

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
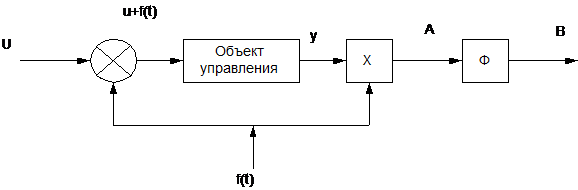
Рис. 6.1. Структура синхронного детектирования
На вход объекта управления, который обладает экстремальной зависимостью y(u), совместно с управляющим воздействием U подается незначительное возмущение в виде регулярного периодического сигнала f(t) = gsinwt, где g > 0 и достаточно мало. На выходе объекта управления получим y = y(u + gsinwt). Полученное значение y умножается на сигнал f(t). В результате сигнал А примет значение
А = yf(t) = y(u + gsinwt)gsinwt.
Предполагая, что зависимость y(u) является достаточно гладкой функцией, ее можно разложить в степенной ряд и с достаточной степенью точности ограничится первыми членами разложения
Y(u + gsinwt) = y(u) + gsinwt(dy/du) + 0,5 g2 sin2 wt (d2 y / du2) + … .
Так как значение g мало, то можно пренебречь членами высшего порядка и в результате получим
Y(u + gsinwt) » y(u) + gsinwt(dy/du).
Тогда в результате перемножения сигнал А примет значение
А = y(u)sinwt + g2 sin2 wt(dy/du).
На выходе фильтра низких частот Ф получим сигнал В
Если постоянная времени фильтра Т достаточно велика, то получим
 ;
;  .
.
Следовательно, сигнал В на выходе фильтра пропорционален производной dy/du
 .
.
Техническая реализация синхронного детектирования для целей экстремального управления сводится к организации движения к экстремуму при наличии информации о производной dy/du с обратным знаком, т. е.
du/dt = –dy/du.
После интегрирования получим управляющее воздействие
 .
.
На основании этого, структуру систему экстремального управления можно реализовать в виде, представленном на рис. 6.2.
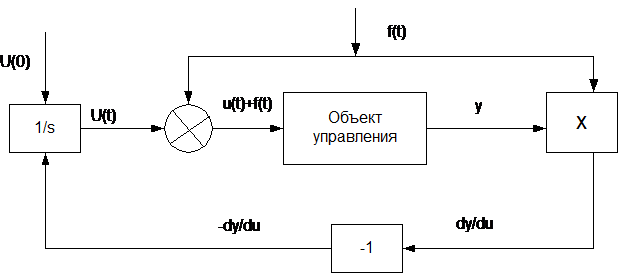
Рис. 6.2 Структура системы экстремального управления
Рассмотренное выше синхронное детектирование с гармоническим синусоидальным возмущением, как метод поиска экстремума, является вполне надежным и эффективным средством экстремального управления для объектов с непрерывными характеристиками.
Сигнал U(0) задает начальные условия интегрирования, т. е. является исходной точкой поиска экстремума.
6.2. Системы оптимального управления
В общем случае система автоматического управления состоит из объекта управления ОУ с рабочим параметром Y, регулятора Р и программатора (задатчика) П (рис. 6.3), вырабатывающего задающее воздействие (программу) для достижения целей управления при условии выполнения качественных и количественных требований. Программатор учитывает совокупность внешней информации (сигнал И).
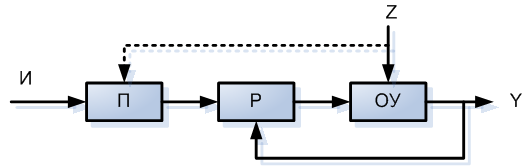
Рис. 6.3. Структура оптимального управления
Задача создания оптимальной системы состоит в том, чтобы для заданного объекта управления синтезировать регулятор и программатор, которые наилучшим образом решают требуемую цель управления.
В теории автоматического управления рассматриваются две родственные задачи: синтез оптимального программатора и синтез оптимального регулятора. Математически они формулируются одинаково и решаются одними и теми же методами. В то же время задачи имеют специфические особенности, которые на определенном этапе требуют дифференцированного подхода.
Система с оптимальным программатором (оптимальное программное управление) получила название оптимальной по режиму управления. Систему с оптимальным регулятором называют оптимальной по переходному режиму. Система автоматического управления называется оптимальной, если оптимальными являются регулятор и программатор.
В ряде случаев считается, что программатор задан и требуется определить только оптимальный регулятор.
Задача синтеза оптимальных систем формулируется как вариационная задача или задача математического программирования. При этом, кроме передаточной функции объекта управления, задаются ограничения на управляющие воздействия и рабочие параметры объекта управления, краевые условия и критерий оптимальности. Краевые (граничные) условия определяют состояние объекта в начальный и конечный момент времени. Критерий оптимальности, который является числовым показателем качества системы, обычно задается в виде функционала
J = J[u(t), y(t)],
где u(t) – управляющие воздействия; y(t) – параметры объекта управления.
Задача оптимального управления формулируется следующим образом: при заданном объекте управления, ограничениях и краевых условиях найти такое управление (программатор или регулятор), при котором критерий оптимальности принимает минимальное (или максимальное) значение.
Задачи оптимального управления относятся к специальным вопросам теории автоматического управления и подробно рассмотрены в источниках [2, 3].
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие принципы управления применяются в автоматических системах?
2. Назовите разновидности и свойства САР.
3. Что такое передаточные функции, особые точки и корневой годограф?
4. Что такое регулятор и закон регулирования?
5. Какими свойствами обладают основные законы регулирования?
6. Что такое временные характеристики систем и элементов?
7. Что такое частотные характеристики систем и элементов?
8. Какие правила структурных преобразований существуют?
9. Разновидности типовых звеньев систем.
10. Позиционные звенья и их свойства.
11. Интегрирующие звенья и их свойства.
12. Дифференцирующие звенья и их свойства.
13. Что такое критерий устойчивости Гурвица?
14. Что такое критерий устойчивости Михайлова?
15. Что такое критерий устойчивости Найквиста?
16. Назовите основные оценки качества систем.
17. Какие существуют методы повышения устойчивости и качества систем?
18. Укажите основные особенности анализа нелинейных систем.
19. Какова структура и особенности процессов в цифровых системах управления?
20. Что такое системы экстремального управления?
21. Какие существуют методы экстремального управления?
22. Что такое системы оптимального управления?
Заключение
Учебное пособие содержит основные разделы классической теории автоматического управления, включающие: математическое описание систем; передаточные функции; временные и частотные характеристики; структурные преобразования; критерии устойчивости; методы повышения устойчивости и качества. Рассмотрены основные типовые динамические звенья, их свойства, частотные и временные характеристики.
Отдельно рассматриваются нелинейные системы, системы цифрового управления, задачи экстремального и оптимального управления. Представленный материл позволяет производить анализ процессов во временной и частотной областях.
В учебное пособие включен перечень необходимых контрольных вопросов, способствующих формированию навыков в отношении изучения, анализа и моделирования систем автоматического управления различного класса.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Макаров, автоматические системы / , . – М. : Машиностроение, 1982. – 505 с.
2. Теория ав томатического управления / под ред. . – М. : Высш. шк., 1986. – 367 с.
3. Теория автоматического управления / под ред. . – М. : Высш. шк., 1999. – 435 с.
4. Малай, цифрового управления : учеб.-метод. пособие / . – Хабаровск : Изд-во ДВГУПС, 1996. – 50 с.
5. Малай, систем автоматического управления : учеб. пособие / . – Хабаровск : Изд-во ДВГУПС, 2004. – 54 с.
6. Малай, теории и моделирование систем цифрового управления : учеб. пособие / . – Хабаровск : Изд-во ДВГУПС, 2008. – 55 с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
