
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
(1) dq/dt = ch q; (2) dq/dt = (q - а) 2; (3) dq/dt = sin q;
(4) dq/dt х = соs q -1; (5) dq/dt = ch q - 1; (6) dq/dt = sin 2q;
(7) dq/dt = ех; (8) dq/dt = sh2 (q – b).
Упражнение 3. Какие конкретные функции F соответствуют фазовым портретам, изображенным на рис. рис. 7— 10.
(1) dq/dt = Ѕ(q2 - 1) (3) dq/dt = q3
(2) dq/dt = q (4) dq/dt = q2
Задание № 2
ФАЗОВЫЕ ПОРТРЕТЫ И ДИНАМИКА
В различных приложениях дифференциальное уравнение dq/dt = F(q) моделирует изменение какого-нибудь параметра некоторой физической системы в зависимости от времени. Мы говорим, что состояние системы, определяется значением величины q. Например, уравнение
dр/dt = ар; р, а>0, (1.16)
моделирует рост популяции р некоторого изолированного вида. В рамках этой модели состояние вида в момент времени t задается количеством индивидуумов р(t), существующих в момент t. Другой пример — это закон Ньютона для остывания тел. Температура Т тела, остывающего в среде с температурой ф, подчиняется уравнению
dT/dt = - a(T - ф), а>0. (1.17)
Здесь считается, что состояние тела определяется его температурой.
Мы можем изобразить состояние q(t0) нашей модели в любой момент времени t0 точкой на фазовой прямой уравнения dq/dt = F(q). С увеличением времени состояние системы изменяется, и изображающая это состояние точка движется по фазовой прямой со скоростью dq/dt = F(q). Таким образом, динамика физической системы представляется движением фазовой точки по фазовой прямой.
Фазовый портрет фиксирует только направление скорости фазовой точки и, следовательно, отражает лишь качественную картину динамики. Такая качественная информация может оказаться полезной при построении моделей. Например, рассмотрим (1.16) — модель роста изолированной популяции. Заметим, что dр/dt > 0 для всех р > 0, и фазовый портрет на рис. 12 (а) показывает, что популяция растет неограниченно.

Рис. 12 Фазовый портрет для уравнения: dр/dt = ар. Нас интересует только поведение неотрицательных популяций (р>0).
Это свойство выглядит неправдоподобно: та среда, в которой живет этот вид, имеет свои ограничения и не может обеспечить ресурсами неограниченно растущую популяцию.
Предположим, что окружающая среда может обеспечивать существование популяции ре. Как надо изменить уравнение (1.16) с учетом этого обстоятельства? Очевидно, неограниченный рост р должен быть чем-то остановлен. Одна из возможностей — ввести аттрактор ре. Это значит, что популяции, большие чем ре, уменьшаются, меньшие чем ре, растут, а равновесие достигается при р = ре. Чтобы могли существовать две неподвижные точки при р = 0 и р = ре, функция F (р) в (1.16) должна быть нелинейной.
Уравнение
dр/dt = р(а - bр) (1.18)
хорошо тем, что при b = 0 оно сводится к (1.16); в противном случае оно имеет неподвижную точку ре = а/b. Уравнение (1.18) называется логистическим законом роста популяции. (Слагаемое - bр в правой части называется также фактором тесноты.).
Упражнение 4. Какому из фазовых портретов на рис. 11 соответствует качественное поведение следующих автономных дифференциальных уравнений (указать соответствующее значение с)
(1) dq/dt =q, (5) dq/dt =sh q
(2) dq/dt = q3, (6) dq/dt = sh(q – a)
(3) dq/dt = q — а,
(4)dq/dt = (q— а)3
Упражнение 5. Нарисовать фазовый портрет для уравнения dр/dt =
= р (а - bр).
Конечно, часто в моделях физических систем состояние системы определяется более чем одной переменной. Если мы хотим применять качественные идеи к исследованию и таких систем, то мы должны изучить автономные уравнения с более чем одной переменной.
Задание № 3
АВТОНОМНЫЕ СИСТЕМЫ НА ПЛОСКОСТИ
Рассмотрим дифференциальное уравнение
dq/dt = F(q) (1.19)
где q =(q1, q2)— вектор в R2. Такое уравнение эквивалентно системе двух связанных уравнений:
dq1 /dt = F1 (q1, q2), dq2 /dt = F2 (q1, q2), (1.20}
причем F(q) = (F1 (q1, q2), F2 (q1, q2)), так как dq/dt = (dq1 /dt, dq2 /dt). Решение уравнения (1.19) является парой функций (q1(t), q2(t)), удовлетворяющих системе уравнений (1.20). Вообще говоря, решение q1 (t), q2(t) содержит две произвольные постоянные, так что возникает, двупараметрическое семейство решений. Качественное поведение этого семейства определяется тем, как ведут себя q1(t), и q2(t) с увеличением времени. Вместо того чтобы просто указывать на фазовой прямой, увеличивается или уменьшается величина q, мы должны показать, как изменяется положение точки q на фазовой плоскости. Поэтому фазовый портрет будет двумерным, а качественное поведение определяется семейством кривых с указанием направления движения по этим кривым при возрастании t. Такие кривые называются траекториями или орбитами.
Качественное исследование уравнений на плоскости начинается (как и в п. 1.2) с изучения неподвижных точек уравнения (1.19). Неподвижным точкам соответствуют решения вида q(t) = с=(с1, с2), и они возникают в случае, когда
F1 (с1, с2) = 0, F2(c1,с2)= 0. (1.21)
Соответствующая траектория — это точка (с1, с2) на фазовой плоскости. В п. 1.2 «характер» этой особой точки определял фазовый портрет.
Рассмотрим некоторые примеры изолированных неподвижных точек на плоскости с целью определения их характера. На рис. 13 - 16 показаны некоторые из возникающих возможностей.
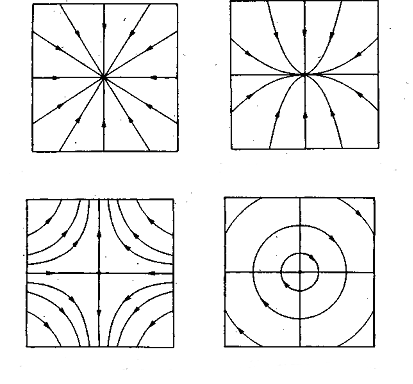
Рис. 13 – 16. Примеры изолированных неподвижных точек на плоскости.
Упражнение 6. Найти неподвижные точки следующих систем дифференциальных уравнений на плоскости:
dq1 /dt = q1 (a - b q2),
dq2 /dt = - q2 (c - dq1); a, b, c, d >0
dq1 /dt = q2
dq2 /dt = - sin q1
dq1 /dt = q2
dq2 /dt = q2 (1- q1 2 ) - q1
dq1 /dt = q1 (2 - q1 - 2 q2)dq2 /dt = q2 (2 - 2 q1 - q2)
(5) dq1 /dt = sin q1
dq2 /dt = cos q2
Библиографический список (к заданиям 1 – 3)
1. Курс лекций по Общей синергетике
2. . Обыкновенные дифференциальные уравнения – М.: Наука, 1971, 240 с.
Задание № 4
УСТОЙЧИВОСТЬ. ПРЯМОЙ МЕТОД ЛЯПУНОВА (ФУНКЦИЯ ЛЯПУНОВА)
В курсе Лекций основным способом исследования поведения нелинейной системы в окрестности одной из её неподвижных точек было применение теоремы о линеаризации. Указанная теорема дает убедительные результаты только в том случае, когда неподвижная точка простая и не является центром. Но в Лекциях было показано, как можно расклассифицировать все неподвижные точки на асимптотически устойчивые, нейтрально устойчивые и неустойчивые. В этой Лабораторной работе рассматривается метод, позволяющий выяснить, когда имеют место эти типы устойчивости.
Предположим, например, что мы хотим исследовать характер неподвижной точки в начале координат для системы
![]()
![]() (4.1)
(4.1)
Здесь нельзя применять теорему о линеаризации, так как ясно, что линеаризованная система не является простой. Однако мы можем показать, что начало координат асимптотически устойчиво, если рассмотреть поведение функции
![]() на траекториях системы (4.1).
на траекториях системы (4.1).
Пусть q(t)![]() произвольная интегральная кривая системы (4.1). Тогда
произвольная интегральная кривая системы (4.1). Тогда
![]() (q(t)) =
(q(t)) =  (4.3)
(4.3)
Поэтому производная ![]() (q(t)) отрицательна во всех точках плоскости
(q(t)) отрицательна во всех точках плоскости![]() , кроме начала координат, так что функция убывает при возрастании t. Действительно, из того, что
, кроме начала координат, так что функция убывает при возрастании t. Действительно, из того, что ![]() (q(t)) < 0 при q(t)
(q(t)) < 0 при q(t)![]() 0, следует, что
0, следует, что ![]() (q(t))
(q(t))![]() 0 при, и, следовательно,
0 при, и, следовательно,
q(t)![]() 0 при
0 при ![]() . Таким образом, начало координат — асимптотически устойчивая неподвижная точка системы (4.1).
. Таким образом, начало координат — асимптотически устойчивая неподвижная точка системы (4.1).
Приведенное выше исследование системы (4.1) является простейшим примером применения функции Ляпунова. Чтобы развить эти идеи далее, нам понадобятся следующие определения.
Определение 4.1. Действительнозначная функция ![]() называется положительно (отрицательно) определенной в V, где V — некоторая окрестность точки
называется положительно (отрицательно) определенной в V, где V — некоторая окрестность точки ![]() , если V(q) > 0 (V(q) < 0) для
, если V(q) > 0 (V(q) < 0) для ![]() V и V (0) = 0.
V и V (0) = 0.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
