспечивается равенство частот Fб и Fо и следовательно длительность рабочего хода модулирующего напряжения будет пропорциональна измеряемой высоте:
 ,
,
где Fо –частота настройки дискриминатора, Гц.
Из формулы видно, что погрешность высоты будет определяться нестабильностью полосы частотной модуляции Δf. Для уменьшения этой погрешности в радиовысотомере применяются два СВЧ резонатора с высокой добротностью, один из которых настроен на частоту f1, другой – на частоту f2. Разность частот f2 - f1 настройки резонаторов определяет эталонную полосу частотной модуляции f1,f2 (рис.3.7).
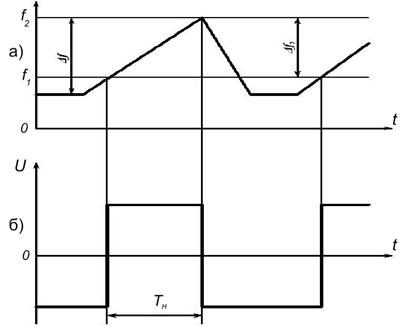
Рис.3.7. Эпюры напряжений, поясняющие принцип формирования
измерительного интервала
Когда частота сигнала передатчика достигнет значения близкого к частотам настройки резонаторов на их выводах образуются сигналы, которые поступают в модулятор для формирования измерительного интервала:
 ,
,
где Kрв = 2Δfэ / (с Fо) - постоянная радиовысотомера, с/м; Tо = Kрв (Hо + Hвн) - длительность измерительного интервала, соответствующая нулевой высоте, с; TT = Kрв Hт - длительность измерительного интервала, соответствующая текущей высоте, с.
Таким образом поддерживание равенства Fб = Fо и постоянство эталонной полосы частотной модуляции Δfэ обеспечивают независимость длительности измерительного интервала от дестабилизирующих факторов.
Измерительный интервал в измерителе преобразуется в напряжение постоянного тока, которое подается в индикатор высоты, схему выдачи разовых сигналов и бортовые системы объекта. Обнаружение сигнала частоты биений осуществляется схемами поиска и захвата.
В режиме поиска интегратор формирует поисковое напряжение (рис. 3.8, а), которое поступает в экспоненциальный преобразователь. Напряжение с выхода экспоненциального преобразователя (рис. 3.8, б) подаётся в модулятор для изменения длительности рабочего хода модулирующего напряжения (рис.3.8, в) до такой длительности, при которой частота биений попадает в полосу пропускания усилителя низкой частоты и схемы захвата.
При этом, если амплитуда сигнала частоты биений превысит некоторый уровень (порог захвата), поиск прекращается, происходит захват сигнала (момент времени t1, рис. 3.8, а) и переход радиовысотомера в режим измерения высоты (режим слежения).
Непрерывный автоматический контроль исправности радиовысотомера осуществляет схема захвата, которая выдает или снимает сигнал «Исправность» в зависимости от работоспособности радиовысотомера и наличия радиолокационного контакта с земной поверхностью.
Встроенная система полуавтоматического контроля осуществляет общий контроль работы радиовысотомера в полете и на земле. По сигналу «Контроль РВ» из индикатора высоты или из внешних систем схема измерителя преобразует эталонную длительность измерительного интервала в напряжение и индикатор высоты отрабатывает контрольную высоту.
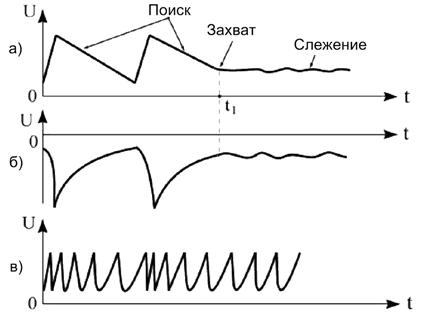
Рис. 3.8.Эпюры, поясняющие работу схем поиска и захвата
Схема выдачи разовых сигналов выдает два разовых сигнала «1РС», «2РС» при полете на высотах ниже высот, предварительно установленных на земле.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
