

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ЭЛЕКТРОМОБИЛИ
МЕТОДИКА РАСЧЕТА РАСХОДОВ НА ПОДГОТОВКУ ПРОИЗВОДСТВА
Перспективные разработки оборудования для автономных энергосистем и тяговых электроприводов
, к. т.н., , к. т.н.
•
Целью разработок является достижение максимальной энергетической и электромеханической эффективности автономных энергосистем (АЭС) и тяговых электроприводов (ТЭП) и снижение стоимости производства и эксплуатационных расходов.
Теоретические (расчетные) основы разработок
Транспортное средство с автономной энергосистемой и тяговым электроприводом (ТЭП) требует организации совместной работы как электрических (электродвигатель, генератор, аккумуляторная батарея), механических (трансмиссия), так и тепловых агрегатов (двигатель внутреннего сгорания). Определение рациональных законов управления ТЭП является многофакторной задачей, решение которой может быть получено при помощи аналитических исследований.
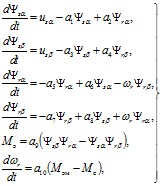
Разработки систем тягового энергетического оборудования, представленные в настоящей статье, базируются на теории электромеханического преобразования энергии в асинхронной машине (АМ) с короткозамкнутым ротором. При этом ключевыми являются уравнения АМ, записанные в векторной форме для неподвижной системы координат статора [1]:

![]()
где ![]() – соответственно векторы потокосцепления статора и ротора;
– соответственно векторы потокосцепления статора и ротора; ![]() – векторы напряжений на обмотках статора и ротора;
– векторы напряжений на обмотках статора и ротора; ![]() – векторы токов в обмотках статора и ротора;
– векторы токов в обмотках статора и ротора; ![]() – вектор электромагнитного момента; Rs, Rr – активные сопротивления обмоток статора и ротора; Ls, Lr – полные индуктивности обмоток статора и ротора; Lm – взаимная индуктивность обмоток статора и ротора (полная индуктивность обмотки статора от основного магнитного потока); ? – угловая частота вращения ротора электрической машины с одной парой полюсов; p – число пар полюсов.
– вектор электромагнитного момента; Rs, Rr – активные сопротивления обмоток статора и ротора; Ls, Lr – полные индуктивности обмоток статора и ротора; Lm – взаимная индуктивность обмоток статора и ротора (полная индуктивность обмотки статора от основного магнитного потока); ? – угловая частота вращения ротора электрической машины с одной парой полюсов; p – число пар полюсов.
Для решения системы уравнений электромеханического преобразования асинхронного двигателя можно воспользоваться уравнениями, записанными относительно потокосцеплений [2]:
где ![]()
![]()
![]()
![]()
![]()
![]() .
.
Токи статора и ротора определяются, исходя из выражений [2]:
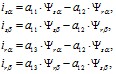
где ![]()
![]()
![]() .
.
Система уравнений электромеханического преобразования энергии при постоянных коэффициентах перед переменными – нелинейная и решается численными методами.
Определение рациональных законов управления электрической машиной
Приведенные выше уравнения асинхронной машины справедливы как для переходных, так и для установившихся режимов работы АМ. Для описания работы АМ в установившемся режиме, а также с нагрузкой, обладающей значительной инерционностью (приведенный к валу момент инерции нагрузки во много раз превышает собственный момент инерции АМ), дифференциальные уравнения электромеханического преобразования энергии могут быть упрощены, что в свою очередь облегчает формулировку основных принципов регулирования работы асинхронной машины. Для этой цели эффективным может быть описание АМ при помощи схем замещения в установившемся режиме позволяющих записать основные зависимости электрических и электромеханических параметров АМ в упрощенной форме, адаптированной к реализации на программном и аппаратном уровне в устройствах управления электроприводом.
На основании аналитических исследований и практического опыта для реализации в системе ТЭП выбран частотно-токовый способ управления с минимизацией потерь энергии в асинхронной тяговом электродвигателе-генераторе (АТД) при реализации тяговых и тормозных режимов.
Алгоритм управления асинхронной машины базируется на математических зависимостях параметров АТД, соответствующих Т-образной схеме замещения.
В пределах напряжений фазы статора U1 < U1макс.
- момент АТД равен:

- максимальная величина момента АТД достигается при заданном токе I1 и оптимальном значении ?опт. = r2/ (xm+ x2:), что реализуется системой автоматического управления КПО в зоне ШИМ.
В пределах напряжений фазы U1 = U1макс.
- момент АТД определяется выражением:

где А(??) = (r12+ xm2?2) ?2 + 2 r1r2:?? + (r12/xm2 + ?2) r22, откуда следует возможность управления величиной М путем воздействия на параметры ? или ? согласно приведенным уравнениям, где М – электромагнитный момент в зазоре АТД; KI, КU - постоянные коэффициенты; Ud - напряжение на входе трехфазного тягового инвертора напряжения; ? - коэффициент модуляции; r1, х1 - активное и индуктивное сопротивление статора АТД; r2 - приведенное активное сопротивление ротора АТД; xm - индуктивное сопротивление цепи намагничивания, ?, ? - частоты токов статора и ротора АТД (отнесенные к номинальному значению частоты тока статора) ? = fl / flн и ? = f2 / flн.
Управление величиной М может быть реализовано принудительным заданием тока статора I1 и абсолютного скольжения f2 посредством автоматической системы управления, выполняющей поддержание заданных величин I1 и f2 с использованием обратных связей по фактическим значениям тока I1 и частоты f вращения вала АМ, при этом текущая величина частоты напряжения фаз АМ определяется согласно зависимости f1 = f · p ± f2, где р – число пар полюсов АМ.
Таким образом реализуется принцип частотно-токового управления АМ во всем диапазоне изменения М и f.
Оптимизация частотно-токового управления основана на принципе автоматического поддержания максимальной величины момента М в функции абсолютного скольжения ?опт. при заданном токе I1. При этом учитывается изменение xm от Im, что приводит к зависимости ?опт. от I1.
С целью упрощения практической реализации функция ?опт. от I1, определяется экспериментально по частным зависимостям М(?), при I1 = I1з – const.
С достаточным приближением может быть принята линейная зависимость ?опт. от I1, при М = Ммакс. в соответствии с уравнением ?опт. = ?0 + k? • I1, где ?0 – начальная величина ?опт.; k? – постоянный коэффициент (k? =??опт /?I1).
Необходимым условием рационального управления асинхронным тяговым электродвигателем-генератором (АТД) в составе ТЭП является формирование трехфазного управляемого напряжения ориентированное на:
- максимальное использование напряжения силового источника постоянного тока;
- максимальное приближение тока фазы к синусоидальной форме;
- снижение коммутационных потерь энергии в силовых вентилях инвертора.
Реализация перечисленных выше факторов может быть достигнута при исполь-зовании двухзонного формирования фазных напряжений инвертора U1, при этом:
В первой зоне, при U1 <U1макс. применяется широтно-импульсная модуляция (ШИМ) длительности импульсов управления силовых транзисторов с её реализацией ШИМ – одновременно по двум фазам. При этом управление верхним и нижним транзисторами в каждой фазе производится поочередно с частотой 4,5 - 5 кГц, а управление величиной U1 осуществляется изменением коэффициента модуляции.
Во второй зоне при U1 = U1макс. применяется амплитудно-ступенчатая модуляция U1 по гармоническому закону (АСМ) при длительности каждой ступени 60 временных градусов.
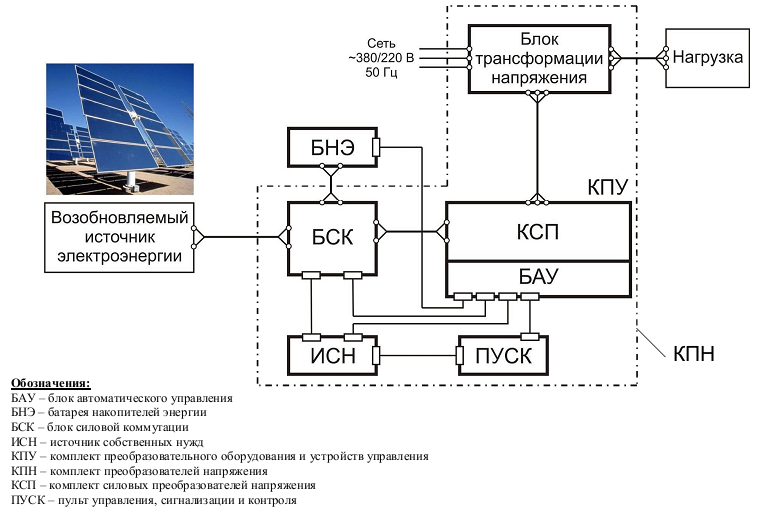
Структурная схема АЭС и ТЭП
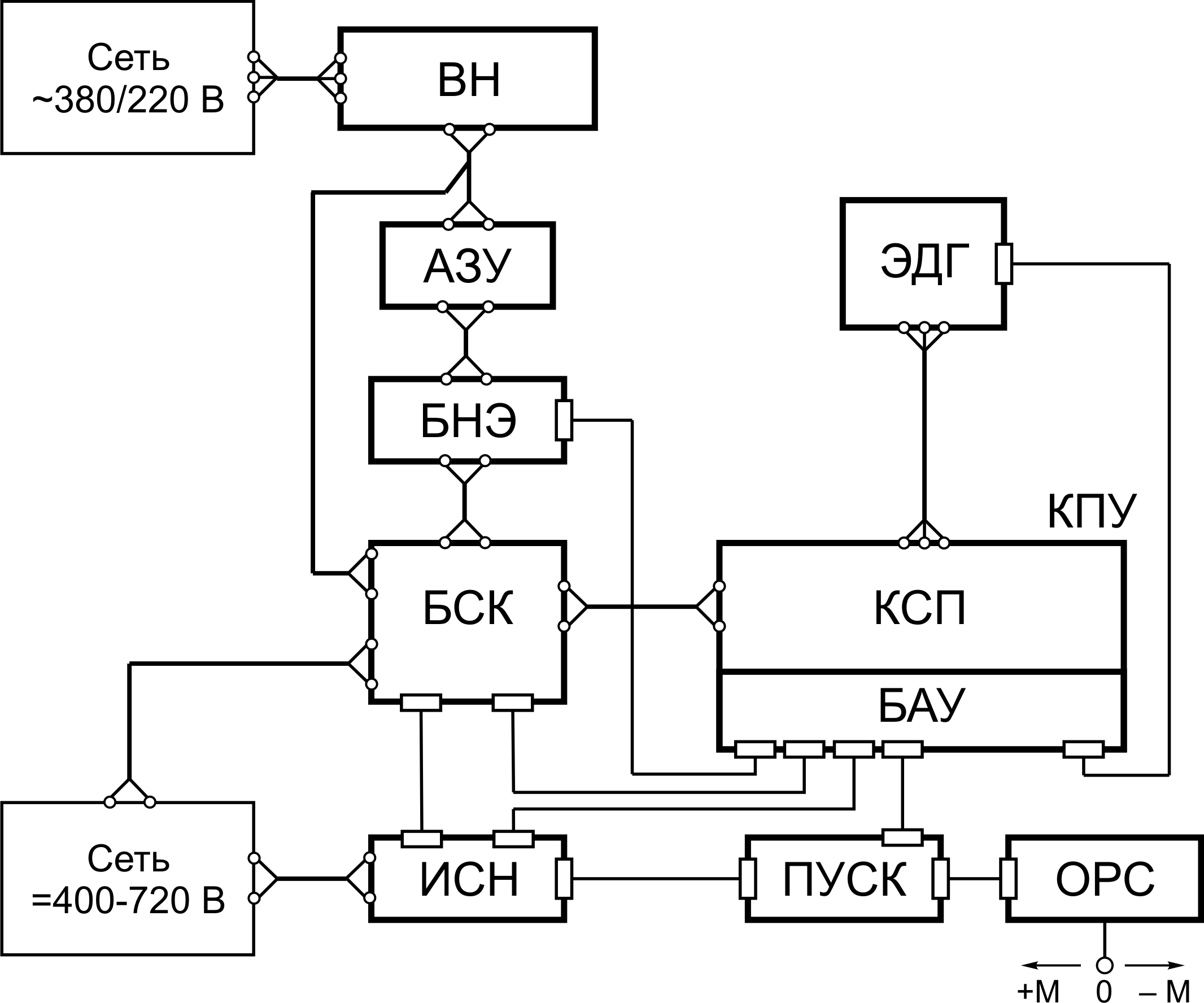
Рис. 1. Структурная схема системы автономного энергообеспечения и ТЭП:
АЗУ – автоматическое зарядное устройство, БАУ – блок автоматического управления, БНЭ – батарея накопителей энергии, БСК – блок силовой коммутации, ВН – выпрямитель напряжения, ИСН – источник собственных нужд, КПУ – комплект преобразовательного оборудования и устройств управления,
КСП – комплект силовых преобразователей напряжения, ОРС – оперативный регулятор скорости,
ПУСК – пульт управления, сигнализации и контроля, ЭДГ – электродвигатель-генератор.
Известные варианты АСМ отличаются длительностью одноразовой коммутации силового вентиля инвертора в пределах периода напряжения фазы.
По условию достижения максимально возможной величины напряжения фазы U1 при заданном Ud, выбран вариант АСМ по гармоническому закону: U1= Ud (cos?n/3), где n – натуральный ряд чисел.
Переход между зонами ШИМ – АСМ реализуется плавно при достижении максимального коэффициента ШИМ.
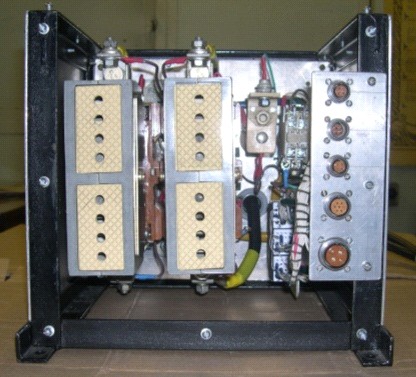
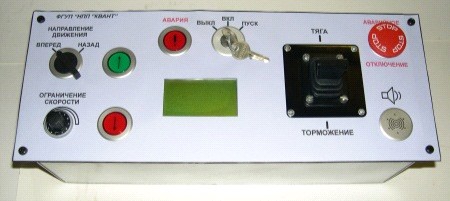
Фотографии отдельных блоков автономных функциональных устройств (АФУ) представлены на рис. 2 ? 4





Функциональные связи АФУ в конструктивном исполнении

![]()






Рис. 5. Схема функциональных связей АФУ.
Объекты практической реализации



МФТС включает комплект силового преобразовательного оборудования, цифровую систему автоматического регулирования тяговыми линейными электродвигателями и пульты оперативного управления движением.
Оценка технико-экономического уровня СТЭО «Квант»
в сравнении с аналогами
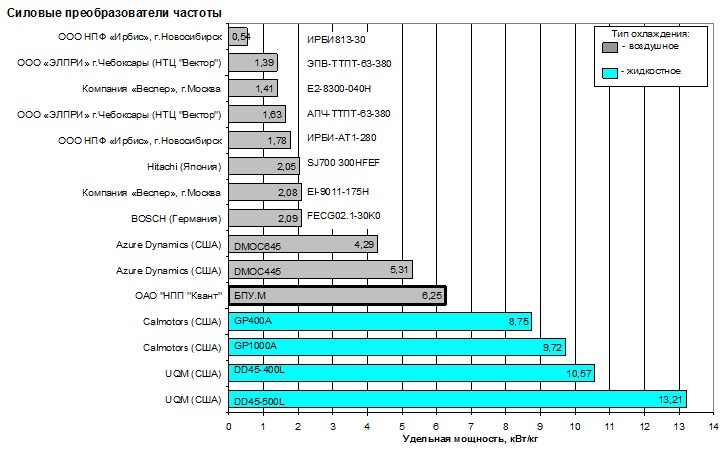
Рис. 10. Характеристики силовых преобразователей частоты отечественного и
зарубежного производства, удельная мощность.
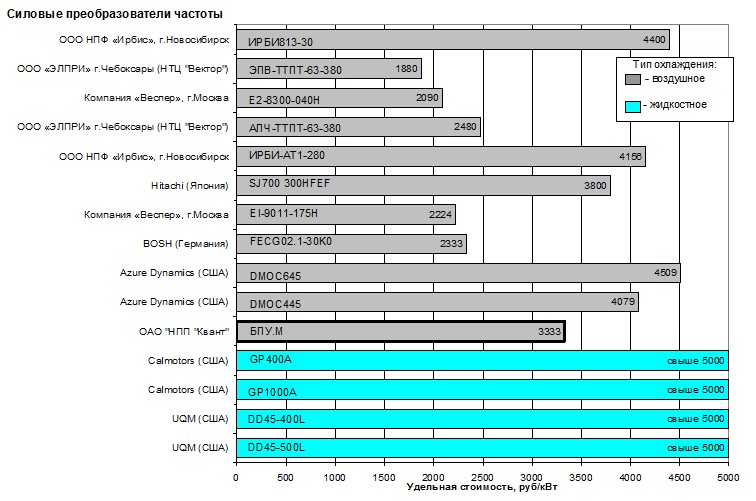
Рис. 11. Характеристики силовых преобразователей частоты.
Литература
1. Ковач процессы в машинах переменного тока / К. П. Ковач, И. Рац; перевод с немецкого А. А. Дартау и В. А. Щедровича; под. ред. . М.- Л.: Госэнергоиздат, 1963. 744 с.2. Математическое моделирование электрических машин: учеб. для вузов / . М.: Высшая школа, 2001. 327с.
_________?_________
Сдано в набор 12.05.2014 г. Подписано в печать 22.05.2014 г.
Формат 60 х 84 1/8. Бумага писчая № 0.
Гарнитура «Таймс нью роман».
Отпечатано на ризографе.
Уч.-изд. л. 6,5.
Заказ № 89.
?
Адрес редакции: 129 626, Москва, 3-я Мытищинская ул., д. 16.
Телефон редакции: 8 (495) 687-98-44
Отпечатано в НПП «Квант»
_________?________
1 Blueprint for a Green Economy, Pears et al, 1989.
2 Источник: таблица построена и адаптирована для России на основе доклада ЮНЕП «Навстречу «зеленой экономике»: пути к устойчивому развитию и искоренению бедности». ЮНЕП, 2011, стр.39-40. Навстречу «зеленой экономике»: пути к устойчивому развитию и искоренению бедности. ЮНЕП, 2011.
3 См., например, Будущее, которого мы хотим. Итоговый документ Конференции ООН. Рио-де-Жанейро. 19 июня 2012.
4 , , Фотоэлектрические преобразователи солнечного излучения. Монография). Ответственный редактор академик , : Наука 1989 г.
5 Паращук Д. Ю., Современные фотоэлектрические и фотохимическиеметоды преобразования солнечной энергии, Рос. хим. ж. (Ж. Рос. хим. об-ва им. ), 2008, т. LII, № 6, стр.107-116.
6 Двойные гетероструктуры: Концепция и применения в физике, электронике и технологии. Успехи физических наук, 2002, т. 172, № 9.
7 Двойные гетероструктуры: Концепция и применения в физике, электронике и технологии. Успехи физических наук, 2002, т. 172, № 9.
8 Нанотехнологии в солнечной энергетике. Ж. Ж. Россия и Германия № 1, 2011, стр.60-64.
_________?_________

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
