

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Если система управления является многомерной, то необходимо дополнительно установить аналоговый коммутатор и распределитель. Аналоговый коммутатор устанавливается перед АЦП, а распределитель – перед объектом управления. Во всех случаях ЭВМ предоставляет человеку дополнительное информационное обеспечение, необходимое для эффективного управления технологическими и транспортными процессами.
Наибольший эффект прямого цифрового управления достигается за счет того, что часть функций по обработке и анализу информации об управляемом процессе осуществляется не на предварительной стадии синтеза, а самой системой в процессе эксплуатации. Рассмотрим в качестве примера адаптивную самонастраивающуюся систему, построенную по принципу эталонной модели. Наиболее эффективным способом поддержания экстремального режима самонастраивающихся систем является введение в контур самонастройки модели-эталона. Процессы, протекающие в модели-эталоне, соответствуют задаваемым экстремальным условиям. В результате сравнения динамических процессов, происходящих в реальном объекте, с процессами модели можно подстроить характеристики регулятора таким образом, чтобы эти процессы достаточно близко совпадали. Тем самым обеспечивается действие реальной системы в экстремальном режиме. На рис. 5.2 представлена структура самонастраивающейся системы с моделью-эталоном (М-Э).
|
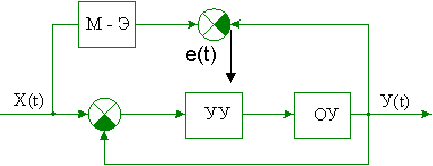
Рис. 5.2. Самонастраивающаяся система с моделью-эталоном
Задающее воздействие x(t) поступает одновременно на вход основного замкнутого контура управления и на вход модели-эталона. В результате сравнения получим сигнал e(t), т. е. отклонение параметра объекта управления y(t) от сигнала модели yМ(t). В зависимости от величины и знака сигнала e(t) происходит изменение параметров УУ основного контура. Эти изменения происходят в соответствии с законами самонастройки, которые позволяют свести к нулю за конечный промежуток времени величину e(t), т. е. привести объект управления в экстремальную точку.
5.2. Дискретизация сигналов по времени и квантование по уровню в системах цифрового управления
Дискретизация по времени является обязательным процессом в цифровых системах управления, что обусловлено дискретной природой самих ЭВМ. Регулируемый параметр объекта управления с помощью датчиков представляется обычно аналоговым сигналом, который с помощью аналого-цифрового преобразователя (АЦП) переводится в цифровую форму. Таким образом, непрерывно изменявшееся во времени состояние объекта управления преобразуется в последовательность чисел, которые обрабатываются ЭВМ. Под обработкой обычно понимается реализация закона регулирования. На выходе ЭВМ получается новая последовательность чисел, которая после преобразования в непрерывный сигнал подается на вход объекта управления. Преобразование в непрерывный сигнал производится с помощью цифроаналоговых преобразователей (ЦАП). Процесс преобразования последовательности чисел в непрерывный сигнал называется восстановлением сигнала. Принцип работы ЭВМ в контуре управления заключается в том, что результаты обработки выдаются на выход в дискретные моменты времени t = 0, T, 2T, …, причем Т = t1 + t2 + t3 + t4, где t1 – время опроса датчиков;
t2 – время выполнения программы; t3 – время выдачи воздействия на объект управления; t4 – резервное время.
В интервалах между решениями на выходе ЭВМ сохраняется то значение сигнала, которое было получено в начале интервала. В некоторых случаях производится также экстраполяция значений сигналов по линейному или квадратичному закону.
Для организации работы ЭВМ в реальном масштабе времени необходимо, чтобы Т не превышало ТЗ, где ТЗ – заданное время выдачи управляющих воздействий. Заданное время ТЗ определяется динамическими свойствами объекта управления. Для определения ТЗ используют аналитические методы теории автоматического регулирования, а также экспериментальные.
Дискретизация сигнала по времени означает простую замену этого сигнала его значениями на множестве дискретных точек. Дискретизация – это линейная операция. Моменты дискретизации в общем случае имеют постоянный период и дискретизация называется периодической. Существуют и более сложные ее способы. Такая дискретизация называется многочастотной и рассматривается как суперпозиция нескольких систем периодической дискретизации.
Кроме дискретизации по времени, для получения цифровой формы производится квантование по уровню. Дискретизация сигналов по времени делает систему дискретной, а квантование по уровню – нелинейной. Необходимо помнить, что процессы дискретизации, квантования и восстановления сопровождаются возникновением методических погрешностей.
Рациональный выбор частоты дискретизации должен основываться на понимании ее влияния на качество систем управления. Вполне естественным является выбор максимальной частоты дискретизации исходя из полосы пропускания замкнутой системы. В этом случае выбор частоты дискретизации производится на основании ширины полосы пропускания или, что то же самое, из времени разгона (времени регулирования) замкнутой системы. Разумные частоты дискретизации в 6–10 раз больше ширины полосы пропускания или от 2 до 3 дискретных отсчетов за время регулирования. Относительно низкие частоты дискретизации могут использоваться при управлении, так как динамические характеристики многих реальных объектов невелики и их постоянные времени обычно больше времени регулирования замкнутой системы.
Квантование сигналов по уровню представляет собой процесс выделения из точно измеренного значения сигнала x(t), дискретного уровня х(nТ), где Т – период дискретизации. Этот процесс можно представить как прохождение непрерывного импульса через элемент с многоступенчатой характеристикой, т. е. через m-разрядный АЦП. Количество ступеней определяется соотношением 2m – 1 и является количеством уровней квантования. Величина шага квантования h определяется соотношением
 .
.
Максимальное значение абсолютной погрешности процесса квантования по уровню принимает значение h.
Нелинейность АЦП, действие которого основано на дискретизации по времени и квантовании по уровню, оказывает существенное влияние на динамические свойства систем. В некоторых случаях наблюдается возникновение периодических режимов и автоколебаний.
6. ЭКСТРЕМАЛЬНЫЕ СИСТЕМЫ И СИСТЕМЫ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
6.1. Адаптивные и экстремальные системы управления
Необходимость в адаптивных (приспособляемых) системах управления возникает в связи с усложнением задач управления при отсутствии практической возможности подробного изучения и описания процессов, протекающих в объектах управления при наличии изменяющихся внешних возмущений. Эффект адаптации достигается за счет того, что часть функций по получению, обработке и анализу процессов в объекте управления выполняется в процессе эксплуатации системы. Такое разделение функций способствует более полному использованию информации о протекающих процессах при формировании сигналов управления и позволяет существенно снизить влияния неопределенности на качество управления. Тем самым адаптивное управление необходимо в тех случаях, когда влияние неопределенности или «неполноты» априорной информации о работе системы становится существенным для обеспечения заданного качества процессов управления. В настоящее время существует следующая классификация адаптивных систем: самонастраивающиеся системы, системы с адаптацией в особых фазовых состояниях и обучающиеся системы.
Класс самонастраивающихся (экстремальных) систем автоматического управления имеет широкое распространение в виду достаточно простой технической реализации. Этот класс систем связан с тем, что ряд объектов управления или технологических процессов обладают экстремальными зависимостями (минимум или максимум) рабочего параметра от управляющих воздействий. К ним относятся мощные электродвигатели постоянного тока, технологические процессы в химической промышленности, различные типы топок, реактивные двигатели самолетов и т. д. Рассмотрим процессы, протекающие в топке при сжигании топлива. При недостаточной подаче воздуха топливо в топке сгорает не полностью и количество выделяемого тепла уменьшается. При избыточной подаче воздуха часть тепла уносится вместе с воздухом. И только при определенном соотношении между количества воздуха и тепла достигается максимальная температура в топке. В турбореактивном двигателе самолета изменением расхода топлива можно добиться получения максимального давления воздуха за компрессором, а следовательно, и максимальной тяги двигателя. При малом и большом расходах топлива давление воздуха за компрессором и тяга падает. Кроме того, необходимо отметить, то обстоятельство, что экстремальные точки объектов управления являются «плавающими» во времени и пространстве.
В общем случае мы можем утверждать о том, что существует экстремум, а при каких значениях управляющего воздействия он достигается – априори неизвестно. В этих условиях система автоматического управления в процессе эксплуатации должна формировать управляющее воздействие, приводящее объект в экстремальное положение, и удерживать его в этом состоянии в условиях возмущений и «плавающего» характера экстремальных точек. Управляющее устройство при этом является экстремальным регулятором.
По способу получения информации о текущем состоянии объекта экстремальные системы являются беспоисковыми и поисковыми. В беспоисковых системах наилучшее управление определяется в результате использования аналитических зависимостей между желаемым значением рабочего параметра и параметрами регулятора. В поисковых системах, которые являются медленнодействующими, нахождение экстремума может быть выполнено различными способами. Наибольшее распространение получил метод синхронного детектирования, который сводится к оценке производной dy/du, где y – регулируемый (рабочий) параметр объекта управления, u – управляющее воздействие. Структурная схема, иллюстрирующая способ синхронного детектирования представлена на рис. 6.1.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
