

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
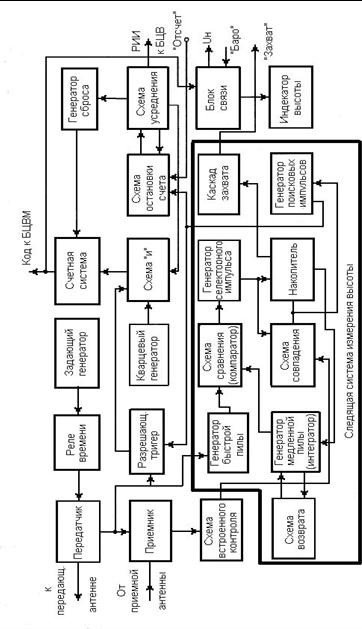
 Рис 2.18 Функциональная схема АРК-У2
Рис 2.18 Функциональная схема АРК-У2
жением местного звукового генератора, преобразуется в напряжение частоты питания двигателя, механически связанного с подвижнойчастью антенного блока. Под действием напряжения управляющей схемы двигатель поворачивает подвижную часть антенного блока до тех пор, пока продольная ось симметрии рамочной антенны не совпадает с направлением прихода принимаемого сигнала. Вращение двигателя через сельсин-датчик передается на указатель курса. Таким образом принцип действия АРК-У2 аналогичен принципу действия средневолнового автоматического радиокомпаса.
Отличие АРК-У2 от средневолнового радиокомпаса состоит в том, что приемная и компасная части устройств конструктивно независимы и могут находиться в различных местах на летательном аппарате.
Работа АРК-У2 для привода при решении задачи встречи самолетов в воздухе, а также привода на аварийную радиостанцию Р-855УМ занимает сравнительно немного времени. Поэтому при выключении АРК-У2 радиостанция может использоваться по прямому назначению.
Для этих целей служит коммутационная коробка, с помощью которой осуществляется подключение приемопередатчика к штатной связной антенне (при работе на связь), либо к антенному блоку АРК-У2 ( в режиме работы на «привод»).
3. Радиовысотомеры
Общие сведения о радиовысотомерах
Высота полета является одним из основных навигационных параметров, информация о которых необходима на всех этапах применения ЛА. Точное определение высоты полета самолета необходимо при выполнении бомбометания, пуска ракет, фотографирования, посадки самолета и т. п. При посадке ЛА высоту необходимо измерять с погрешностью, не превышающей долей метра. При выполнении бомбометания погрешность в измерении высоты должна быть меньше величины вероятного отклонения бомб от цели. Тогда ее влияние на точность бомбометания будет пренебрежительно мала. Для современных условий это соответствует измерению высоты с ошибкой, не превышающей 0,2 … 0,25%. В ряде случаев требуется более высокая точность.
Для измерения высоты на ЛА применяют барометрические высотомеры и радиовысотомеры (РВ). Барометрические высотомеры измеряют высоту полета относительно уровня морской поверхности и имеют значительные погрешности из-за отклонения реальных параметров атмосферы от стандартных, принятых при калибровке. Поэтому они не могут быть использованы в качестве основных измерителей высоты при посадке, бомбометании, фотографировании. Радиовысотомеры измеряют истинную высоту полета, т. е. высоту самолета над реальным рельефом земной поверхности. Их точность измерения практически не зависит от атмосферных условий и значительно выше, чем у барометрических высотомеров. В настоящее время широкое применение получили два типа радиовысотомеров: импульсные радиовысотомеры и радиовысотомеры с частотной модуляцией.
Импульсные радиовысотомеры применяются для измерения больших высот при бомбометании, фотографировании и т. д., так как их относительные погрешности малы и не превышают 0,25% от измеряемой высоты. Измерение малых высот с помощью импульсных радиовысотомеров затруднительно из-за сложности отсчета малого времени запаздывания отражённых сигналов относительно излученных (меньше чем длительность импульсов). Формирование очень коротких импульсов (около долей мкс и менее) сравнительно простыми средствами до настоящего времени проблематично. Обычно в импульсных радиовысотомерах применяются импульсы длительностью t = 0,25 … 0,5 мкс. При такой длительности импульсов минимальная высота, которая может быть измерена импульсным радиовысотомером, равна:
 м,
м,
где с – скорость распространения радиоволн в свободном пространстве, t - длительность импульса.
Поэтому для измерения малых высот применяют радиовысотомеры с непрерывным излучением и частотной модуляцией (РВЧМ). Для измерения больших высот радиовысотомеры с частотной модуляцией не применяются из-за низкой относительной точности. Случайные ошибки таких радиовысотомеров могут составлять до 3% измеряемой высоты.
Исходя из решаемых задач, на самолетах устанавливаются как импульсные радиовысотомеры, так и радиовысотомеры с частотной модуляцией.
3.1. Принципы измерения высоты радиовысотомерами
3.1.1. Принцип действия радиовысотомера с частотной модуляцией
Рассмотрим принцип действия РВ с частотной модуляцией. Он основан на использовании зависимости низкочастотных биений между двумя частотно-модулированными колебаниями (прямым и отраженным сигналами) от высоты полета. Упрощенная функциональная схема РВ с частотной модуляцией приведена на рисунке 3.1.
Генератор сверхвысокой частоты (СВЧ) через передающую антенну излучает по направлению к земле высокочастотные колебания, промодулированные с помощью частотного модулятора. Одновременно колебания от СВЧ генератора подводятся к балансному детектору (прямой сигнал). Отраженный от земли сигнал принимаются приемной антенной, и подводится к балансному детектору.

Рис.3.1.Упрощённая структурная схема РВЧМ
Время запаздывания отраженного сигнала определяется выражением:
 ,
,
где Н - высота полета.
На выходе балансного детектора выделяются низкочастотные биения между прямым и отраженным сигналом. Среднее значение частоты этих биений пропорционально времени запаздывания отраженного сигнала, а следовательно и высоте полета. Усиленные в УНЧ биения поступают в счетный каскад, формирующий постоянное напряжение, пропорциональное частоте биений. Это напряжение измеряется стрелочным прибором постоянного тока, который проградуирован непосредственно в единицах высоты.
Для выяснения связи между измеряемой высотой и частотой биений предположим, что частота СВЧ генератора wп модулируется по симметричному пилообразному закону (сплошная линия), с периодом модуляции.
 ,
,
где Fм – частота модуляции.
На рис.3.2 показаны временные зависимости, поясняющие принцип работы РВ ЧМ. Принятый отраженный сигнал модулирован по частоте wотр по такому же закону, но сдвинут относительно прямого сигнала на время запаздывания tз. На выходе балансного детектора образуются колебания разностной частоты Wб (биений), прямо пропорциональной высоте полета. Таким образом, измерение текущей высоты полета H сводится к измерению средней частоты биений:
 ,
,
где k – коэффициент пропорциональности.
Достоинства радиовысотомеров с частотной модуляцией заключаются в возможности измерения высот при малых мощностях излучения по сравнению с импульсными радиовысотомерами, что значительно снижает массу и габариты аппаратуры.
Основной недостаток таких радиовысотомеров заключается в трудности эффективного разделения излучаемых и принимаемых сигналов, что вызывает необходимость применения двух антенн: приёмной и передающей.
3.1.2. Принцип действия импульсного радиовысотомера
Истинная высота полета в РВ больших высот измеряется импульсным методом. В общем виде принцип построения РВ больших высот подобен принципу построения импульсной радиолокационной станции. Рассмотрим на примере рис.3.3 и 3.4.
Задающий генератор формирует последовательность импульсов, синхронизирующих работу всего высотомера (рис.3.4,а). Эти импульсы поступают на модулятор передатчика, который вырабатывает импульсы длительностью 1 мкс и значительной амплитуды (3 кВ).
При поступлении этих импульсов, высокочастотный генератор формирует радиоимпульсы такой же длительности, которые через передающую антенну излучаются в направлении земли (рис.3.4,б). Энергия радиоволн частично поглощается земной поверхностью, большей частью рассеивается, а часть отраженной энергии попадает в приемную антенну. Принятый сигнал усиливается, преобразуется
по частоте, детектируется и поступает на следящую систему измере-


![]()
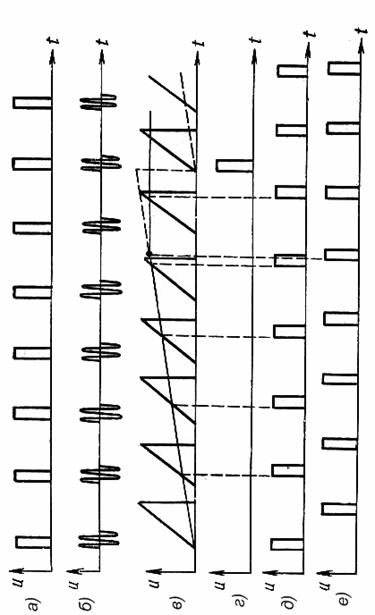
ния высоты.
Радиовысотомер работает в трех режимах: поиска, измерения и контроля.
Режим поиска
Этот режим служит для поиска отраженного от земли импульса. В момент излучения зондирующего импульса запускается генератор быстрой пилы, формирующий импульсы пилообразной формы, которые поступают на схему сравнения. На второй вход этой схемы подается линейно возрастающее напряжение от генератора медленной пилы. Это напряжение изменяется от 0 до 12 В с периодом около 2 с (рис.3.4,в).
В моменты равенства напряжений генераторов быстрой и медленной пилы, схема сравнения запускает генератор селекторного импульса, формирующий импульс, который оказывается задержанным относительно импульса передатчика на время, пропорциональное напряжению генератора медленной пилы в данный момент (рис.3.4,д). Поскольку напряжение генератора медленной пилы плавно возрастает, то задержка селекторного импульса от периода к периоду также плавно возрастает и селекторный импульс перемещается в диапазоне времени от 3 до 200 мкс, что соответствует высоте от 450 м до 30 км.
Если в диапазоне поиска отсутствуют отраженные от земли импульсы и селекторный импульс достигает конца диапазона поиска, то при помощи схемы возврата формируется импульс возврата (рис.3.4,г), который возвращает генератор медленной пилы в исходное состояние, и напряжение начинает снова возрастать.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
