

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
фа= tа/Та – относительное время анодного растворения;
фп=tп/Та – относительное время промывки;
фк= tк/Та – относительное время контроля;
Та – постоянная времени загрязнения электролита на стадии анодного растворения.
При оптимизации по методу градиента согласно соотношению (4.18) управляющие параметры фа и фп должны изменяться на каждом шаге оптимизации по следующим правилам:
 ; (4.24)
; (4.24)
 . (4.24')
. (4.24')
Здесь i – это индекс, которым помечены значения параметров и их производных на i-ом шаге оптимизации,
ki – коэффициент, определяющий величину шага.
Очевидно, что чем ближе мы к максимуму vср, тем меньше должны быть изменения значений фа и фп, чтобы избежать рысканья САО в окрестности оптимума. Поэтому значения ki выбирают обратно пропорционально величине vср. А величины производных от vср определяют при помощи факторного анализа (см. § 3.4.2). С этой целью на каждом шаге оптимизации САО производит полнофакторный эксперимент, при котором она задаёт управляющим параметрам фа и фп малые приращения Дфа и Дфп, которые ввиду своей незначительности существенно не влияют на ход техпроцесса. Величина этих пробных приращений всегда одна и та же. С каждым приращением производится один цикл ЭХО. Затем по формуле (4.23) САО производит расчет значений vср, используя данные о ходе ЭХО, полученные по каналам текущей информации. Результаты расчётов на каждом шаге оптимизации, состоящем из четырёх циклов ЭХО, сводятся в таблицу 4.3.
Таблица 4.3.
Номер цикла ЭХО | Время активной стадии | Время промывки | Средняя скорость внедрения в изделие |
1 | фаi | фпi | vсрi1 |
2 | фаi | фпi+Дфп | vсрi2 |
3 | фаi+Дфа | фпi+Дфп | vсрi3 |
4 | фаi+Дфа | фпi | vсрi4 |
Как видно из табл. 4.3., по результатам эксперимента можно вычислить по два приближенных значения интересующих нас производных целевой функции vср. За истинные значения производных САО принимает средние значения, вычисленные по результатам полнофакторного эксперимента:
 ;
;
 .
.
Если подставить полученные значения производных в выражения (4.24), то после соответствующих преобразований получим следующий алгоритм управления, по которому должна действовать САО ЭХО на каждом шаге оптимизации:
 ; (4.25)
; (4.25)
 , (4.26)
, (4.26)
где k1– постоянный коэффициент, учитывающий значение Дфа и другие неизменные параметры САО;
vcpi – среднее значение величины vcp в пределах шага оптимизации:
 . (4.27)
. (4.27)
При работе по алгоритму, описанному в таблице 4.3, и выражениями (4.23)-(4.27), САО ЭХО будет периодически вносить поправки в соотношение фа и фп, удерживая техпроцесс на максимуме производительности. Полнофакторные эксперименты, необходимые для удержания техпроцесса на максимуме производительности, производятся непрерывно, один за другим, а истинное значение производительности определяется формулой (4.27).
Дальнейшее изучение возможностей оптимизации ЭХО будем вести с помощью математической модели ЭХО, решённой относительно скорости vср, являющейся целевой функцией. Исходя из представления об изменении концентрации продуктов электрохимических реакций на каждой стадии ЭХО по экспоненциальному закону, придем к следующему выражению для средней скорости внедрения электролита в изделие:
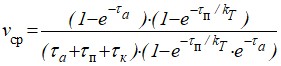 , (4.28)
, (4.28)
где kT=Тп/Та характеризует степень загрязнения электролита: чем больше значение kT, тем больше загрязнение;
Тп – постоянная времени промывки электролита.
При расчёте методом градиента параметров оптимального режима значения целевой функции vср будем вычислять по выражению математической модели (4.28) в соответствии с программой полнофакторного эксперимента, приведённой в таблице 4.3. Затем по формулам (4.25) и (4.26) будем определять значения оптимизированных параметров фа и фп на каждом шаге оптимизации, а по формуле (4.27) – оценивать достигаемое увеличение производительности. Поиск оптимального решения будем вести до тех пор, пока достигаемое на текущем шаге оптимизации увеличение значения vср не станет меньше заданного е в соответствии с неравенством
 . (4.29)
. (4.29)
С помощью увеличения значения kT можно моделировать ухудшение качества электролита в процессе реализации ЭХО и оценить влияние этого ухудшения на производительность и параметры оптимального режима ЭХО.
Пример 4.2. Определить параметры оптимального режима ЭХО методом градиента и оценить влияние ухудшения качества электролита.
Исходные данные: фa0=0,18; фп0=0,88; Дфa=0,036; Дфп=0,072; фк=0,3; k1=1; едоп=0,005.
Определить параметры оптимального режима при kT1=1,8 и kT2=5,8.
Для проведения расчётов на компьютере рекомендуется составить расчётную программу. Величину е необходимо определять исходя из неравенства (4.29) и сравнивать с допустимым значением едоп.
Результаты расчётов приведены в таблицах 4.4. и 4.5.
kT1=1,8 Таблица 4.4
е | − | 0,38 | 0,030 | 0,015 | 0,0091 | 0,0060 | 0,0042 |
фа | 0,18 | 0,388 | 0,437 | 0,472 | 0,499 | 0,521 | 0,539 |
фп | 0,88 | 0,851 | 0,841 | 0,835 | 0,832 | 0,830 | 0,830 |
vср | 0,0974 | 0,1374 | 0,1415 | 0,1436 | 0,1450 | 0,1458 | 0,1464 |
kT2=5,8 Таблица 4.5
е | -0,53 | 0,011 | 0,0087 | 0,0069 | 0,0055 | 0,0045 |
фа | 0,554 | 0,538 | 0,524 | 0,512 | 0,502 | 0,493 |
фп | 0,831 | 0,855 | 0,877 | 0,896 | 0,914 | 0,930 |
vср | 0,0676 | 0,0684 | 0,0690 | 0,0694 | 0,0698 | 0,0702 |
Параметры оптимального режима:
1). kT=1,8; фa=0,539; фп=0,830; vср=0,1464;
2). kT=5,8; фa=0,493; фп=0,930; vср=0,0702.
Прочерк в таблице 4.4 означает, что начальное значение vср (до начала процесса оптимизации) не с чем сравнить. Переход к kT2=5,8, т. е. ухудшение качества электролита, ведёт к резкому уменьшению vср. В действительности же таких резких скачков не случается, так как качество электролита ухудшается постепенно.
4.4.3. Поиск предельно допустимого оптимального режима
Зачастую нужный экстремум целевой функции не может быть достигнут из-за имеющихся технологических ограничений. Тогда оптимальный режим реализуется в одной из граничных точек области допустимых значений параметров техпроцесса. Если ограничения будут заданы в виде линейных неравенств, то напрашивается применение приёма линеаризации целевой функции, присущей методу градиента, в окрестности оптимального режима для сведения решения исходной задачи к линейному программированию.
Целевая функция Fц после линеаризации принимает вид:
 . (4.30)
. (4.30)
Исходя из выражения (4.30) и уравнений линейных ограничений, находят точку оптимального режима xоптл для линеаризованных условий задачи путём линейного программирования, например, симплексным методом, описанным в § 4.3. Полученная точка xотпл не будет, скорее всего, точкой искомого оптимального режима, так как исходная целевая функция Fц является в действительности нелинейной. Истинная оптимальная точка будет находиться у вогнутых функций ближе к исходной рабочей точке xo=(x1o, x2o, … ,xno), а у выпуклых – дальше от неё.
Поэтому новую рабочую точку находят исходя из соотношения
![]() , (4.31)
, (4.31)
где л – коэффициент пропорциональности, определяющий величину шага вычислений.
Величину л (обычно 0 ≤ л ≤ 1) можно определить с помощью процедуры удвоения шага, но лучше начинать с половинного шага, т. е. сначала положить л=1/2, а далее ополовинивать или удваивать шаг до тех пор, пока значение Fц будет изменяться в нужную сторону. Можно также пользоваться приёмами одномерной минимизации (максимизации). После определения значения л вычисляют координаты точки x и соответствующее им значение Fц, которое на первом шаге оптимизации будет, скорее всего, недостаточно близким к оптимальному значению. Если это так, то придётся опять определить проекции градиента от Fц, составить, согласно (4.30), новое значение Fцл и приступить к новому шагу оптимизации, начиная с линейного программирования.
Более универсален метод штрафных функций, при применении которого не требуется соблюдение линейности уравнений ограничений. Применение этого метода рассмотрим на примере определения максимального значения вогнутой целевой функции Fц(x), x=(x1, x2, … , xn) при условиях
gi(x)≤bi (i=1, 2, … ,m), xj≥0 (j=1, 2, … , n),
где gi(x) – линейные или нелинейные выпуклые функции.
Для решения данной задачи формируют штрафную функцию, которая чаще всего имеет вид
![]() , (4.32)
, (4.32)
 ,
,
а ai>0 – весовые коэффициенты.
Далее, вместо непосредственного решения заданной задачи, находят максимальное значение функции
![]()
с помощью рекуррентного соотношения
 kk, (4.33)
kk, (4.33)
причём фигурирующие в соотношении (4.33) частные производные относятся к k-тому шагу оптимизации.
Из (4.33) следует, что если значение xjk находится в пределах допустимых решений исходной задачи, то второе слагаемое в скобках равно нулю (ai=0) и процесс решения идёт обычным методом градиента, ср. с соотношением (4.18). Если же данная точка не принадлежит области допустимых решений, то за счёт второго слагаемого в скобках на последующих итерациях достигается возвращение в область допустимых решений.
Заметим, что динамическая оптимизация в процессе функционирования ТО проводится в условиях задания необходимых ограничений режима работы ТО независимо от ведущегося поиска оптимального режима и с приоритетом над ним. В результате, система управления ТО не выполняет указаний по оптимизации режима работы, если эти указания выходят за рамки запрограммированных ограничений. В качестве примера можно привести токоограничение и ограничение скорости вращения двигателя в электроприводах, запрограммированные независимо от поиска оптимального режима. В этих условиях нет необходимости усложнять алгоритм поиска режима введением ограничивающих условий. Сложные алгоритмы автоматической оптимизации типа метода штрафных функций используются лишь тогда, когда более простые способы введения ограничений режима работы ТО неэффективны. С другой стороны, динамическая оптимизация быстротекущих процессов, в отличие от статической, не прекращается даже в случае достижения точки оптимального режима ввиду постоянных, непрерывно возникающих отклонений от него. Оптимизация техпроцесса в течение его реализации ведется поэтому непрерывно, с высокой периодичностью.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
