


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Предрасчет точности запроектированной сети
Проект геодезических сетей сгущения и съемочных сетей составляется, как правило, на картах масштаба 1 : 5 000 –1 : 25 000. Примерные проекты (схемы) развития планового обоснования приведены в приложениях К–Н. После согласования проекта развития планового обоснования с преподавателем, приступают к оценке точности запроектированной
сети.
Ожидаемые ошибки определения конечных точек каждого хода вычисляют по приведенным ниже формулам:
– для вытянутых ходов
![]() ; (17)
; (17)
– для ломаных ходов
![]() , (18)
, (18)
где mS – средняя квадратическая погрешность измерения длин сторон;
n – число сторон в ходе;
mв – средняя квадратическая погрешность измерения углов;
[S] – сумма длин сторон хода;
D(ц)i– расстояние между точкой хода с номером i и центром тяжести полигонометрического хода.
Для изогнутого теодолитного хода определить коэффициент вытянутости теодолитного хода по формуле (16).
Для изогнутых теодолитных ходов, координаты центра тяжести хода находится по формулам:
![]()
![]() , (19)
, (19)
где ![]() и
и ![]() – сумма координат точек хода, включая исходные пункты;
– сумма координат точек хода, включая исходные пункты;
n+1 – количество точек хода.
Для оценки точности запроектированной сети предварительно вычерчивают схему теодолитных ходов. И если это система теодолитных ходов с узловыми точками, то на ней показывают стрелками ходы между исходным пунктом и узловой точкой и ходы между узловыми точками, например Z1, Z2, Z3 ….
Для одиночного полигонометрического или теодолитного хода предрасчет точности выполнит по формулам (16, 17, 18).
Рассмотрим порядок вычисления ожидаемых погрешностей на примере системы теодолитных ходов с двумя узловыми точками (рисунок 9).
Количество линий n и длины ходов в рассматриваемом примере приведены в таблице 9.
Таблица 9 – Количество линий и длины ходов
Номер хода | Количество линий в ходе | Длина хода, км |
Z1 | 5 | 2,55 |
Z2 | 6 | 1,75 |
Z3 | 7 | 2,20 |
Z4 | 3 | 1,35 |
Примечание – Длина хода находится как сумма длин сторон запроектированного теодолитного хода. Длины сторон измеряются студентом по карте с точностью до 0,05 км. |
Средняя длина линии теодолитных ходов, в приведенном выше примере, получилась равной 380 м.
Для оценки точности определения положений узловых точек I и II в системе ходов (рисунок 9) примем
ms = 15 мм, mв = ![]() .
.
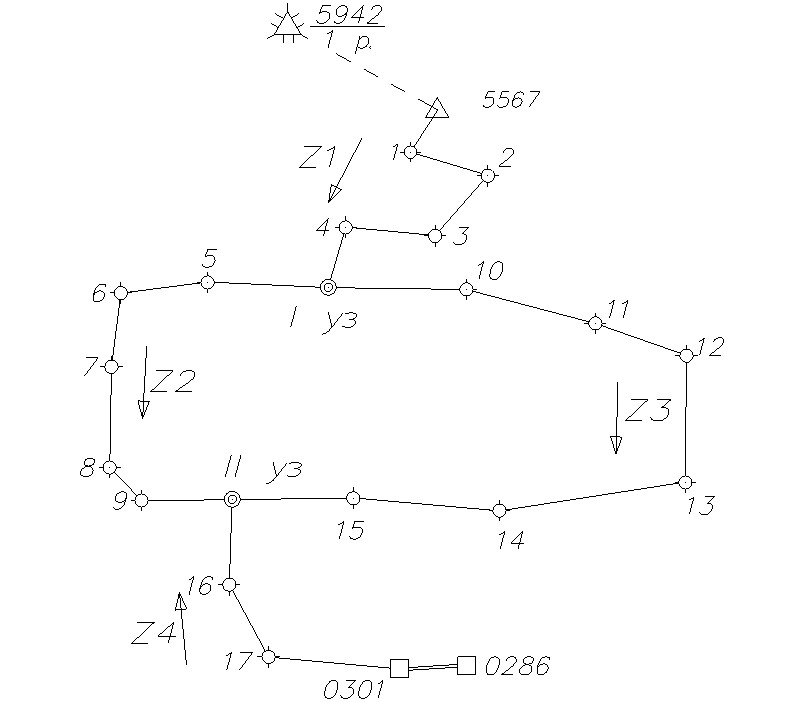
Рисунок 9 – Схема теодолитных ходов
Вычисленные средние ожидаемые погрешности положения конечных точек ходов по формуле (17) представлены в таблице 10.
Таблица 10 – Средние ожидаемые погрешности положения конечных
точек ходов
Номер хода |
|
| М2 | М, мм |
|
Z1 Z2 Z3 Z4 | 1125 1350 1575 675 | 10 189 5 712 10 362 1 692 | 11 314 7 062 11 937 2 367 | 106 84 109 49 | 1 : 24 000 1 : 21 430 1 : 21 100 1 : 24 490 |
Веса определения положения узловой точки I по ходам Z1, Z2 и Z3 вычисляются по формулам:![]()
![]() ;
; ![]() ;
; ![]() (20)
(20)
Принимая С = 100 000, по приведенным в таблице 5 величинам М, получим: Р1 = 9; Р2 = 14; Р3 = 8.
Общий вес определения положения узловой точки I будет ![]() = Р1 + Р2 + Р3= 31, а средняя квадратическая погрешность определится по формуле :
= Р1 + Р2 + Р3= 31, а средняя квадратическая погрешность определится по формуле :
![]() (21)
(21)
или ![]() мм.
мм.
Аналогично для второй узловой точки получим:
Р2 = 14; Р3 = 8; Р4 = 42; тогда ![]() = 64.
= 64.
с учетом (6)
![]() мм.
мм.
Во втором приближении полученные средние квадратические погрешности узловых точек I и II следует учесть как ошибки исходных данных. Следовательно, для узловой точки I получим:
по первому ходу Mz1 = 106 мм и![]() ;
;
по второму ходу![]() мми
мми ![]()
![]() мм;
мм;
по третьему ходу ![]() мми
мми ![]() мм.
мм.
Тогда веса по ходам во втором приближении будут:
РZ1 = 9; РZ2 = 12; РZ3 = 8;
![]() мм;
мм; ![]() мм.
мм.
Для второй узловой точки:
по второму ходу Mz2![]() = 84 мм и
= 84 мм и![]() ;
;
по третьему ходу ![]() мм и
мм и ![]()
![]() ;
;
по четвертому ходу ![]() мм и
мм и ![]() мм.
мм.
РZ2 = 10; РZ3 = 7; РZ4 = 42;
![]() мм;
мм; ![]() мм.
мм.
Приведенные вычисления рекомендуется производить по схеме, представленной в таблице 11.
Так как результаты оценки в третьем приближении практически совпадают с результатами второго приближения, то надобность в последующих приближениях отпадает.
Относительная ожидаемая ошибка по отдельным ходам подсчитывается по формуле:
![]() , (22)
, (22)
![]() , (23)
, (23)
где ![]() – ожидаемая ошибка определения начальной точки хода;
– ожидаемая ошибка определения начальной точки хода;
![]() – ожидаемая ошибка определения конечной точки хода.
– ожидаемая ошибка определения конечной точки хода.
Результаты вычислений ожидаемых относительных ошибок по ходам для рассматриваемого примера приведены в таблице 12.
При оценке точности отдельных теодолитных ходов, в зависимости от изломанности хода, следует пользоваться формулами (17) или (18).
Завершающим этапом проектирования межевой сети теодолитными ходами будет оформление топографической карты и составление проекта (схемы) сгущения планового обоснования в соответствии с требованиями условных знаков (приложение П).
2.3 Проектирование планового обоснования
с применением спутниковых технологий
ГНСС (глобальная навигационная спутниковая система) системы позволяют определять пространственные координаты объектов, используя принцип пространственной обратной линейной засечки, образованной измеренными одновременно расстояниями (далее – псевдодальностями) до нескольких навигационных спутников с одной точки, на которой размещен спутниковый приемник. Координаты навигационных спутников на орбите (далее – эфемериды) являются известными по данным мониторинга их движения наземными станциями слежения. Псевдодальности измеряются по задержке времени прохождения радиосигнала от спутников к приемнику и принятому значению скорости света.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
