

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Алгоритмы управления АСУТП
4.1. Задачи управления в АСУТП
Для решения основной задачи АСУТП, заключающейся в оптимизации функционирования технологического объекта (ТО), необходимо обеспечить решение ряда частных задач, которые подразделяются на три типа:
стабилизация параметров техпроцесса при различных возмущениях; программное управление технологическим циклом; автоматическая оптимизация техпроцесса в ходе выполнения производственной программы.Решение этих задач описывается алгоритмами, которые мы будем называть алгоритмами управления. Алгоритмы управления определяют порядок подачи управляющих воздействий на исполнительные устройства АСУТП. Они должны обеспечивать программирование работы АСУТП в соответствии с заданным критерием оптимальности (целевой функцией) функционирования управляемого ТО. В зависимости от характера функционирования ТО и его составных частей алгоритмы управления АСУТП делятся на три группы:
алгоритмы стабилизации значений управляющих параметров на уровнях, обеспечивающих оптимальный ход техпроцесса; алгоритмы оптимального программно-следящего управления в рамках технологического цикла; алгоритмы автоматической оптимизации техпроцесса в процессе его реализации.Последние применяются в тех случаях, когда оптимальные параметры техпроцесса не могут быть определены и заданы заранее.
4.2. Алгоритмы стабилизации управляющих параметров
Алгоритмы стабилизации предназначены для поддержания значений параметров АСУТП на заданном уровне. Известны два основных приема стабилизации: по отклонению и по возмущению. При стабилизации по отклонению измеряется отклонение регулируемого параметра от заданного значения, а затем вырабатывается управляющее воздействие, обеспечивающее ликвидацию возникшего по той или иной причине отклонения. Если регулирующее воздействие достаточно действенно, то возникшее отклонение будет в конце концов ликвидировано, но предотвратить отклонение таким способом невозможно, так как регулирующее воздействие формируется только после возникновения отклонения.
При стабилизации по возмущению сигнал, пропорциональный возмущающему воздействию, подается в регулирующее устройство, где преобразуется таким образом, чтобы в месте воздействия возмущения было сформировано управляющее воздействие, равное по величине и противоположное по знаку возмущающему воздействию. В таком случае возмущение оказывается полностью скомпенсированным и не сможет вызвать отклонения регулируемого параметра от заданного значения. Однако такое отклонение может иметь место в силу наличия возмущений какой-либо иной природы. Скажем, если скомпенсировано возмущение электропривода нагрузкой, то отклонение регулируемого параметра данного электропривода от заданного значения может быть вызвано, например, изменением температуры окружающей среды и многими другими факторами. Кроме того, стабилизация параметров АСУТП осложняется дополнительно тем обстоятельством, что АСУТП являются многосвязными системами, у которых изменение одного параметра приводит к изменению многих других взаимно влияющих друг на друга параметров.
Будем считать, что каждый управляемый параметр АСУТП задается особым задающим воздействием (уставкой). Совокупность звеньев АСУТП, ведущих от задающего воздействия к месту формирования параметра, для управления которым предназначено данное задающее воздействие, будем называть каналом управления. Управляемые координаты АСУТП зависят, как правило, не только от значения «своего» управляющего воздействия и внешних возмущений, но и от других управляющих воздействий, предназначенных для управления другими параметрами АСУТП. Управляющие воздействия других каналов управления являются для рассматриваемого канала внутренними (в рамках АСУТП) возмущающими воздействиями. Также и внешние возмущения могут воздействовать на различные каналы управления по-разному. Взаимное влияние каналов управления друг на друга принято учитывать в виде перекрестных связей этих каналов. Модели многоканальных объектов с перекрестными связями представляют собой, как показано в §3.2, многомерные системы, описываемые алгебраическими и дифференциальными уравнениями. Задача стабилизации параметров в многомерной системе решается как путем учета и компенсации возмущений, являющихся причиной отклонения параметров от заданных значений, так и путем ликвидации возникших отклонений.
Многоканальные управляющие системы, в которых с заданной точностью достигается компенсация действия возмущений, называются инвариантными по отношению к компенсируемым возмущениям. Рассмотрим пути достижения инвариантности стабилизируемых параметров АСУТП по отношению к внешним и внутренним возмущениям, считая модель системы автоматизации линеаризованной.
В общем виде систему линейных уравнений, описывающих функционирование технологического объекта удобно (см. §3.2) представлять в матричном виде:
![]() , (4.1)
, (4.1)
где: X – совокупность задающих воздействий ![]() , отображенных в виде матрицы-столбца;
, отображенных в виде матрицы-столбца;
Y – совокупность управляемых параметров ТО ![]() , задаваемых уставками
, задаваемых уставками ![]() и отображенных также в виде матрицы-столбца;
и отображенных также в виде матрицы-столбца;
F – матрица-столбец внешних возмущений ![]() , воздействующих на ТО;
, воздействующих на ТО;
A, Bo и Dо – матрицы исходных коэффициентов, полученных при записи системы уравнений ТО.
При записи системы уравнений (4.1) мы полагали, что каждый параметр yi управляется посредствам собственного задающего сигнала xi, но одновременно испытывает возмущающие воздействия как от некоторых “соседних” задающих воздействий, так и от “соседних” управляемых координат и некоторых внешних возмущений. Следовательно, в рассматриваемом случае количество управляемых координат равно количеству задающих воздействий и исходные матрицы А и В0 являются квадратными матрицами ранга n, где n – количество управляемых координат (параметров). Что касается количества m внешних возмущений fi, то оно не зависит от количества управляемых параметров и определяется лишь свойствами ТО. По этой причине исходная матрица Dо имеет размер n Ч m.
Для решения матричного уравнения(4.1) относительно управляемых параметров Y домножим обе части его на обратную матрицу A-1 и после некоторых преобразований получим:
Y=BX+DF (4.2),
где B=A-1Bo, a D=A-1Do – матрицы того же размера, что и исходные матрицы Во и Do.
Полная инвариантность параметров Y, описываемых уравнением (4.2), к любому возмущению из учтенных нами с помощью матриц B и D или, иными словами, абсолютная стабилизация всех параметров Y будет достигнута, если каждый параметр yi будет строго пропорционален управляющему им задающему воздействию xi. Следовательно, для реализации полной инвариантности параметров Y необходимо соблюдение двух условий:
матрица В должна быть диагональной; матрица D должна быть нулевой, т. е. все ее элементы должны быть равны нулю.Матрица В есть совокупность коэффициентов, связывающих значения управляемых параметров, составляющих вектор Y, с задающими воздействиями, составляющими вектор Х. Ее диагональность означает, что не равны нулю только коэффициенты, связывающие управляемые параметры с собственными задающими воздействиями. Действительно, если выполняются условия инвариантности, то уравнение (4.2) разлагается на следующие простейшие равенства:
y1=b11x1, y2=b22x2, … yn=bnnyn, (4.2’)
свидетельствующие о независимости значений управляемых параметров как от сигналов, управляющих соседними каналами, так и от внешних возмущений. В этих равенствах коэффициенты b11, b22, … bnn – это элементы матрицы В, расположенные по ее диагонали начиная с элемента b11, расположенного в начале первой строки и первого столбца, и до элемента bnn, расположенного в конце последних строки и столбца матрицы В.
В реальных ТО условия инвариантности обычно не соблюдаются. Достижение в необходимых случаях инвариантности по отношению к тем или иным видам возмущений является одной из основных задач проектирования АСУТП. Принцип достижения инвариантности состоит в том, что для компенсации возмущения, действующего в каком-либо канале, формируется дополнительный управляющий канал, по которому проходит компенсирующее воздействие, равное по величине и противоположное по знаку компенсируемому возмущению в точке его приложения. Рассмотрим
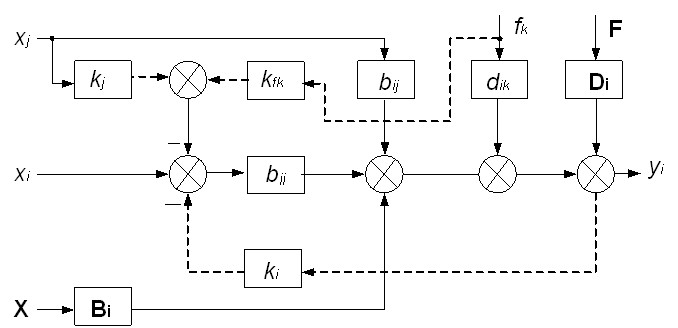
Рис.4.1 Схема реализации i-того канала управления с обратными связями по возмущению и по отклонению:
xi – основное управляющее воздействие i-того канала;
xj – основное управляющее воздействие j-того канала;
X – совокупность остальных управляющих воздействий;
bii – коэффициент передачи i-того канала по основному управляющему воздействию;
bij - коэффициент паразитной перекрестной связи от j-того на i-тый канал управления;
Bi – i-тая строка матрицы B кроме элементов bii и bij, см. соотношения (4.2) и (4.3);
fk – k-тое внешнее возмущение, действующее на ТО;
F – совокупность остальных внешних возмущений;
dik – коэффициент передачи возмущения fk на i-тый канал управления;
Di – i-тая строка матрицы D кроме элемента dik, см. соотношения (4.2) и (4.3);
kj – коэффициент компенсирующей перекрестной связи от j-того на i-тый канал управления;
kfk – коэффициент компенсирующей обратной связи по внешнему возмущению fk;
ki – коэффициент отрицательной обратной связи по регулируемому параметру yi.
(рис. 4.1), каким образом можно организовать компенсацию возмущений, действующих в i-том канале АСУТП, обеспечивающей управление ТО, модель которого представлена матричным уравнением (4.2). В соответствии с (4.2) уравнение i-того канала управления может быть представлено в виде
![]() ; i=1, 2,…n. (4.3)
; i=1, 2,…n. (4.3)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
