

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Если при увеличении частоты вращения ток якоря остается номинальным Iя. н (рабочие точки двигателя расположены на вертикальной линии рис. 84, а), то электромагнитный момент уменьшается так, что электромагнитная мощность остается постоянной. Следовательно, регулирование изменением потока желательно осуществлять в случае, когда механическая мощность сопротивления, передаваемая от рабочего механизма на вал двигателя, не зависит от частоты вращения, а момент сопротивления изменяется обратно пропорционально частоте вращения. Диапазон регулирования двигателей независимого возбуждения общего назначения достигает Д = 2:1; специальных двигателей Д = 8:1.
Диапазон регулирования двигателя постоянного тока последовательного возбуждения уменьшением его потока в воздушном зазоре составляет более Д = 2:1.
Главными факторами, ограничивающими диапазон регулирования при рассматриваемом способе, являются механическая прочность конструкции двигателя и условия коммутации.
3. Регулирование частоты вращения двигателя изменением напряжения питания. Данный способ обеспечивает регулирование частоты вращения вниз от частоты вращения на естественной характеристике. Это связано с тем, что изменять напряжение можно, только уменьшая его от номинального значения. Увеличение напряжения выше номинального сопряжено с повышением опасности пробоя изоляции и повышением потерь в стали.
Из уравнения механической характеристики следует, что при изменении U коэффициент Rя/(кЕ·кМ·Ф) при аргументе М, определяющий угол наклона графика, остается неизменным. Поэтому характеристики семейства при таком способе регулирования параллельны (рис. 85) и их жесткость остается постоянной.

Рис. 84. Скоростные (а) и механические (б) характеристики двигателя постоянного тока независимого возбуждения при регулировании частоты вращения током возбуждения
Из выражения U = кЕФn0 следует, что частота вращения идеального холостого хода по определяется как n0 = U/( кЕФ),тогда при уменьшении U(Uн> U1> U2> Uз) частота вращения п0 также уменьшается.
Для того чтобы ток якоря Iя оставался всегда номинальным и тем самым оптимально использовался двигатель, необходимо рассматриваемый способ регулирования осуществлять при постоянном моменте статического сопротивления, равном номинальному. Диапазон регулирования Д = 10:1 ограничивается снизу неустойчивой работой двигателя на низких частотах вращения.
В качестве регулируемых источников питания используют электромашинные генераторы (система Г— Д), управляемые преобразователи (система УВ—Д), электромашинные или магнитные усилители (системы ЭМУ—Д и МУ—Д).
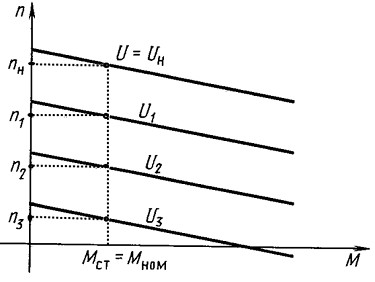
Рис. 85. Механические характеристики двигателя постоянного тока независимого возбуждения при изменении напряжения, подводимого к якорю
В настоящее время наиболее перспективными являются статические полупроводниковые выпрямители, позволяющие преобразовывать синусоидальное напряжение в постоянное, значение которого изменяется под воздействием управляющего сигнала. Выпрямители отличаются от других преобразователей более высоким кпд, меньшей установочной мощностью, меньшими габаритами и массой, относительно низкими капитальными и эксплуатационными расходами, большим быстродействием.
Система управляемый выпрямитель - двигатель
Из систем, обеспечивающих регулирование изменением напряжения питания, наиболее распространенными являются системы генератор—двигатель (Г—Д) и управляемый выпрямитель—двигатель (УВ—Д). Первая из них достаточно подробно рассматривается в курсе «Электротехника». В настоящее время наиболее перспективны управляемые выпрямители, построенные на основе тиристоров.
Тиристорные преобразователи преобразовывают энергию переменного тока в энергию постоянного тока.
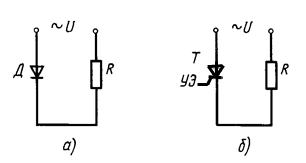
Рис. 86. Схема однофазных однополупериодных выпрямителей с диодом (а) и тиристором (б)
По своим свойствам тиристоры близки к нерегулируемым полупроводниковым вентилям—диодам. Поэтому принцип их действия нетрудно понять, сравнив его с принципом действия диодов. Схемы простейших однополупериодных выпрямителей, построенных на основе диода Д, приведены на рис. 86, а, а тиристора Т—на рис. 86, б.
В отрицательный полупериод диод и тиристор запираются напряжением сети, поэтому напряжение на нагрузке R, а следовательно, и ток равны нулю. При положительном полупериоде диод отпирается и, так как его сопротивление в этом состоянии мало, все напряжение сети приходится на сопротивление нагрузки (рис. 87, а). Это справедливо и для тиристора, если в течение положительного по - лупериода к управляющему электроду УЭ будет приложен небольшой положительный потенциал—сигнал управления.
При отсутствии сигнала управления тиристор заперт как при отрицательном, так и при положительном полупериоде. Таким образом, если при t = t1 положительного полупериода напряжения сети на управляющий электрод подать сигнал управления, тиристор отопрется и будет находиться в этом состоянии до появления отрицательного потенциала. Если при следующих периодах напряжения сети управляющий сигнал подавать через прежний промежуток времени, то картина повторится (рис. 87, б).
В рассматриваемом случае нагрузка носит характер активного сопротивления.
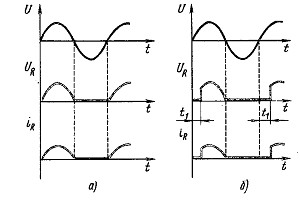
Рис. 87. Диаграммы напряжений и токов однофазных однополупериодных выпрямителей с диодом (а) и тиристором (б)
Следовательно, ток, проходящий по цепи, будет полностью повторять изменение напряжения, как это показано на рис. 87, а, б.
Если изменить длительность изменится среднее значение выпрямленного тиристором напряжения: при увеличении t1 его среднее значение уменьшается, при уменьшении t1 — увеличивается. Это свойство используют в тиристорных приводах для регулирования скорости. Так, если вместо R (см. рис. 86) подключить якорную цепь двигателя постоянного тока, получим тиристорный привод, в котором напряжение на якоре изменяется с изменением t1.
Время подачи управляющего сигнала от начала положительного полупериода принято измерять углом б, называемым углом включения тиристора б = щсt1, где (щс—круговая частота напряжения питания—определяется через частоту питания fс по выражению щс = 2рfс.
Из курса «Электротехника» известно, что периодически изменяемая несинусоидальная величина (ток или напряжение) может быть представлена в виде суммы постоянной составляющей и синусоид, различной частоты.
Как следует из рис. 87, б, выпрямленный ток носит пульсирующий характер, поэтому он может быть представлен суммой, состоящей из постоянного тока и переменных синусоидальных токов различной частоты. Переменные составляющие выпрямленного тока отрицательно сказываются на условиях коммутации двигателей постоянного тока и увеличивают потери в них.
Для подавления гармонических составляющих в тиристорные преобразователи часто последовательно с якорем двигателя включают дроссель (реактор), который обладает большим реактивным (индуктивным) сопротивлением и наряду с индуктивностью якорной обмотки выполняет роль индуктивного фильтра.
Среди большого разнообразия схем тиристорных приводов следует различать схемы одно - и двухполупериодного выпрямления, а также с питанием от одно - или трехфазной сети переменного тока.
Наибольшее распространение получили трехфазные схемы с нулевым выводом питающего трансформатора Тр и мостовые (рис. 88, а, б). В первом случае используется один полупериод, во втором—оба полупериода напряжения (блоки управления тиристорами на рисунке не показаны).
Уравнение механической характеристики системы управляемый выпрямитель — двигатель имеет такой вид:
![]()
где ![]()
![]() — максимально выпрямленное напряжение, получаемое при открытых тиристорах в течение всего положительного полупериода,
— максимально выпрямленное напряжение, получаемое при открытых тиристорах в течение всего положительного полупериода, ![]()
![]() — суммарное сопротивление якорной цепи.
— суммарное сопротивление якорной цепи.
Жесткость механических характеристик тиристорного привода меньше жесткости естественной характеристики двигателя за счет большего активного сопротивления якорной цепи.
На рис. 89 приведено семейство характеристик, соответствующих выражению при разных значениях а. Характеристики представляют собой параллельные прямые, изображенные на рисунке сплошными линиями в области средних и больших статических моментов сопротивления и пунктирными линиями в области малых нагрузок.
Реальные характеристики тиристорного привода в области малых нагрузок отличаются от характеристик выражения n. Это объясняется тем, что для сглаживания гармонических составляющих в этой области необходимо иметь фильтр с очень большим значением индуктивности. Практически это трудно обеспечить. Поэтому ток, проходящий в цепи якоря, становится прерывистым и характеристики начинают вести себя так, как показано на участке рис. 89, ограниченном пунктирной линией.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
