

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Из этих характеристик следует, что двигатель в тиристорном приводе может работать кроме двигательного режима также в режимах торможения противовключением и динамического торможения.
Так как токи отрицательного полупериода тиристором не пропускаются, то в схемах (см. рис. 88) невозможно осуществить реверс двигателя изменением полярности выпрямленного напряжения. По той же причине невозможно осуществить режим рекуперативного торможения при вращении двигателя. Поэтому для реверса двигателя изменяют направление включения обмотки якоря или обмотки возбуждения контактными переключателями. Таким образом, добиваются изменения полярности напряжения на этих обмотках.
Приведенные способы реверса имеют следующие недостатки: в первом случае при изменении полярности якорной обмотки приходится коммутировать токи в силовой цепи, что является технически сложно, во втором случае процесс реверса затягивается во времени из-за большого значения индуктивности обмотки возбуждения.
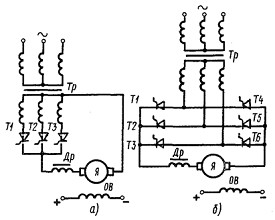
Реверс двигателя часто осуществляют по-другому, применяя схемы реверсивных управляемых выпрямителей, одна из которых представлена на рис. 90. Отличие этой схемы от нереверсивных схем заключается в наличии второго комплекта тиристоров Т4, Т5, Т6, пропускающих токи, направление которых противоположно направлению токов первого комплекта тиристоров Т1, Т2, ТЗ (см. рис. 88,а и 89).
Рис. 88. Схемы электроприводов с тиристорными преобразователями при однополупериодном (а) и двухполупериодном (б) выпрямлении

Рис. 89. Характеристики системы управляемый выпрямитель-двигатель
При работе машины в двигательном режиме в одном из двух направлений вращения один из управляемых выпрямителей, например В1, работает в режиме выпрямления, другой В2 — закрыт. Для осуществления реверса выпрямитель В1 закрывается, а В2 начинает работать в режиме выпрямления.
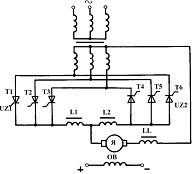
Рис. 90. Схема электропривода с реверсивным тиристорным преобразователем
Диапазон изменения скорости в системе УВ—Д колеблется в пределах Д ≈ 10:1-20:1. Коэффициент полезного действия тиристорного привода определяется произведением кпд трансформатора и тиристора и зависит от скорости и мощности привода. Например, кпд системы УВ—Д мощностью 50—100 кВт — 0,9—0,92 в номинальном режиме. С уменьшением мощности кпд понижается.
Наряду с приводами непрерывного регулирования широкое распространение в ряде робототехнических и других систем получили приводы импульсного регулирования.
Наиболее часто в качестве изменяемого параметра используют напряжение, подаваемое на двигатель. В момент подключения цепи якоря к источнику питания двигатель разгоняется, а во время отключения (паузы) — тормозится. В установившемся режиме, когда соотношение времени импульса tи и времени паузы tп не изменяется, частота вращения, до которой двигатель разгоняется, и частота вращения, до которой он тормозится, остаются постоянными. Средняя частота вращения также остается постоянной.
Если соотношение времени импульса tи и времени паузы tп изменить при постоянном значении периода Т, то через некоторое время изменится значение средней частоты вращения. Таким образом совершают регулирование.
Импульсный способ регулирования, при котором значение напряжения источника питания остается постоянным, а соотношение длительности импульса tи и tп паузы изменяется при постоянном периоде, называется широтно-импульсным.
Амплитуда колебаний мгновенной частоты вращения относительно средней зависит от частоты подачи импульса. Более высокая частота переключений определяет меньший размах колебаний частоты вращения. Следовательно, для получения приводов с меньшими колебаниями частоты вращения необходимо использовать быстродействующие электронные ключи.
Для осуществления импульсного способа регулирования обычно используют транзисторы, работающие в режиме ключа, либо тиристоры. Эти элементы по своим динамическим параметрам обеспечивают частоту коммутации в диапазоне 800—2000 Гц, что соответствует требованиям, предъявляемым к современным приводам.
Простейшая схема электропривода с транзисторным ключом приведена на рис. 91.
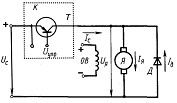
При замкнутом состоянии ключа К ток якоря нарастает по экспоненте, так как обмотка якоря обладает индуктивным сопротивлением, и проходит по цепи: ключ — якорь — источник питания. В этот период шунтирующий диод Д заперт напряжением сети. При разомкнутом состоянии ключа К ток якоря, проходя в прежнем направлении под действием эдс самоиндукции обмотки якоря, спадает по экспоненте.
Рис. 91. Схема привода при импульсном изменении напряжения на якоре двигателя
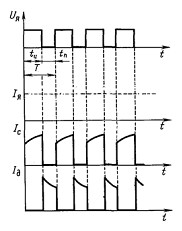
Рис. 92. Диаграммы напряжения и токов в приводе при импульсном изменении напряжения на якоре двигателя
При этом цепь замыкается по элементам: якорь — диод — якорь. Следовательно, диод Д включен в схему с целью создания электрической цепи для прохождения тока, возникшего под воздействием эдс самоиндукции обмотки якоря.
Кривые изменения напряжения на якоре двигателя Uя, токов якоря Iя, Iс (потребляемого из сети) и Iд (проходящего по шунтирующему диоду) приведены на рис. 92.
Так как при импульсном регулировании мгновенная частота вращения и момент постоянно пульсируют, то в данном случае под механической характеристикойпонимают зависимость среднего момента двигателя от средней частоты вращения при постоянном стеднем напряжении.
Выражение для механических характеристик при широтно-импульсном регулировании имеет вид
![]()
где R = Rя +RТК — суммарное сопротивление обмотки якоря и внутреннего сопротивления транзисторного ключа.
Среднее напряжение U ср за период определяется как Uср = Uя· tи/(tи + tп)=Uяtи/Т.
Величину е = tи/(tи + tп) = tи/Т называют скважностью.
Среднее значение напряжения можно выразить через скважность Uср = еUя
Тогда уравнение механической характеристики примет такой вид:
![]()
Графики, построенные по этому уравнению, для разных значений скважности (е1> е2> е3) изображены на рис. 93. Эти характеристики представляют собой параллельные прямые линии: сплошные — в области средних и больших статических моментов сопротивления и пунктирные — в области малых нагрузок.
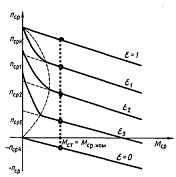
Рис. 93. Характеристики привода при импульсном изменении напряжения на якоре двигателя
Из рисунка видно, что, изменяя значение скважности, можно регулировать частоту вращения двигателя в широких пределах.
При малых нагрузках может оказаться, что ток, проходящий по обмотке якоря, уменьшается до нуля в течение времени tп. Тогда его график будет иметь вид, изображенный на рис. 94. Отрицательным ток Iя быть не может, так как диод Д не пропускает тока в непроводящем направлении. Поэтому существует некоторый промежуток времени t0, когда Iя = 0. В этом случае наступает режим прерывистых токов.
В режиме прерывистых токов механические характеристики двигателя теряют линейность и жесткость. На рис. 93 область прерывистых токов ограничена пунктирной линией, а действительные части характеристик в этом режиме изображены сплошными линиями.
Электроприводы с импульсным регулированием просты по своему исполнению, обладают высоким быстродействием и надежностью. Их использование наиболее выгодно при наличии сети постоянного тока.
Автоматическое регулирование частоты вращения двигателя постоянного тока независимого возбуждения
Разомкнутые приводы, осуществляющие параметрические способы регулирования, просты по своему исполнению, дешевы и надежны в эксплуатации, а также обладают другими ценными качествами. Однако наряду с этим они имеют существенные недостатки: низкую стабильность частоты вращения вала двигателя при тех или иных возмущающих воздействиях (например, при изменении момента нагрузки на валу), и, как следствие, малый диапазон регулирования.
Если необходим широкий диапазон регулирования, что характерно для современных приводов, усложняют схемы электроприводов, вводя одну или несколько обратных связей. Такие электроприводы называются замкнутыми. В них, как это было сказано выше, реализуются автоматические способы регулирования.
Следует различать жесткие и гибкие обратные связи. Первые действуют как при переходных режимах, так и при установившихся, вторые — только при переходных. В зависимости от эффекта воздействия обратные связи делятся на положительные и отрицательные.
Если под воздействием возмущения регулируемая величина изменяется и обратная связь отклоняет ее в том же направлении, такая связь называется положительной.
В противном случае она является отрицательной. Например, если при работе привода частота вращения вала двигателя увеличивается из-за уменьшения действия статического момента сопротивления, а обратная связь действует против этого увеличения, стремясь его компенсировать, такую связь называют отрицательной.
Рассмотрим принцип действия замкнутых систем на примере электропривода с автоматическим способом регулирования частоты вращения изменением напряжения, подаваемого на якорь двигателя с жесткой отрицательной обратной связью по частоте вращения. Схема такой системы представлена на рис. 95. Обратная связь по частоте вращения осуществляется тахогенератором ТГ. Требуемая частота вращения nз устанавливается задающим устройством при подаче в систему соответствующего напряжения U3.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
