

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Одной из них является одноканальная синхронная СИФУ, функциональная схема которой приведена на рис. 3.6. Эта СИФУ предназначена для тиристорных станций, обеспечивающих плавный пуск и регулируемое динамическое торможение АД, а также регулирование скорости электроприводов, не требующих высокого быстродействия. [11]
Вторая - синхронная аналого-цифровая СИФУ-2, принцип действия которой и динамические свойства описаны в § 3.3 и 3.4. Эта СИФУ предназначена для тиристорных станций, обеспечивающих регулирование скорости и динамическое торможение электроприводов с повышенным быстродействием. [12]
Автоматическое регулирование асинхронных двигателей изменением подводимого напряжения
Параметрический способ регулирования асинхронного двигателя изменением подводимого напряжения обладает рядом недостатков. Среди них наиболее существенными являются: небольшая жесткость статических механических характеристик и низкий диапазон регулирования. Подключением резистора к цепи ротора можно расширить диапазон регулирования, но при этом жесткость характеристик еще в большей степени понижается и, следовательно, еще в большей степени понижается стабильность частоты вращения.
Введением отрицательной обратной связи (см. § 42) можно устранить перечисленные недостатки. При этом не только повышается жесткость статических характеристик, но и расширяется диапазон регулирования, даже если не включать в роторную цепь добавочного внешнего сопротивления.
Укрупненная схема такого электропривода приведена на рис. 112, а. Изменение напряжения, подводимого к двигателю, осуществляется регулятором напряжения РН, в качестве которого может быть использован тиристорный регулятор. Стабилизирующую обратную отрицательную связь по частоте вращения в данном случае осуществляю тахогенератором постоянного тока; можно применять и другие тахогенераторы. Принцип поддержания частоты вращения при изменении момента нагрузки не отличается от изложенного для двигателя постоянного тока.
В схеме, приведенной на рис. 112,а, требуемая частота вращения задается напряжением U3 потенциометра датчика ПД, определяемым положением движка. Напряжение обратной связи Uтг, соответствующее реальной частоте вращения регулируемого двигателя, снимается с якоря тахогенератора ТГ. Причем, так как обратная связь отрицательная, полярность напряжения Uтг противоположна полярности напряжения U3. Следовательно, сигнал Uвх, подаваемый на вход усилителя У, определяется как разность напряжений U3 и Uтг.
Если по каким-либо причинам реальная частота вращения двигателя понизилась, понизится частота вращения ТГ и, следовательно, уменьшится напряжение обратной связи Uтг. Если заданный входной сигнал U3 не изменяется, т. е. требуется поддерживать частоту вращения двигателя на одном и том же уровне, увеличится сигнал Uвх. На выходе усилителя У появится большее напряжение, чем прежде. Под действием большего входного сигнала регулятор напряжения подает большее напряжение на статорные обмотки регулируемого двигателя. Двигатель повысит свой момент на валу и его частота вращения увеличится. Таким образом, произойдет стабилизация частоты вращения при ее уменьшении. По аналогии нетрудно проследить процессы, происходящие в приводе при повышении частоты вращения под воздействием каких-либо возмущений.
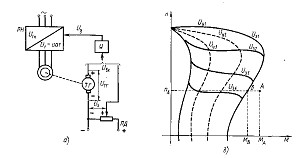
Рис. 112. Схема (а) и механические характеристики (б) замкнутого привода с регулятором напряжения
На рис. 112,б сплошными линиями показано семейство механических характеристик для рассматриваемого привода (U31> U32> U33> U34), а пунктирными — семейство механических характеристик (Uу1 > Uу2 > Uу3) при отключении отрицательной обратной связи.
Характеристики привода с отрицательной обратной связью лежат между двумя характеристиками асинхронного двигателя. Первая из них получена при подаче на двигатель максимально возможного напряжения, которое способен создать регулятор напряжения, вторая — при подаче минимально возможного напряжения, которое способен создать регулятор напряжения при нулевом сигнале управления.
Сравнение характеристик двух семейств показывает очевидное преимущество характеристик замкнутого привода, которые более жесткие и, следовательно, обладают более стабильными частотами вращения и большим диапазоном регулирования.
Достоинством рассмотренного автоматического способа регулирования являются такие качества приводов, построенных на его основе, как относительная простота, надежность, удобство в эксплуатации, возможность использования в тяжелых производственных условиях.
Недостатком привода является наличие больших потерь. Действительно, в любой момент времени регулируемый двигатель работает на одной из характеристик, показанных на рисунке пунктиром. Следовательно, частота вращения идеального холостого хода остается неизменной при различных сигналах управления, т. е. при различных напряжениях, приложенных к статору. Если при этом двигатель развивает низкую частоту вращения, то скольжение оказывается значительным и потери также велики. Это определяет низкий кпд привода. При частоте вращения двигателя в 2 раза ниже номинальной и номинальной нагрузке, потери привода достигают 50% потребляемой мощности. Если при тех же условиях в процессе регулирования понизить частоту вращения в 5 раз от номинальной, потери будут составлять 80%. ,
Рассмотренный способ регулирования характерен для приводов мощностью не более 20—30 кВт, используемых в основном в технологических процессах, требующих кратковременной работы двигателей (повторно-кратковременный и кратковременный режимы). В таких режимах от двигателя требуется преодоление значительных нагрузок. Может оказаться, что привод с характеристиками, приведенными на рис. 112,б, не способен удовлетворить это требование. Действительно, двигатель не сможет создать на валу момент МА при частоте вращения пА (точка А), так как эти параметры выходят за пределы семейства характеристик. Максимальный момент, создаваемый при nа, определяется моментом Мв (точка В), причем МВ<МА.
Для того чтобы двигатель развивал большие моменты при низких частотах вращения, в цепь ротора вводят дополнительное сопротивление. В результате этого диапазон регулирования увеличивается. В частности, при тиристорном регуляторе напряжения диапазон регулирования составляет Д = (15ч20): 1.
Автоматическое регулирование асинхронных двигателей с частотным управлением
Основные показатели регулирования определяются видом механических характеристик. Поэтому при конструировании электропривода стремятся, используя тот или иной способ регулирования, сформировать механические характеристики, позволяющие получить заданные показатели.
При частотном регулировании стремятся так воздействовать на двигатель, чтобы его механические характеристики обеспечивали требуемую перегрузочную способность и жесткость во всем диапазоне изменения частоты вращения вала. Этим добиваются высокой стабильности частоты вращения и увеличения диапазона регулирования.
Необходимая перегрузочная способность обеспечивается выполнением определенных соотношений между частотой и напряжением статора. Для достижения высокой жесткости, а следовательно, и высокой стабильности частоты вращения вводят обратные отрицательные связи по частоте вращения.
Соотношения между напряжением и частотой, которые необходимо выдерживать при различных видах механических характеристик рабочих механизмов, чтобы перегрузочная способность двигателя оставалась высокой. Для этого требуется устройство, позволяющее независимо друг от друга изменять напряжение и частоту. Такое устройство называется преобразователем частоты. По принципу действия преобразователи частоты можно разделить на электромашинные и вентильные (статические).
Электромашинные преобразователи состоят из четырех электрических машин. Поэтому они громоздки, обладают низкими динамикой и кпд, невысокой надежностью, требуют больших капитальных и эксплуатационных затрат. В настоящее время электромашинные преобразователи вытесняют вентильные преобразователи, которые позволяют расширить сферу применения дешевых, экономичных и надежных асинхронных двигателей с короткозамкнутым ротором.
Элементная база статических преобразователей обширна. Однако в последнее время наиболее перспективными из них являются преобразователи на тиристорах. Существует большое разнообразие схем статических преобразователей, каждая из которых удовлетворяет конкретным требованиям по мощности, диапазону регулирования частоты вращения, потерям электроэнергии, простоте осуществления регулирования и т. д.
Подавляющее большинство наиболее распространенных схем можно разделить на два класса: тиристорные преобразователи с непосредственной связью и тиристорные преобразователи с промежуточным звеном постоянного тока.
Принцип действия тиристорных преобразователей с непосредственной связью заключается в том, что напряжение питающей сети непосредственно подается на статорные обмотки двигателя через тиристоры, когда они открыты. Частота напряжения на фазах двигателя регулируется последовательностью включения тиристоров, а амплитуда — изменением угла включения их.
Укрупненная функциональная схема таких преобразователей приведена на рис. 114. Система управления СУ на схеме обеспечивает нужную последовательность включения тиристоров силовой части СЧ. Линии трехфазной сети до преобразователя частоты ПЧ обозначены большими буквами А, В, С, а после ПЧ — малыми — а, б, с. Напряжения UАВ, UВС, UСА между линиями А и В, В и С, С и А трехфазной синусоидальной сети с частотой 50 Гц изображены на рис. 115,а. На примере формирования требуемого напряжения UаЬ между линиями а и b рассмотрим, какую последовательность работы СЧ должна обеспечить СУ, чтобы получить частоту напряжения на выходе ПЧ меньшую, чем на входе. Остальные напряжения Ubс и Uса образуются аналогично. Для простоты угол включения тиристора а = 0.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
