

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 2.35. Рекомендуемая схема включения:
1 — трансформаторы тока; 2 — магнитный пускатель; 3 — клеммник; 4 — катушка магнитного пускателя; 6 — токовые резисторы
ФУЗ предназначен для установки внутри щита управления электродвигателем. В качестве датчиков тока предусмотрено использование трансформаторов тока. Выходная цепь рассчитана на работу с магнитным пускателем от 0 до 4 величины с катушками включения на напряжение 220 В, 50 Гц.
Принцип работы ФУЗ основан на сравнении напряжений, поступающих от трансформаторов тока, с заданным напряжением. Если поступивший сигнал превышает заданное напряжение, устройство обесточивает цепь питания магнитного пускателя. То же происходит при обрыве фазного провода.
Диапазон регулирования соотношения Iпер/Iраб — от 1 до 8.
Время срабатывания защиты находится в обратно пропорциональной зависимости от величины: Iпер/Iраб.
Конструкция устройства предусматривает возможность регулирования величины тока потребления электродвигателя для срабатывания защиты при аварийном превышении нагрузки. Устройство отключает электродвигатель при недопустимой асимметрии фазных напряжений и в случае появления напряжения 20 ±2 В между корпусом двигателя и средней точкой его обмоток.
Блок фазовой защиты электродвигателей ФУЗ-2М
Устройство фазовой, защиты электродвигателей (ФУЗ) предназначено для защиты 3х фазных электродвигателей мощностью до 1,5 кВт, работающих в длительном режиме эксплуатации под контролем САУ (средств автоматического управления).
Устройство обеспечивает выдачу в САУ соответствующих сигналов при следующих аварийных ситуациях:
- превышение установленного тока потребления на заданную величину (задается потребителем); обрыва фазного провода; асимметрии фазных напряжений.
Таблица . Основные технические характеристики
Время срабатывания защиты при обрыве фазного провода и недопустимой асимметрии фазных напряжений | 1с |
Диапазон установки времени срабатывания защиты при перегрузке | 0,1-10 с |
Напряжение от токовых трансформаторов | 3мВ -3,0 В |
Частота | 50 Гц |
Сопротивление встроенных токовых резисторов | 100 Ом |
Напряжение питания | +27 В |
Потребляемая мощность, не более | 2 Вт |
В САУ выдаются сигналы «Ход двигателя» и «Авария» в прямой логике, при токе до 10 мА, уровнями | 0 и +3,5 - 4,5 В |
Габаритные размеры, мм | 130x 105 x 70 |
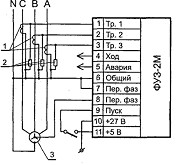
Рис. 2.37. Схема присоединения ФУЗ-2М:
1 — трансформаторы тока; 2 — токовые резисторы;
3 — электродвигатель
ФУЗ предназначен для установки внутри щита управления электродвигателем. В качестве датчиков тока предусмотрено использование трансформаторов тока, обеспечивающих при номинальном токе электродвигателя напряжение на токовых резисторах 3 ±0,5 мВ в диапазоне малых токов (до 300 мА) или 50 ±5 мВ в диапазоне больших токов (0,3 А — 3А). Требуемые параметры токовых трансформаторов достигаются путем подбора количества витков токовой обмотки и сопротивления токового резистора.
Принцип работы ФУЗ основан на сравнении напряжений, поступающих от трансформаторов тока, с заданным напряжением. Если поступивший сигнал превышает заданное напряжение, устройство при недопустимой асимметрии фазных напряжений выдает в САУ соответствующие сигналы. То же происходит при обрыве фазного провода.
В ФУЗ предусмотрены два порога срабатывания защиты: рабочий и аварийный; при превышении рабочего порога ФУЗ зажигает индикатор «стоп» и снимает сигнал «ход двигателя»; при превышении аварийного порога дополнительно выдается сигнал «авария» и загорается индикация аварии.
Диапазон регулирования соотношения Iпор/ IРаб — от 1 до 8.
Время срабатывания защиты находится в обратно пропорциональной зависимости от величины Iпор/ IРаб
При недопустимой асимметрии фазных напряжений устройство снимает сигнал «ход двигателя» в случае появления напряжения 20 ±2 В между корпусом двигателя и средней точкой его обмоток.
Параметрическое регулирование привода с двигателем постоянного тока
независимого возбуждения
Параметрическое регулирование заключается в изменении значения того или иного параметра двигателя, от которого зависит вид его статической характеристики. На примере выражения (47) для электромеханической характеристики показано, что регулирование частоты вращения можно осуществить изменением сопротивления цепи якоря, потока возбуждения и напряжения, подводимого к якорю двигателя.
Таким образом, возможны три параметрических способа регулирования частоты вращения.
Регулирование частоты вращения изменением сопротивления обычно называют реостатным способом регулирования, так как для его осуществления требуется включение регулировочного реостата в цепь якоря. Как правило, регулировочный реостат конструктивно выполняют ступенчатым и в процессе регулирования шунтируют или включают те или иные его ступени. На рис. 75 показано семейство характеристик при разных значениях сопротивления регулировочного реостата. Там же зафиксированы частоты вращения, получаемые на каждой из характеристик при одном и том же значении статического момента сопротивления на валу двигателя.
Регулирование изменением сопротивления желательно использовать при статическом моменте сопротивления, не зависящем от частоты вращения и равном номинальному значению. В этом случае ток, проходящий по якорю двигателя, является номинальным, Iя. н = Мном/См и, следовательно, двигатель используется наилучшим образом.
Рассматриваемый способ позволяет осуществлять регулирование только вниз от частот вращения, определяемых естественной характеристикой. Реостатное регулирование характеризуется значительными электрическими потерями в цепи якоря особенно при работе на низких частотах вращения.
Действительно, для контура цепи якоря, в соответствии со вторым законом Кирхгофа можно записать так называемое уравнение равновесия эдс U = E + IяR
При умножении левой и правой частей этого уравнения на Iя получим
UяIя = ЕIя + Iя2R.
Тогда электрические потери будут определяться как ДРЭЛ = ![]()
![]() R =UIя – ЕIя, или
R =UIя – ЕIя, или
![]()
![]() сократив числитель и знаменатель последнего выражения на Iя, получим
сократив числитель и знаменатель последнего выражения на Iя, получим ![]()
![]() .
.
Произведение напряжения, приложенного к цепи якоря, на его ток определяет мощность электроэнергии Р1, потребляемой цепью якоря двигателя из сети Р1 — UIя.
С учетом этого выражение для электрических потерь принимает следующий вид:![]()
![]()
Подставив в последнее выражение значения Е = кЕФn и U = кЕФn0, получим
![]()
Для большинства двигателей отличие п0 от п в номинальном режиме составляет (1ч5)% и поэтому Рэл при номинальной скорости невелико. Если же и в процессе регулирования частота вращения уменьшится только в 2 раза по сравнению с номинальной частотой, то легко подсчитать, что электрические потери увеличатся в несколько десятков раз. Это является существенным недостатком данного способа регулирования.
В процессе регулирования (см. рис. 75) уменьшается жесткость механических характеристик, а следовательно, и стабильность частоты вращения при колебаниях нагрузки. Это ограничивает диапазон регулирования в пределах Д = 2:1.
В то же время реостатный способ прост и применяется главным образом для двигателей небольшой мощности, когда не предъявляют высоких требований к качеству регулирования.
Регулирование частоты вращения изменением сопротивления цепи якоря двигателей постоянного тока последовательного и смешанного возбуждения мало чем отличается от аналогичного способа для параллельного возбуждения.
2. Регулирование частоты вращения изменением магнитного потока возможно при уменьшении значения тока, проходящего по обмоткам возбуждения. Конструкция обычных электрических двигателей такова, что при прохождении по обмотке возбуждения номинального тока магнитопровод двигателя оказывается насыщенным.
Поэтому физически осуществить увеличение значения потока воздушного зазора повышением тока возбуждения не представляется возможным. Указанное регулирование частоты вращения производится только уменьшением магнитного потока. На рис. 84 представлены семейства скоростных и механических статических характеристик, построенных при значениях потока воздушного зазора меньше номинального (Фн> Ф1> Ф2).
Частота вращения при рассматриваемом способе регулирования изменяется вверх от частоты на естественной характеристике. Так как двигатель регулируют уменьшением токов в обмотке возбуждения, которые являются относительно небольшими, то может быть обеспечена высокая плавность регулирования, а сам способ по потерям энергии будет экономичным.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
