

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
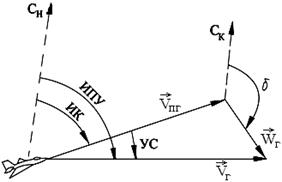
Рис.1.6. Навигационный треугольник скоростей
Проекция путевой скорости на земную поверхность определяет направление линии фактического пути ЛА, а угол между северным направлением меридиана ЛА и линией пути называется истинным путевым углом (ИПУ).
Угол в горизонтальной плоскости между проекцией продольной оси ЛА (вектором ![]() ) и вектором путевой скорости называется углом сноса (УС). Угол сноса отсчитывается от вектора в сторону вектора и считается положительным при отсчете по часовой стрелке и отрицательным при отсчете против часовой стрелки.
) и вектором путевой скорости называется углом сноса (УС). Угол сноса отсчитывается от вектора в сторону вектора и считается положительным при отсчете по часовой стрелке и отрицательным при отсчете против часовой стрелки.
Для полёта в заданном направлении необходимо учитывать влияние ветра (угол сноса) и выдерживать такой курс, чтобы линия фактического пути совпадала с линией заданного пути. Курс с учетом угла сноса, т. е. курс, при котором вектор путевой скорости совмещается с линией заданного пути, называется курсом следования (КС).
Путевая скорость и угол сноса в полёте могут определяться путем решения навигационного треугольника скоростей или непосредственно измеряться с помощью специальных радионавигационных устройств – доплеровских измерителей скорости и сноса.
При решении задач навигации часто приходится определять угловые координаты ЛА относительно известных ориентиров на земле. К числу этих ориентиров относятся всевозможные радионавигационные наземные станции, обеспечивающие определение координат ЛА радиотехническими методами. Пункты установки таких станций называют радионавигационными точками (РНТ). Положение радиостанции относительно ЛА определяется курсовым углом и пеленгом.
Курсовым углом радиостанции (КУР) называется угол в горизонтальной плоскости между продольной осью ЛА и направлением на радиостанцию (рис.1.7). Курсовой угол измеряется с помощью бортовых радиопеленгаторов и отсчитывается от продольной оси ЛА по часовой стрелке в пределах от 0 до 360о .
Пеленгом радиостанции относительно ЛА называется угол в горизонтальной плоскости между северным направлением меридиана ЛА и направлением на радиостанцию. Пеленг может отсчитываться от истинного (географического) или магнитного меридиана. В соответствии с этим он называется истинным пеленгом радиостанции (ИПР) или магнитным (МПР). Истинный пеленг называется также азимутом.
Пеленг и курсовой угол связаны соотношением
ИПР = ИК + КУР, которым обычно пользуются при определении пеленга радиостанции на борту ЛА.
При прокладке линии пеленга на карте обычно пеленг радиостанции пересчитывают в истинный пеленг (ИПС) и отсчитывают от меридиана точки, где расположена пеленгуемая радиостанция. При определении ИПС необходимо учитывать поправку на схождение меридианов, которая берется из таблиц для заданной разности географических долгот места самолета и радиостанции в зависимости
от типа картографической проекции. Истинный пеленг самолета

Рис.1.7. Курсовой угол радиостанции
и пеленг радиостанции связаны соотношением:
ИПС = ИПР + 1800 + ∆ ,
где ∆ - поправка на схождение меридианов.
Местонахождение ЛА может определяться измерением углов между продольной осью (или вертикалью) и направлением на ориентиры или между меридианами ориентиров и направлением на ЛА, а также посредством измерений расстояний до ориентиров или разности расстояний от двух ориентиров.
Обычно дальнейшая обработка результатов таких измерений сводится к определению линий положения ЛА.
Линией положения называется геометрическое место точек, для которых измеряемый навигационный параметр ЛА постоянен. Место ЛА определяется при этом точкой пересечения двух или более линий положения. Такой метод определения местоположения ЛА называется способом линий положения.
Способ линий положения позволяет определять местонахождение ЛА без учета и даже без знания пройденного им ранее пути. Ввиду такого достоинства он получил широкое распространение в навигации и является сейчас одним из основных при определении местонахождения ЛА.
Скорость перемещения ЛА относительно земли может определяться непосредственно с помощью специальных радионавигационных средств, работающих на принципе Доплера, или путем наблюдения за последовательным изменением его координат.
1.4. Классификация и принцип действия РНС
Навигационные радиоэлектронные системы и устройства делятся на следующие типы:
1. По зависимости работы бортового радионавигационного средства от наземных радиотехнических средств.
- автономные радионавигационные средства (радиовысотомеры, ДИСС, панорамные РЛС и др.);
- радионавигационные системы (комплекс бортовых и наземных радиотехнических устройств).
2. В зависимости от вида навигационного параметра или по характеру линий положения.
- угломерные навигационные системы (УНС). Линиями положения является локсодромия, ортодромия и линия равных пеленгов;
- дальномерные или круговые системы (ДНС). Линиями положения является малый круг;
- разностно-дальномерные или гиперболические системы (РДНС);
- суммарно-дальномерные или эллиптические системы (СДНС);
- комбинированные, т. е. комбинация из двух перечисленных выше, наиболее широко применяемые угломерно-дальномерные системы используют две линии положения - ортодромию и малый круг.
3. В зависимости от измеряемого параметра электромагнитных колебаний.
- амплитудные, где чаще используется зависимость амплитуды принятых электромагнитных колебаний от направления на РНТ;
- фазовые, в которых используется зависимость фазы электромагнитных колебаний от направления на РНТ или от дальности до РНТ;
- частотные, где используется зависимость частот принятых колебаний от дальности;
- импульсные или временные, в которых измеряемым параметром является время распространения высокочастотного импульса между ЛА и РНТ;
- комбинированные.
4. В зависимости от навигационного применения.
- радиотехнические системы дальней навигации (РСДН), дальность свыше 500 км;
- радиотехнические системы ближней навигации (РСБН), дальность не более 500 км;
- радиотехнические системы диспетчерского управления полётом в районе аэродрома;
- радиотехнические системы посадки;
- вспомогательные радионавигационные устройства.
С помощью радионавигационных средств можно измерять направления (углы), расстояния, разности расстояний и скорости перемещения ЛА. В соответствии с этим радионавигационные средства принято подразделять на угломерные, дальномерные, разностно - дальномерные и измерители вектора путевой скорости.
Угломерные радионавигационные средства, в свою очередь, подразделяются на радиопеленгаторы и радиомаяки.
Радиопеленгатором называют радиоприемное устройство, предназначенное для определения направлений (пеленгов) на источники радиоизлучения.
Радиомаяком называют радиопередающее устройство, по сигналам которого с помощью бортового радиоприемника можно определять направление на радиомаяк или от него.
Линией положения ЛА при использовании угломерных систем является ортодромия (рис.1.8), проходящая через местонахождение радиопеленгатора (или радиомаяка) P и местонахождение ЛА М. На сравнительно небольших расстояниях ортодромия представляет собой радиальную прямую линию равных пеленгов.
Линией положения ЛА при использовании дальномерных радионавигационных средств является линия равных расстояний (рис 1.9) , представляющая собой окружность с радиусом, равным измеренному значению дальности Д.
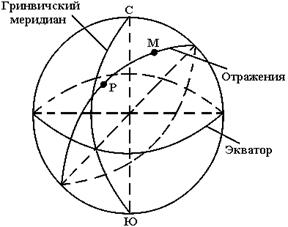
Рис.1.8 Линия положения угломерной системы
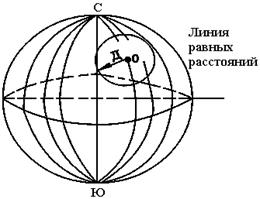
Рис.1.9. Линия положения дальномерных систем
Линией положения ЛА при использовании разностно-дальномерных систем является линия равных разностей расстояний, представляющая собой на плоскости гиперболу, в фокусах которых расположены наземные станции, относительно которых фиксируется постоянная разность расстояний (рис.1.10).
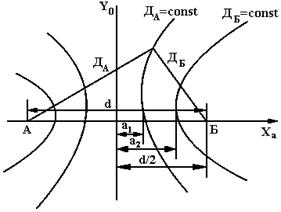
Рис.1.10. Линия положения разностно-дальномерных систем
1.5. Навигационные системы отсчёта
В настоящее время в навигации применяется несколько типов навигационных систем отсчёта параметров:
1.Дальномерные радионавигационные системы;
2.Разностно-дальномерные радионавигационные системы;
3.Угломерно-дальномерные радионавигационные системы.
Дальномерные радионавигационные системы.
В основе работы ДНС лежит принцип активной радиолокации с активным ответом. В системе применён импульсный метод радиолокации, который позволяет с большой точностью определить расстояние от ЛА до наземных РНТ. Дальность можно измерять и на ЛА и на земле. В первом случае на ЛА устанавливают запросчик (передатчик), а на земле – ответчик (приёмопередатчик), во втором случае наоборот.
ДНС работают в диапазоне УКВ. Дальность действия при этом зависит от высоты полёта и не превышает нескольких 100 км, поэтому они предназначены для решения задач ближней навигации. Достоинства: высокая точность измерений. Недостатки: низкая помехозащищённость и ограниченная пропускная способность.
Разностно-дальномерные радионавигационные системы.
Принцип действия РДНС основан на измерении разности расстояний от ЛА до двух наземных РНТ. Линиями положения этих систем является гиперболы. Местоположение ЛА определяется как пересечение двух гипербол в фокусах, которых расположены РНТ. Одна из трёх передающих станций является ведущей, две другие – ведомые. Создаётся сетка из семейства гипербол, которые наносятся на штурманские карты.
Достоинства: неограниченная пропускная способность, высокая скрытность работы и большая дальность действия.
Угломерно-дальномерные радионавигационные системы.
Определение местоположения ЛА производится в полярной системе координат, в центре которой установлен всенаправленный азимутальный радиомаяк. Определяются наклонная дальность до ЛА от РНТ и азимут.
1.6. Комплексная обработка навигационной информации
Комплексом бортового радиоэлектронного оборудования (БРЭО) называется совокупность функционально связанных радиотехнических и нерадиотехнических устройств и систем. Которые предназначены для совместной обработки и индикации информации о параметрах всех режимов и этапов полёта ЛА и для выработки сигналов управления самолётом и двигателя, системами вооружения и элементами комплекса в целях обеспечения максимальной эффективности боевых действий.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
