
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Определение 4.2. Действительнозначная функция ![]() называется положительно (отрицательно) полуопределенной в V, где V — некоторая окрестность точки
называется положительно (отрицательно) полуопределенной в V, где V — некоторая окрестность точки ![]() , если V(q)
, если V(q) ![]() 0 (V(q)
0 (V(q) ![]() 0) для
0) для ![]() V и V (0) = 0 (Употребляется также термин «неотрицательно (неположительно) определенная функция».)
V и V (0) = 0 (Употребляется также термин «неотрицательно (неположительно) определенная функция».)
Определение 4.3. Производная функции ![]() вдоль параметрически заданной кривой q(t)
вдоль параметрически заданной кривой q(t)![]() определяется как
определяется как
![]() (q(t)) =
(q(t)) = 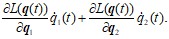 (4.4)
(4.4)
Функция ![]() рассмотренная во вводном примере, положительно определена в R2. Поведение этой функции типично для положительно определенных функций, применяемых в этом параграфе. Любая положительно определенная непрерывно дифференцируемая функция имеет континуум замкнутых линий уровня, окружающих начало координат. Конечно, эти кривые не обязаны быть окружностями (см. рис.4.1).
рассмотренная во вводном примере, положительно определена в R2. Поведение этой функции типично для положительно определенных функций, применяемых в этом параграфе. Любая положительно определенная непрерывно дифференцируемая функция имеет континуум замкнутых линий уровня, окружающих начало координат. Конечно, эти кривые не обязаны быть окружностями (см. рис.4.1).
![]()
![]()
Рис. 4.1. Линии уровня функции ![]() = С для положительно определенной функции
= С для положительно определенной функции ![]() для С = 0,5; 1,0; 1,5..
для С = 0,5; 1,0; 1,5..
При этом если производная ![]() (q(t)) отрицательна
(q(t)) отрицательна
на некоторой траектории, то эта траектория должна все время двигаться к началу координат, так как функция L вдоль траектории убывает. Заметим, что для любой системы ![]()
![]() (q(t)) =
(q(t)) =  (4.5)
(4.5)
зависит только от ![]() и
и ![]() и поэтому часто обозначается просто
и поэтому часто обозначается просто ![]() (q) .
(q) .
Теорема 4.1. (Теорема Ляпунова об устойчивости).
Пусть система ![]() имеет неподвижную точку в начале координат. Если в некоторой окрестности V начала координат существует действительнозначная функция L такая, что
имеет неподвижную точку в начале координат. Если в некоторой окрестности V начала координат существует действительнозначная функция L такая, что
(а) частные производные ![]() ,
, ![]() существуют и непрерывны;
существуют и непрерывны;
(b) L положительно определенная;
(с) ![]() отрицательно полуопределенная,
отрицательно полуопределенная,
то начало координат является устойчивой неподвижной точкой системы.
Если вместо (с) предполагается, что
(с') ![]() отрицательно определенная,
отрицательно определенная,
то начало координат — асимптотически устойчивая неподвижная точка.
Определение 4.4. Функция L, удовлетворяющая предположениям (а), (b), (с) теоремы 4.1, называется слабой функцией Ляпунова. Если (с) заменено на (с'), то L называется сильной функцией Ляпунова.
Упражнение 4.1
Показать, что функция ![]() является сильной функцией Ляпунова в начале координат для каждой из следующих систем:
является сильной функцией Ляпунова в начале координат для каждой из следующих систем:
1. ![]()
![]() ;
;
2. ![]()
![]() ;
;
3. ![]()
![]() ;
;
4. ![]()
![]() ;
;
5. ![]()
![]()
6. Исследовать устойчивость уравнения второго порядка
![]()
в окрестности начала координат на фазовой плоскости с помощью функции ![]()
Указание: свести уравнение к системе первого порядка.
7. Показать с помощью функции ![]() , что начало координат — неустойчивая неподвижная точка для системы
, что начало координат — неустойчивая неподвижная точка для системы
![]()
![]()
Проверить неустойчивость начала, исследуя поведение сепаратрис.
Указание: подберите соответствующим образом постоянные α и β.
Задание № 5
БИФУРКАЦИИ В СИСТЕМАХ
5.1. Несколько простых примеров
В динамические уравнения часто входят кроме динамических переменных также параметры или «константы». Например,
(а) скорость размножения на особь популяции α в уравнении, описывающем рост популяции,
![]() (5.1)
(5.1)
(b) естественная или собственная частота ![]() и постоянная демпфирования k в уравнении гармонического осциллятора
и постоянная демпфирования k в уравнении гармонического осциллятора
![]() ;
;
(c) величина ![]() в уравнении Ван-дер-Поля
в уравнении Ван-дер-Поля
![]() ;
;
это всё параметры.
Мы имеем дело с бифуркацией дифференциального уравнения, если качественное поведение его фазового портрета меняется при изменении параметра (или параметров). Например, для уравнения (5.1, а ) точка q = 0 - аттрактор при ![]() < 0 и репеллер при
< 0 и репеллер при ![]() > 0. Когда
> 0. Когда ![]() возрастает, проходя через нулевое значение, то решения из убывающих превращаются в возрастающие функции от t.
возрастает, проходя через нулевое значение, то решения из убывающих превращаются в возрастающие функции от t.
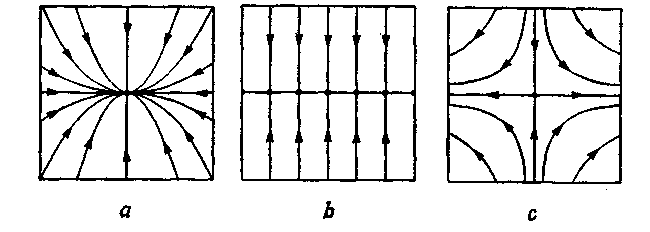
Рис. 5.1. Фазовые портреты для системы с параметром:
![]()
![]() ; а)
; а) ![]() < 0; b)
< 0; b) ![]() = 0; c)
= 0; c) ![]() > 0 .
> 0 .
Говорят, что это дифференциальное уравнение имеет точку бифуркации при ![]() = 0. Аналогично система
= 0. Аналогично система
![]()
![]() ,
,
испытывает бифуркацию при ![]() = 0. Здесь возникают качественно различные фазовые портреты при
= 0. Здесь возникают качественно различные фазовые портреты при ![]() < 0,
< 0, ![]() = 0 и
= 0 и ![]() > 0, как это показано на рис. 5.1. Для любого
> 0, как это показано на рис. 5.1. Для любого ![]() < 0 фазовый портрет является устойчивым узлом; для
< 0 фазовый портрет является устойчивым узлом; для ![]() = 0 — это фазовый портрет непростой неподвижной точки ; для любого
= 0 — это фазовый портрет непростой неподвижной точки ; для любого ![]() > 0 фазовый портрет — седло.
> 0 фазовый портрет — седло.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
