


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 . Функция U=U(x1,y1,z1,x2,y2,z2,…xn, yn, zn) назыв. силовой функцией. Элементарная работа сил поля: δА=∑δАi= dU. Если силовое поле является потенц-ным, элементарная работа сил в этом поле равна полному дифференциалу силовой функции. Работа сил на конечном перемещении
. Функция U=U(x1,y1,z1,x2,y2,z2,…xn, yn, zn) назыв. силовой функцией. Элементарная работа сил поля: δА=∑δАi= dU. Если силовое поле является потенц-ным, элементарная работа сил в этом поле равна полному дифференциалу силовой функции. Работа сил на конечном перемещении  , т. е. работа сил в потенц-ном поле равна разности значений силовой функции в конечном и начальном положениях и не зависит о формы траектории. На замкнутом перемещении работа равна 0. Потенциальная энергия П равна сумме работ сил потенциального поля на перемещении системы из данного положения в нулевое. В нулевом положении П0= 0. П=П(x1,y1,z1,x2,y2,z2,…xn, yn, zn). Работа сил поля на перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий А1,2= П1– П2. Эквипотенциальные поверхности – поверхности равного потенциала. Сила направлена по нормали к эквипотенциальной поверхности. Потенциальная энергия системы отличается от силовой функции, взятой со знаком минус, на постоянную величину U0: А1,0= П =U0 – U. Потенциальная энергия поля силы тяжести: П= mgz. Потенц. энерг. поля центральных сил. Центральная сила – сила, которая в любой точке пространства направлена по прямой, проходящей через некоторую точку (центр), и модуль ее зависит только от расстояния r точки массой m до центра:
, т. е. работа сил в потенц-ном поле равна разности значений силовой функции в конечном и начальном положениях и не зависит о формы траектории. На замкнутом перемещении работа равна 0. Потенциальная энергия П равна сумме работ сил потенциального поля на перемещении системы из данного положения в нулевое. В нулевом положении П0= 0. П=П(x1,y1,z1,x2,y2,z2,…xn, yn, zn). Работа сил поля на перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий А1,2= П1– П2. Эквипотенциальные поверхности – поверхности равного потенциала. Сила направлена по нормали к эквипотенциальной поверхности. Потенциальная энергия системы отличается от силовой функции, взятой со знаком минус, на постоянную величину U0: А1,0= П =U0 – U. Потенциальная энергия поля силы тяжести: П= mgz. Потенц. энерг. поля центральных сил. Центральная сила – сила, которая в любой точке пространства направлена по прямой, проходящей через некоторую точку (центр), и модуль ее зависит только от расстояния r точки массой m до центра:  ,
, ![]() . Центральной является гравитационная сила
. Центральной является гравитационная сила  ,
,
![]() , f = 6,67⋅10-11м3/(кгс2) – постоянная тяготения. Первая космическая скорость v1=
, f = 6,67⋅10-11м3/(кгс2) – постоянная тяготения. Первая космическая скорость v1=![]() ≈ 7,9 км/с, R = 6,37⋅106м – радиус Земли; тело выходит на круговую орбиту. Вторая космическая скорость: v11=
≈ 7,9 км/с, R = 6,37⋅106м – радиус Земли; тело выходит на круговую орбиту. Вторая космическая скорость: v11=![]() ≈ 11,2 км/с, траектория тела парабола, при v >v11– гипербола. Потенц. энергия восстанавливающей силы пружин:
≈ 11,2 км/с, траектория тела парабола, при v >v11– гипербола. Потенц. энергия восстанавливающей силы пружин:
 , λ – модуль приращения длины пружины. Работа восстанавливающей силы пружины:
, λ – модуль приращения длины пружины. Работа восстанавливающей силы пружины:  , λ1 и λ2 – деформации, соответствующие начальной и конечной точкам пути.
, λ1 и λ2 – деформации, соответствующие начальной и конечной точкам пути.
Вопросы для самоконтроля:
1. Опишите общие теоремы динамики
2. Теорема об изменении количества движения материальной точки
3. Теорема об изменении момента количества движения материальной точки
4. Элементарная работа - опишите это понятие
5. Теорема об изменении кинетической энергии точки.
Рекомендуемая литература
1. , , Курс теоретической механики. Т.1, 2 М., 1985.
2 , Курс теоретической механики.– М.: , 1983.
3 Теоретическая механика. –М., 1980
4 , Краткий курс теоретической механики. М., 1986 и предыдущие издания
5 , , Курс теоретической механики. Ч 1, М., 1984 и предыдущие издания
Лекция 7: Динамика системы.
План: | 1. Введение в динамику системы. Масса системы. Центр масс |
2. Теорема о движении центра масс. Закон сохранения движения центра масс | |
3. Момент инерции тела относительно оси. Радиус инерции. Моменты инерции некоторых тел. Теорема Гюйгенса. Центробежные моменты инерции | |
4. Теорема об изменении количества движения системы. Количество движения системы. Приложение теоремы к движению жидкости. Тело переменной массы. Формулы Мещерского и Циолковского. 5. Теорема об изменении момента количества движения системы. Главный момент количества движения системы. Теорема моментов | |
6. Закон сохранения главного момента. Приложение теоремы моментов к движению жидкости. Турбинное уравнение Эйлера | |
7. Теорема об изменении кинетической энергии системы. Кинетическая энергия системы: 1.Поступательное движение. 2.Вращательное движение. З. Плоскопараллельное движение. Некоторые случаи вычисления работы. Теорема об изменении кинетической энергии системы. |
Динамика материальной системы
Материальная система – совокупность материальных точек, движение которых взаимосвязаны. Масса системы = сумме масс всех точек (или тел), образующих систему: М=∑mk. Центр масс (центр инерции) – геометрическая точка, радиус-вектор ![]() которой определяется равенством:
которой определяется равенством: ![]() , где
, где ![]() – радиусы-векторы точек, образующих систему. Координаты центра масс:
– радиусы-векторы точек, образующих систему. Координаты центра масс: ![]() и т. д. Внешние силы Fe – силы, действующие на точки системы со стороны тел, не входящих в систему. Внутренние силы Fi – силы, вызванные взаимодействием точек, входящих в систему. Свойства внутренних сил: 1) Геометрическая сумма (главный вектор) всех внутренних сил = 0; 2) Геометрическая сумма моментов всех внутренних сил относительно произвольной точки = 0. Дифф-ные ур-ния движения системы матер. точек:
и т. д. Внешние силы Fe – силы, действующие на точки системы со стороны тел, не входящих в систему. Внутренние силы Fi – силы, вызванные взаимодействием точек, входящих в систему. Свойства внутренних сил: 1) Геометрическая сумма (главный вектор) всех внутренних сил = 0; 2) Геометрическая сумма моментов всех внутренних сил относительно произвольной точки = 0. Дифф-ные ур-ния движения системы матер. точек:
 или в проекциях на оси координат:
или в проекциях на оси координат: ![]() и т. д. для каждой точки (тела) системы. Геометрия масс.
и т. д. для каждой точки (тела) системы. Геометрия масс.
Момент инерции матер. точки относительно некоторой оси называется произведение массы m этой точки на квадрат ее расстояния h до оси: mh2. Момент инерции тела (системы) относительно оси Оz: Jz= ∑mkhk2. При непрерывном распределении масс (тело) сумма переходит в интеграл: Jx= ∫(y2+z2)dm; Jy= ∫(z2+x2)dm; Jz= ∫(x2+y2)dm – относительно координатных осей. Jz= M⋅ρ2, ρ – радиус инерции тела – расстояние от оси до точки в которой нужно сосредоточить всего тела, чтобы ее момент инерции равнялся моменту инерции тела. Момент инерции относительно оси (осевой момент инерции) всегда >0. Полярный момент инерции Jo= ∫( x2+y2+z2)dm; Jx+Jy+Jz= 2Jo. Центробежный момент инерции Jxy для матер. точки называется произведение ее координат x и y на ее массу m. Для тела центробежными моментами инерции называются величины, определяемые равенствами: Jxy=∫xy dm; Jyz=∫yz dm; Jzx=∫zx dm. Центробежные моменты инерции симметричны относительно своих индексов, т. е. Jxy=Jyx и т. д. В отличие от осевых, центробежные моменты инерции могут иметь любой знак и обращаться в нуль. Главной осью инерции тела назыв. ось, для которой оба центробежных момента инерции, содержащие индекс этой оси, равны нулю. Например, если Jxz=Jyz=0, то ось z – главная ось инерции. Главной центральной осью инерции назыв. главная ось инерции, проходящая через центр масс тела. 1)Если тело имеет плоскость симметрии, то любая ось, перпендикулярная к этой плоскости, будет главной осью инерции тела для точки, в которой ось пересекает плоскость. 2)Если тело имеет ось симметрии, то эта ось является главной осью инерции тела (ось динамической симметрии). Размерность всех моментов инерции [кгм2]
Центробежный момент инерции зависят не только от направления координатных осей, но и от выбора начала координат.
Тензор инерции в данной точке: 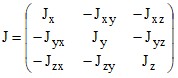
Моменты инерции некоторых однородных тел:
стержень массы m и длины L: ![]()
![]() ;
;  .
.
Однородный сплошной диск с центром в точке С радиуса R и массы m: ![]() . Полый цилиндр:
. Полый цилиндр: 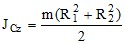 ,
,
цилиндр с массой распределенной по ободу (обруч): ![]() .
.
Теорема Гюйгенса-Штейнера момент инерции тела относительно произвольной оси равен моменту инерции относительно оси ей параллельной и проходящей через центр масс тела плюс произведение массы тела на квадрат расстояния между осями:
![]() . Наименьший момент инерции будет относительно той оси, которая проходит через центр масс. Момент инерции относительно произвольной оси L: J = Jxcos2α + Jycos2β + Jzcos2γ – 2Jxycosαcosβ – 2Jyzcosβcosγ – 2Jzxcosγcosα,
. Наименьший момент инерции будет относительно той оси, которая проходит через центр масс. Момент инерции относительно произвольной оси L: J = Jxcos2α + Jycos2β + Jzcos2γ – 2Jxycosαcosβ – 2Jyzcosβcosγ – 2Jzxcosγcosα,
если координатные оси являются главными относительно своего начала, то:
J = Jxcos2α + Jycos2β + Jzcos2γ. Теорема о движении центра масс системы.
Произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил ![]() – дифференциальное уравнение движения центра масс. В проекциях на оси координат:
– дифференциальное уравнение движения центра масс. В проекциях на оси координат: ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 |
