


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Точность абсолютных определений местоположения ограничена рядом факторов, среди которых основным является влияние атмосферы на скорость распространения радиоволн, погрешностей часов приемников и эфемерид спутников
Для получения местоположения с более высокой точностью применяется метод относительных определений, который основан на принципе устранения ошибок определения местоположения при одновременном определении псевдодальностей до спутников одного и того же созвездия орбитальных аппаратов с двух точек. Если координаты одной из точек заранее известны, можно вычислить ошибки данных для определения местоположения, полученных по текущим сигналам спутников, и применив их синхронно к данным для определения местоположения в другой точке как коррекцию, можно получить ее уточненные координаты. Такой метод еще называют дифференциальным, а корректирующие данные – дифференциальными поправками.
Дифференциальная коррекция может осуществляться в двух режимах: в режиме реального времени (RTK), когда поправки доставляются с относительной точки к определяемой посредством связи (проводной TCP/IP, радио УКВ, GSM, WiFi…) непосредственно во время измерений, и в режиме с постобработкой, когда данные измерений спутниковых сигналов на обеих точках записываются в память спутниковой аппаратуры и совместно обрабатываются после измерений.
Режим RTK имеет явные преимущества:
– спутниковые измерения в режиме реального времени (RTK) позволяют получать координаты границ объектов прямо в поле без необходимости камеральной обработки данных;
– возможность осуществлять контроль границ, выполнять вынос в натуру утерянных характерных точек объектов.
Спутниковая аппаратура, установленная на точке, относительно которой вычисляются поправки, называют базовой станцией. Базовую станцию с известными координатами, установленной на постоянное место, и снабженного специальным программно–аппаратным комплексом для непрерывного вычисления и передачи дифференциальных поправок, называю постоянно действующей референцной станцией (ССТП). Одна референцная станция может использоваться для формирования поправок нескольким пользователям спутниковой аппаратуры, находящимся на разных точках, точные координаты которых требуется определить. Погрешность полевой спутниковой аппаратуры составляет:
Режим «реального времени» (в плане)
– метод RTK–Real Time Kinematic – 10 мм + 1 мм / км;
– метод DGPS – 0,5 м
Режим «с постобработкой» (в плане)
– метод Static («Статика») – 3 мм + 0,5 мм / км;
– FastStatic («Быстрая статика») – 5 мм + 0,5 мм / км;
– Stop&Go («Стой и иди») – 10 мм + 1 мм / км;
Взаимное положение референцных станций составляет – 10–20 мм в плане;
Погрешность алгоритмов формирования корректирующих спутниковых поправок:
– в постобработке (PP) – 3 мм;
– в режиме реального времени RTK – 10-20 мм;
– в режиме реального времени DGPS – 0,25 м;
– личные ошибки инженера при выполнении измерений:
– ошибки центрирования на точке
– ошибки учета высоты спутниковой антенны
– недостаточное время сеанса измерений.
Суммарная ошибка в плане (без учета личных ошибок исполнителей):
у= урс+уизм+уалг, (24)
где урс– точность взаимного положения референцных станций ССТП (спутниковые системы точного позиционирования);
уизм – погрешности измерений спутниковой аппаратурой в зависимости от метода определений;
уалг – погрешностей алгоритмов формирования корректирующих спутниковых поправок ССТП.
В режиме реального времени (RTK) от одиночной референцной станции: 5 см + 1 мм/км.
В режиме реального времени (RTK) в сети референцных станций: около 5 см.
В режиме реального времени (DGPS) от одиночной референцной станции: около 0,5 м.
В режиме с постобработкой (PP): 3 см + 0,5 мм/км.
Принципиально возможно использование спутниковой геодезической аппаратуры (СГА) и традиционных геодезических средств по следующим направлениям:
1. Геодезические построения на объекте работ, выполненные СГА, и традиционные не имеют между собой никаких связей.
2. Спутниковые и традиционные геодезические построения связаны между собой. При этом возможно три варианта связей:
– развитие сети традиционными методами от пунктов, определенных спутниковыми приемниками;
– развитие сети методами GPS–измерений от пунктов, определенных традиционными методами;
– ступенчатое развитие сетей, при котором спутниковые и традиционные измерения чередуются между собой.
Плотность пунктов создаваемой сети устанавливается в соответствии с действующими инструкциями. В процессе проектирования рекомендуется придерживаться равномерного размещения определяемых пунктов по всему объекту района работ.
При выборе местоположения пункта, проектируемого для ГЛОНАСС и GPS-измерений, необходимо соблюдение следующих требований:
– обеспечение нормальных условий наблюдений;
– отсутствие вблизи пункта (до 1–2 км) мощных источников излучения (теле - и радиопередатчики и т. п.);
– большая часть горизонта вокруг пункта не должна иметь препятствий выше 15°;
– обеспечение долговременной сохранности центра;
– обеспечение удобного подъезда, доступа к пункту в любое время независимо от погодных условий.
На городской территории рекомендуется проектировать пункты на возвышающихся зданиях или в районах малоэтажной застройки.
Проектирование геометрических связей между пунктами производится в соответствии с выбранным методом построения. В методе замкнутых геометрических фигур каждый определяемый пункт должен иметь, как минимум, два независимо измеренных вектора, определяющих его положение. В вытянутых сетях (ходах) для контроля измерений рекомендуется проектировать связи между конечными пунктами сети (хода). Висячие векторы не допускаются.
Для контроля рекомендуется дополнительно измерить векторы между исходными пунктами, что позволит оценить надежность исходной основы.
В проекте определяется местоположение референцных (базовых) станций для сеанса (сессии или группы сеансов) наблюдений. Референцные станции могут располагаться как на исходных пунктах, так и на определяемых. К референцной станции предъявляются повышенные требования в обеспечении нормальных условий наблюдений, так как результаты измерений в сеансе зависят от качества работы референцной станции.
Сеть постоянно действующих спутниковых референцных станций (задается преподавателем) – совокупность постоянно действующих спутниковых (ГНСС) референцных станций, установленных на местности по определенной схеме, объединенные каналами коммуникаций для сбора и обработки спутниковых данных в едином центре, так что бы обеспечивать выполнение измерений и определение пространственного местоположения объектов на обширной площади с одинаковой точностью и в единой системе отсчета времени и пространственных координат.
Графическая часть проекта составляется на картах с указанием местоположения исходных и определяемых пунктов, связей между пунктами проектируемой сети, местоположения референцных станций с использованием условных обозначений и их цветовых соотношений, приведенных в приложении П.
2.4 Производство ГЛОНАСС и GPS–измерений
при создании опорных межевых сетей (ОМС) и межевых
съемочных сетей (МСС)
При выполнении работ необходимо опираться на Руководство пользователя используемого ГЛОНАСС или GPS–приемника. При создании ОМС и МСС кроме статического и быстростатического способов измерений могут использоваться более производительные способы, значительно сокращающие время измерений, – псевдостатический и кинематический, а также их варианты, например наблюдении в режиме реального времени (RТК).
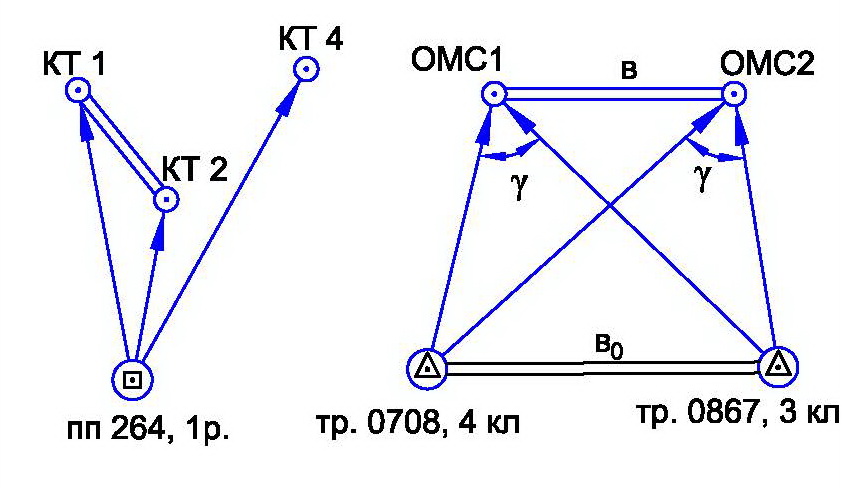
Определение координат пунктов с помощью спутниковой геодезической аппаратуры (СГА) может выполняться следующими методами: лучевым (рисунок 10), сетевым (рисунок 11), совмещенным (рисунок 12).
а) б)
Рисунок 10 – Определение координат пунктов лучевым
(радиальным) методом:
а – из одного референцного пункта; б – из двух референцных
пунктов.
При лучевом методе определяемые пункты координируются с одного опорного пункта рисунок 10, а. Рассматриваемый метод часто называют радиальным. Он широко используется для выполнения топографических съемок в кинематическом режиме. Недостаток лучевого метода заключается в отсутствии контроля определения координат. Для организации такого контроля определяемые пункты при развитии геодезической сети лучевым методом координируются не менее, чем с двух опорных пунктов (рисунок 10, б).
Укажем на важную особенность координатных определений с помощью спутниковой аппаратуры. Пусть определяемые точки ОМС11 и ОМС12 находятся на расстоянии 300 м одна от другой и на удалении ≈ 20 км от опорных пунктов Тр.020 и Тр.0867 (рисунок 10, б). Угол засечки Ƴ примем равным 30°. Пренебрегая ошибками центрирования, вычислим среднюю квадратическую ошибку положения определяемых точек по формуле
![]() (25)
(25)
где mS – ошибка измерения расстояния, в статическом режиме для двухчастотной аппаратуры примем mS = 5 мм + 1 мм · S км = 25 мм.
В результате получим mXY = 71 мм. Средняя квадратическая ошибка взаимного положения пунктов ОМС11 и ОМС12 будет равна:![]()
Что при расстояниях между определяемыми точками 300 м дает относительную ошибку 1 : 3000. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии ОМС11 и ОМС12 как с помощью СГА, так и топографическими светодальномерами.
Сетевой метод спутниковых координатных определений предполагает проведение измерений на каждой линии сети рисунок 11. Это, по сути, аналог трилатерационных построений. При сетевом методе целесообразно использовать несколько одновременно работающих станций. Это позволяет в каждом сеансе наблюдений измерять не только запроектированные линии, но и дополнительные, соединяющие любую пару, участвующих в наблюдениях, приемников. По окончании сеанса часть станций остается на месте, а другие устанавливаются на следующих, согласно проекту, пунктах. В очередном сеансе линии между пунктами первой группы измеряются повторно, что позволяет осуществлять контроль их определения. При значительном числе двойных измерений можно выполнять предварительный контроль качества измерений по их разностям.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
