

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где a, b, c – постоянные коэффициенты, зависящие от параметров системы.
Введем оператор дифференцирования  . Тогда уравнение (2.1) может быть представлено в операторном виде:
. Тогда уравнение (2.1) может быть представлено в операторном виде:
 . (2.2)
. (2.2)
В выражении (2.2) полином, стоящий при выходном параметре Y, называется собственным оператором и обозначается Q(p). Полиномы при воздействиях Х и Z называются соответственно операторами управляющего и возмущающего воздействия. Оператор управляющего воздействия обозначим R1(p), а оператор возмущающего воздействия – R2(p). С учётом введенных обозначений уравнение (2.2) примет вид:
 . (2.3)
. (2.3)
Если рассматривается только установившейся режим, то уравнение (2.2) примет вид:
![]() . (2.4)
. (2.4)
Таким образом, уравнение (2.2) описывает как динамику, так и статику САР, а уравнение (2.4) описывает только статику.
В тех случаях, когда система или её составной элемент описывается дифференциальным уравнением не выше 2-го порядка, применяется стандартная форма записи уравнения. Например, имеем САР, содержащую один вход X и один выход Y, которая описывается уравнением
![]() . (2.5)
. (2.5)
Левую и правую часть уравнения (2.5) разделим на коэффициент a2
 . (2.6)
. (2.6)
Введем обозначения  .
.
Тогда уравнение (2.6) примет вид:
![]() . (2.7)
. (2.7)
В уравнении (2.7) параметр Т1 имеет размерность с–2, параметр Т2 – с–1, а параметр К является безразмерным. Выражение (2.7) представляет собой уравнение в стандартной форме, которая является наиболее удобной при дальнейшем анализе динамических процессов. В этом случае собственный оператор Q(p) принимает вид алгебраического уравнения:
 .
.
Следует отметить, что используемый выше оператор дифференцирования p имеет тесную связь с оператором интегрального преобразования Лапласа S, который является комплексной величиной. Как известно, для линейных дифференциальных уравнений с постоянными параметрами при нулевых начальных условиях с точностью до обозначения оператор p соответствует оператору S, т. е. ![]() .
.
Это обстоятельство позволяет использовать для решения уравнений типа (2.1), а также для моделирования САР интегральное преобразование Лапласа.
Напомним, что для отображения Функции f(t) действительной переменной t на комплексной плоскости в виде функции комплексной переменной f(S) выполняется следующим образом:
 ,
,
где S = a + jb.
При этом f(t) называют оригиналом, а f(S) – изображением. Полагают, что функция f(t) обладает следующими свойствами:
– f(t) определена и кусочно-дифференцируема на всей положительной числовой полуоси (0-¥);
– f(t) = 0 при t < 0;
– существуют такие положительные числа M и С, при которых выполняется соотношение:
![]() .
.
Переход от изображения f(S) к оригиналу f(t) (обратное преобразование Лапласа) выполняется следующим образом:
 .
.
Здесь интегрирование производится вдоль любой прямой, которая удовлетворяет условию Re(S) = a0 > С. Символически обратное преобразование Лапласа обозначается в виде:
 .
.
Таким образом, интегральное преобразование позволяет отразить процессы на комплексной плоскости и избавиться от времени.
2.2. Передаточные функции
Понятие «передаточная функция» является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью САР, так как полностью характеризует динамические свойства системы.
Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y(S) к изображению входной величины Х(S), т. е.
 .
.
Учитывая условия ![]() для линейных систем, уравнение (2.3) запишем в следующем виде:
для линейных систем, уравнение (2.3) запишем в следующем виде:
 . (2.8)
. (2.8)
Поскольку для линейных систем можно применить принцип наложения, то будет справедливым выделить следующие два случая:
– сигнал Z(S) = 0, тогда ![]() ;
;
– сигнал X(S) = 0, тогда ![]() .
.
Тогда для любой САР, имеющей входы по управлению и по возмущению, можно определить две передаточные функции:
 ; (2.9)
; (2.9)
 . (2.10)
. (2.10)
Уравнение (2.9) представляет передаточную функцию по управлению, а выражение (2.10) представляет передаточную функцию по возмущению.
Как известно, собственный оператор Q(p) может быть записан в следующем виде:
 .
.
Соответственно оператор управляющего воздействия R1(р) и оператор возмущающего воздействия R2(p) выразим следующим образом:
Следовательно, передаточные функции по управлению и по возмущению представляют собой отношения следующих полиномов:
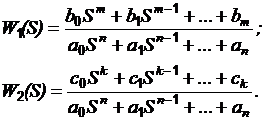
Для физической реализуемости системы необходимо выполнить условие n > m и n > k.
Передаточные функции содержат особые точки на комплексной плоскости – нули и полюса. Полюса – это те значения S, при которых передаточная функция превращается в бесконечность. Для определения полюсов необходимо собственный оператор (знаменатель передаточной функции) приравнять к нулю и произвести решение алгебраического уравнения относительно S. Нули – это те значения S, при которых передаточная функция равна нулю. Для нахождения нулей числитель передаточной функции приравнивается к нулю, и полученное алгебраическое уравнение решается относительно S. В связи с этим передаточная функция может быть представлена как отношение произведений элементарных сомножителей
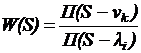 ,
,
где li – полюса передаточной функции; nk – нули передаточной функции.
Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила и методы структурных преобразований.
2.3. Структурные схемы и структурные преобразования
Обычно структурная схема САР состоит из отдельных элементов, соединенных последовательно, параллельно или с помощью обратных связей. Каждый элемент имеет один вход и один выход, и заданную передаточную функцию.
Существуют следующие правила структурных преобразований, позволяющие по передаточным функциям отдельных элементов определить требуемую передаточную функцию.
При последовательном соединении элементов передаточные функции перемножаются. При параллельном соединении передаточные функции суммируются. Правила структурных преобразований при наличии обратных связей представлены на рис. 2.2.

Рис. 2.2. Правила структурных преобразований при наличии обратных связей: а – положительная, б – отрицательная
Рассмотренные правила позволяют для одноконтурных структур САР получить эквивалентные передаточные функции по управлению, по возмущению, по ошибке и разомкнутой САР.
Пусть задана структура одноконтурной САР в виде, представленном на рис. 2.3.
|
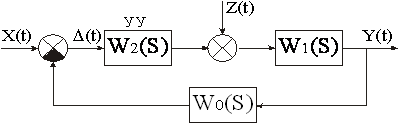
Рис. 2.3. Структурная схема одноконтурной САР
Передаточная функция разомкнутой системы Wp(S) определяется выражением
 .
.
Передаточная функция замкнутой САР по управлению Wy(S) имеет следующий вид
 .
.
Передаточная функция замкнутой САР по возмущению определяется выражением
 .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
