

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
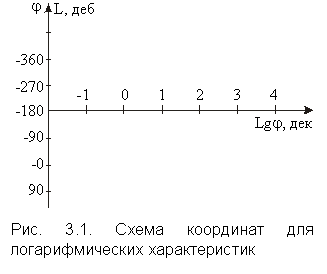
Для упрощения графического определения частотных характеристик, а также для облегчения анализа процессов в частотных областях используются логарифмические частотные характеристики: логарифмическая амплитудная частотная характеристика (л. а.ч. х.) и логарифмическая фазовая частотная характеристика (л. ф.ч. х.). При построении логарифмических характеристик на шкале частот вместо w откладывается lgw и единицей измерения является декада. Декадой называется интервал частот, соответствующий изменению частоты в 10 раз. При построении л. а.ч. х. на оси ординат единицей измерения является децибел, который представляет собой соотношение L = 20 lg M(w). Для л. ф.ч. х. на оси частот используется логарифмический масштаб, а для углов – натуральный масштаб. На практике логарифмические частотные характеристики строятся на совмещённой системе координат, которые представлены на рис. 3.1. При этом L, равное 0 по шкале деб., соответствует –180° по шкале j.
Рассмотрим пример определения и построения АФЧХ для элемента с передаточной функцией
где T = 10–1 с. Путем подстановки p = jw получим частотную передаточную функцию
Преобразуем выражение для частотной передаточной функции (умножение числителя и знаменателя на комплексное сопряженное (1 – jwT)) таким образом, чтобы оно представляло собой комплексное выражение в алгебраической форме: |
|
 ,
, .
.
Задаваясь отдельными значениями w, можно вычислить вещественную и мнимую составляющую W(jw) и построить по ним АФЧХ.
Из выражения для w(jw) видно, что при ![]() , а при
, а при ![]() . Частоты, соответствующие промежуточным точкам кривой, могут быть найдены следующим образом. Аргумент равен
. Частоты, соответствующие промежуточным точкам кривой, могут быть найдены следующим образом. Аргумент равен ![]() , поэтому луч, проведенный из начала координат под углом j к оси абсцисс, пересекает АФЧХ в точке, в которой величина w определяется через j.
, поэтому луч, проведенный из начала координат под углом j к оси абсцисс, пересекает АФЧХ в точке, в которой величина w определяется через j.

3.3. Разновидности типовых звеньев САР и их характеристики
Типовым динамическим звеном САР является составная часть системы, которая описывается дифференциальным уравнением не выше второго порядка. Звено, как правило, имеет один вход и один выход.
По динамическим свойствам типовые звенья делятся на следующие разновидности: позиционные, дифференцирующие и интегрирующие. Позиционными звеньями являются такие звенья, у которых в установившемся режиме наблюдается линейная зависимость между входными и выходными сигналами. При постоянном уровне входного сигнала он на выходе также стремится к постоянному значению.
Дифференцирующими являются такие звенья, у которых в установившемся режиме выходной сигнал пропорционален производной по времени от входного сигнала.
Интегрирующими являются такие звенья, у которых выходной сигнал пропорционален интегралу по времени от входного сигнала.
Звено считается заданным и определенным, если известна его передаточная функция или дифференциальное уравнение. Кроме того, звенья имеют временные и частотные характеристики.
Передаточную функцию любой САР в общем случае можно представить как произведение передаточных функций следующего вида:
 ,
,
где K, n, T, x, t – постоянные величины, причём ![]() ,
, ![]() ,
, ![]() ,
,
0 < x < 1, t > 0.
Эти передаточные функции определяют типовые динамические звенья. Передаточные функции и временные характеристики типовых звеньев приведены в табл. 3.2.
Таблица 3.2
Временные характеристики типовых звеньев
|

Окончание табл. 3.2
|

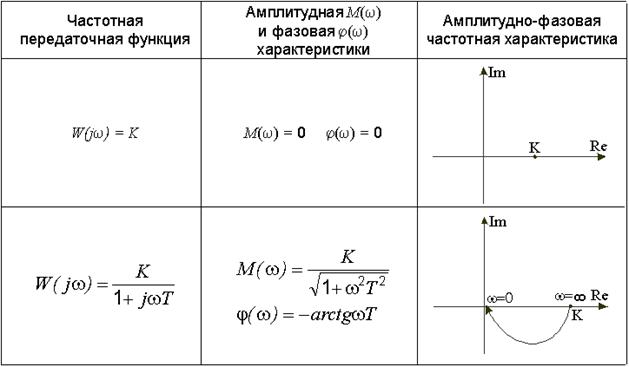
Частотные характеристики типовых звеньев приведены в табл. 3.3.
Таблица 3.3
Частотные характеристики звеньев
Продолжение табл. 3.3
|
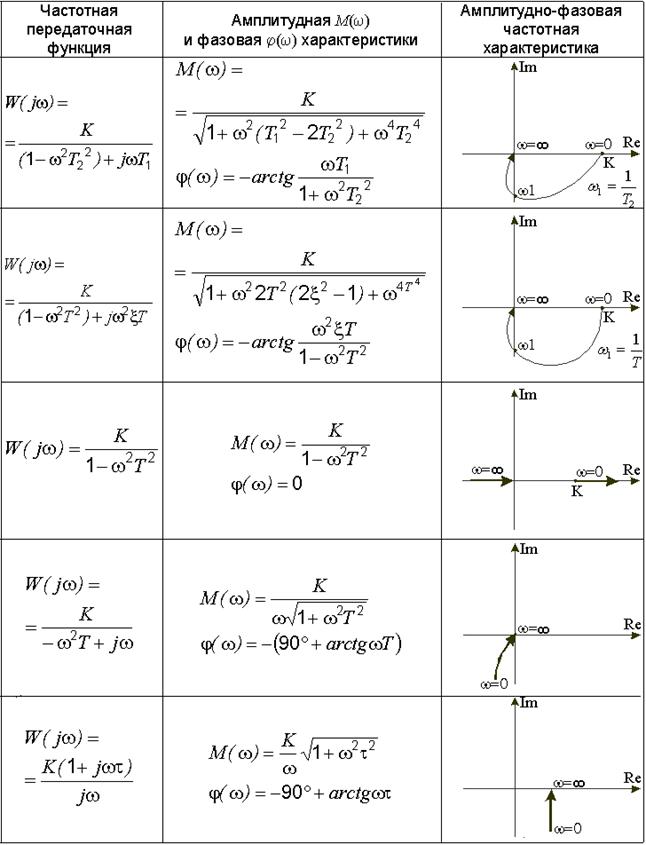
Окончание табл. 3.3
|

В табл. 3.2 и 3.3 указаны лишь характеристики основных типовых звеньев. Кроме того, существуют интегродифференцирующие звенья и неминимально-фазовые звенья. Интегродифференцирующие звенья имеют передаточные функции следующего вида
 ,
,
где k – постоянный коэффициент; R(S) и Q(S) – полиномы от S первого или второго порядков.
К неминимально-фазовым звеньям относятся неустойчивые звенья, передаточные функции которых имеют хотя бы один положительный полюс. Неминимально-фазовыми являются также звенья, которые имеют бесконечное число полюсов в левой части комплексной плоскости. Эти звенья известны под названием звенья чистого запаздывания.
3.4. Процессы в нелинейных системах
В системах управления, наряду с линейными ПИД законами регулирования, применяются нелинейные законы регулирования, среди которых наиболее распространены релейные законы. Релейные законы имеют две разновидности: двухпозиционный закон регулирования и трехпозиционный. При этом система становится принципиально нелинейной. Нелинейными свойствами могут также обладать объекты управления или технологические процессы.
Применение релейных законов регулирования во многих случаях позволяет решить задачу автоматического регулирования простым способом при высоком быстродействии. Релейные законы дают возможность добиться таких результатов, которые принципиально не могут быть достигнуты при помощи линейных регуляторов. Динамический процесс при релейном регуляторе может быть сходящимся к положению равновесия или расходящимся в зависимости не только от значений параметров системы, но и от величины начальных условий. Поэтому исследование динамики нелинейных систем автоматического регулирования более удобно производить с помощью метода фазовой плоскости. Достоинство данного метода заключается в возможности получения достаточно полного решения при высокой точности. Однако исследовать нелинейные системы с помощью построения фазового портрета удобно лишь для систем второго порядка, когда фазовые траектории размещаются на плоскости. Для более высоких порядков фазовые траектории могут быть построены в пространстве, в связи с чем возрастают трудности анализа.
Фазовый портрет систем с релейным законом изображается на плоскости, имеющей две координатные оси. На горизонтальной оси откладывается регулируемый параметр У, а на вертикальной оси – его производная dy/dt, т. е. скорость изменения регулируемого параметра. Характер фазовых траекторий определяется видом исходного уравнения системы, начальное положение точки на фазовой плоскости определяется начальными условиями. Фазовая плоскость с траекториями в целом соответствует общему решению системы и характеризует совокупность всех возможных движений. Построив фазовые траектории, можно проследить, как движется по ним изображающая точка относительно точки покоя. Если изображающая точка с течением времени неограниченно удаляется от точки покоя, соответствующее равновесное состояние неустойчиво. Наоборот, если изображающая точка, независимо от ее начального положения, двигаясь по фазовой траектории, приходит к точке покоя, состояние равновесия устойчиво. Точкой покоя считается изолированная особая точка с координатами у = 0, dY/dt = 0.
Однако применение релейных регуляторов при определенных условиях приводит к возникновению автоколебаний. Автоколебания отличны от свободных колебаний консервативных систем и возникают только в системах существенно неконсервативных, к которым и относятся замкнутые системы цифрового управления. Автоколебания поддерживаются за счет равенства потерь энергии за колебательный цикл притоку энергии от колебательного источника. Таким источником энергии обычно служит объект управления. При этом система, совершающая колебательное движение, сама управляет притоком энергии от источника. Форма и частота автоколебаний определяется параметрами системы. Характерной особенностью автоколебаний является то, что они обычно не исчезают при достаточно малых изменениях начальных условий и параметров системы. Если автоколебания существуют, то они существуют для целой области начальных отклонений. |
|

Разработан и применяется ряд методов определения автоколебаний и устойчивости нелинейных систем. Наиболее простым из них является метод, разработанный . Этот метод является графическим, обладает хорошей наглядностью и сравнительной простотой. Также он может быть использован для приближенного анализа нелинейных систем управления. В этом случае структура системы имеет вид, представленный на рис. 3.3.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
