

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Любой из коэффициентов bij (j ≠ i, bij ≠ 0) уравнения (4.3) отображает влияние других каналов управления на i-тый канал, а коэффициенты dik≠0 (k=1,2…m) отображают влияние на этот канал внешних возмущений. Допустим, что на i-тый канал управления наибольшее нежелательное влияние оказывают управляющее воздействие xj (через j-тый канал управления) и внешнее возмущение fk (см. рис. 4.1). Действие возмущений на i-тый канал показано на рис. 4.1 сплошными линиями, так же как и действие основного управляющего воздействия хi через звено прямой связи bii. Компенсацию возмущения от j-того канала проведем посредством формирования компенсирующей перекрестной связи на i-тый канал через звено с коэффициентом передачи kj, а компенсирующее воздействие от возмущения fk подадим через дополнительный канал обратной связи с коэффициентом передачи kfk. Компенсирующие связи, также как канал обратной связи по отклонению с коэффициентом обратной связи ki, показаны на рис. 4.1 штриховыми линиями.
После введения компенсирующих связей по xj и fk, показанных на рис 4.1, уравнение (4.3) преобразуется к виду:
![]() ; i=1, 2,…n; dik= di1, di2,... dim. (4.4)
; i=1, 2,…n; dik= di1, di2,... dim. (4.4)
Чтобы добиться инвариантности i-того канала к возмущениям xj и fk, необходимо обеспечить равенство возмущающих и компенсирующих сигналов, которое выражается, согласно (4.4), соотношениями:
![]() и
и ![]() , (4.4’)
, (4.4’)
где: kj – коэффициент передачи компенсирующей перекрестной связи от j-того на i-тый канал;
kfk – коэффициент передачи компенсирующей обратной связи по k-тому внешнему возмущению, действующему в i-том канале связи.
Поскольку не было наложено никаких ограничений на номер k внешнего возмущения и на номер j соседнего канала управления (кроме j ≠ i), то соотношения (4.4’) пригодны для организации компенсации любых возмущений, воздействующих, согласно уравнению (4.3), на i-тый канал управления. Равным образом, поскольку не были наложены ограничения на номер i рассматриваемого канала управления, то соотношения (4.3) и (4.4) пригодны для организации инвариантного управления любым каналом в рамках АСУТП, управляющей любым ТО, описываемым системой линейных уравнений (4.2).
Общей трудностью при построении инвариантной системы управления является нелинейность как внутренних, так и внешних связей, приводящих к нежелательным отклонениям параметров ТО от заданных значений. Проектирование каналов управления, инвариантных к внешним возмущающим воздействиям, осложняется кроме того трудностями выделения и измерения воздействий такого рода. В качестве примера можно привести трудности учета влияния температуры окружающей среды в различных точках ТО, где она может быть различной и зависеть от различных факторов.
Иногда причины, вызывающие отклонения параметров от заданных значений, обусловлены случайными факторами, влияние которых трудно учесть заранее. Практически невозможно добиться полной инвариантности управляемого техпроцесса по отношению ко всем внешним возмущениям. Поэтому обычно ограничиваются компенсацией основных возмущений, а для нейтрализации остальных возмущающих воздействий вводят отрицательную обратную связь по отклонению управляемого (регулируемого) параметра от заданного значения.
На рис. 4.1 отрицательная обратная связь по управляемому параметру yi реализована посредством звена с коэффициентом передачи ki. Будем считать, что возмущающие воздействия xi и fk скомпенсированы, как показано на рис. 4.1, а остальные возмущения нейтрализуются отрицательной обратной связью. Внешние возмущения представлены на рис.4.1 в виде столбца F, действующего через строку Di матрицы D в соответствии с соотношением (4.3). Аналогично действует столбец Х через строку Bi матрицы В.
Действие отрицательной обратной связи по параметру yi соответствует добавлению члена - biikiyi в правую часть уравнения (4.3). После перенесения этого члена в левую часть уравнения (4.3) получим с учетом введенных обозначений Bi и Di:
![]() ,
,
откуда получим
![]() . (4.5)
. (4.5)
Таким образом, благодаря отрицательной обратной связи по отклонению действие возмущений в любом канале управления может быть уменьшено в 1+biiki раз. При этом нужное значение управляемого параметра yi может быть достигнуто соответствующим увеличением управляющего воздействия xi.
Подход к компенсации внутренних возмущающих воздействий, обусловленных прохождением управляющих сигналов по различным каналам управления, зачастую отличается от подхода к внешним возмущениям. Внешние возмущения являются большей частью неконтролируемыми и всегда нежелательными. Поэтому типичным средством их нейтрализации является отрицательная обратная связь по управляемому параметру. Кроме того, при решении задачи инвариантности к наиболее опасным возмущениям, организуется их измерение и компенсация, как показано на рис. 4.1. Показанная там же аналогичная компенсация соседнего управляющего воздействия xj производится только тогда, когда воздействие соседнего канала на рассматриваемый канал xi является нежелательным, паразитным. Если же это воздействие связано с общей стратегией управления ТО, то оно не компенсируется, а лишь согласуется с другими управляющими воздействиями, формируемыми АСУТП. Примером такого согласования действия каналов управления являются уравнения линейной интерполяции (3.6), см.§3.2. Таким образом, синтез системы управления, обеспечивающей стабилизацию параметров управляемого ТО, приводит к созданию многомерного регулятора, обеспечивающего необходимое качество поддержания заданных значений регулируемых параметров. Он нужен как для статического, так и астатического регулирования с учетом существующих линейных и нелинейных технологических связей.
4.3. Алгоритмы автоматической оптимизации
4.3.1. Статическая и динамическая оптимизация
Оптимизация технологических процессов является основным назначением АСУТП. Уже на стадии проектирования ставится задача обеспечения возможностей оптимизации управляемого техпроцесса в различных направлениях: достижение максимума производительности, минимума себестоимости, требуемого качества продукции, экономии энергии и сырьевых ресурсов и пр. Зависимость между критерием эффективности и параметрами техпроцесса описывается целевой функцией (см. §1.2). Управление техпроцессом должно быть организовано таким образом, чтобы соотношение его параметров соответствовало заданному экстремуму целевой функции или допустимому граничному режиму, близкому к экстремальному. Если оптимальный режим может быть рассчитан заранее и поддерживаться в соответствии с рассчитанными значениями параметров, то такую оптимизацию называют статической, и ее задачи решают методами программного управления. Если же условия функционирования ТО непрерывно меняются и эти изменения трудно оценить заранее, то АСУТП должна вести автоматический поиск оптимального режима. Организацию такого поиска называют динамической оптимизацией.
Реальные техпроцессы зачастую подвергаются возмущениям, имеющим случайный характер и существенно изменяющим характеристики техпроцессов. В результате воздействия различных возмущений режим функционирования технологического оборудования может отклоняться от оптимального несмотря на поддержание управляющих параметров на заданном первоначально уровне. В таком случае возникает задача определения и задания новых значений управляющих параметров, обеспечивающих оптимальный режим в изменившихся условиях. Если эти значения не могут быть по тем или иным причинам определены заранее и заданы программно, то они определяются по ходу техпроцесса по мере отклонения последнего от оптимального режима. В описанных условиях такие отклонения возникают постоянно, так что необходимо вести поиск оптимального режима в течение всего времени техпроцесса. Иными словами, необходимо непрерывно совершать, одну за другой, попытки достижения оптимального режима. Такие попытки носят название шагов оптимизации. Алгоритмы управления, обеспечивающие непрерывный пошаговый поиск оптимального режима, называются алгоритмами автоматической оптимизации.
Методы оптимизации зависят от характера решаемых задач. Если целевая функция линейна и линейны уравнения ограничений, действующих в управляемом техпроцессе, то прибегают к методам линейного программирования. Если целевая функция нелинейна, то применяют преимущественно градиентные методы. Линейное программирование обычно представлено различными модификациями симплексного метода. Чаще всего оно применяется при решении задач экономического характера, являющихся для АСУТП типичными задачами статической оптимизации. Однако возможно применение линейного программирования и для автоматической оптимизации в процессе функционирования ТО, если целевая функция и ограничения техпроцесса являются линейными или могут быть линеаризированы.
4.3.2. Симплексный метод линейного программирования
При поиске оптимального режима симплексным методом целевая функция должна быть представлена в виде
![]() (4.6)
(4.6)
а уравнения ограничений – в виде
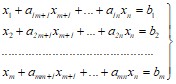 (4.7)
(4.7)
xj≥0 (j=1,2,…n). (4.8)
Принято отображать сомножители произведений, входящих в состав FЦ, в виде векторов-строк
с=[с1, с21,…сn] и х=[х1, х2,… хn],
а коэффициенты и свободные члены в системе уравнений (4.7) – в виде векторов – столбцов
aj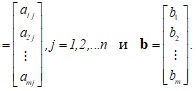
Векторы aj называют векторами условий задачи, а вектор b называют вектором ограничений задачи. Компоненты векторов аj в своей совокупности образуют матрицу.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
