

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Обозначим ![]()
![]() тогда Р =
тогда Р = ![]()
![]() t =
t = ![]()
![]() (3.7)
(3.7)
т. е. сила притяжения Р пульсирует по значению с двойной частотой сети, не меняя при этом своего знака (рис. 18,б). Сила притяжения может быть представлена в виде двух составляющих: постоянной во времени Р' = Рт/2 и изменяющейся во времени по закону косинуса переменной Р" =![]()
![]() t. Среднее за период значение силы Р будет
t. Среднее за период значение силы Р будет ![]()
![]() .
.
Если отрывное усилие электромагнита будет Ротр, то дважды за период в точке А (рис. 18, в) якорь электромагнита будет отпадать, а в точке В — снова притягиваться, т. е. будет вибрировать с двойной частотой. Вибрация приводит к износу магнитной системы и сопровождается гудением.
Для устранения вибрации электромагниты переменного тока снабжаются короткозамкнутыми витками (рис. 19, а) из проводниковых материалов (медь, латунь), охватывающими часть полюса электромагнита (70 — 80 %).
Принцип работы витка заключается в следующем. Общий поток электромагнита Ф разветвляется на поток Ф1 который проходит по не охваченной витком части полюса, и на поток Ф2, который проходит через часть, охватываемую короткозамкнутым витком. При этом в витке индуцируется ЭДС екз и возникает ток Iкз, сдвинутый по отношению к екз на угол ![]()
![]() 0 и определяемый весьма незначительной индуктивностью витка. Для упрощения принимаем
0 и определяемый весьма незначительной индуктивностью витка. Для упрощения принимаем ![]()
![]() 0 = 0. Ток Iкз возбуждает магнитный поток Фкз, который охватывает короткозамкнутый виток и вместе с частью основного потока образует поток Ф2, проходящий через часть полюса, охваченную витком, и сдвинутый во времени по отношению к потоку Ф, на угол ц (рис. 19, б и в).
0 = 0. Ток Iкз возбуждает магнитный поток Фкз, который охватывает короткозамкнутый виток и вместе с частью основного потока образует поток Ф2, проходящий через часть полюса, охваченную витком, и сдвинутый во времени по отношению к потоку Ф, на угол ц (рис. 19, б и в).
Сила притяжения электромагнита Р складывается из двух пульсирующих, но сдвинутых во времени сил Р1 и Р2 (рис. 19, г). Благодаря сдвигу их во времени общая сила Р пульсирует много меньше и минимальное значение её остается выше Ротр, чем и исключается вибрация якоря.
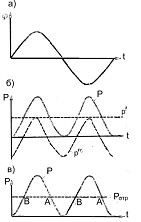
Рис. 18. Кривые изменения силы притяжения электромагнита переменного тока без короткозамкнутого витка
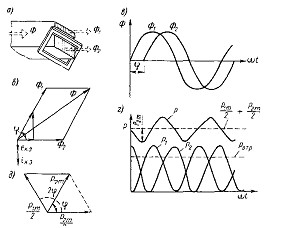
Рис. 19. Принцип работы короткозамкнутого витка в электромагнитных системах переменного тока
3.3. Статические тяговые характеристики электромагнитов и механические характеристики аппаратов
Для удерживающих электромагнитов интерес представляет только сила Р, создаваемая электромагнитом при неизменном (притянутом) положении детали.
Для притягивающих электромагнитов нас интересует зависимость создаваемого электромагнитом усилия от рабочего зазора Р = f(д) или зависимость момента от угла раствора якоря М = f(б), так как для приведения в действие того или иного аппарата необходимо преодолеть его противодействующие силы, изменяющиеся по ходу якоря у разных аппаратов по-разному. Под механической характеристикой аппарата понимают зависимость суммарной силы сопротивления, противодействующей перемещению подвижной системы, от хода якоря. Суммарная сила сопротивления складывается из противодействующих сил отключающих и контактных пружин, веса подвижной системы и сил трения в подшипниках и шарнирах между подвижными деталями. При этом противодействующие силы пружин и веса всегда направлены в одну сторону независимо от направления перемещения якоря, силы трения меняют свое направление в зависимости от направления движения якоря. Характеристики обычно строятся: для прямоходовых подвижных систем в осях «противодействующая сила Ротр — рабочий зазор д», для поворотных магнитных систем в осях «противодействующий момент Мотр — угол поворота б», где Ротр и Мотр — соответственно отрывные усилие и момент.
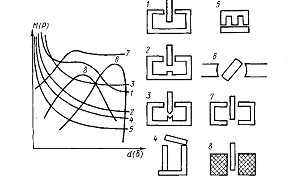
Рис. 20. Статические тяговые характе-ристики некоторых электромагнитных систем 1 — 8 — формы систем и соответствующие им характеристики
При включении Ротр = Рпруж ![]()
![]() G + Ртр и соответственно Мотр = Мпруж
G + Ртр и соответственно Мотр = Мпруж ![]()
![]() G + М тр;
G + М тр;
При отключении Ротр = Рпруж ![]()
![]() G - Ртр и соответственно Мотр = Мпруж
G - Ртр и соответственно Мотр = Мпруж ![]()
![]() G - М тр,
G - М тр,
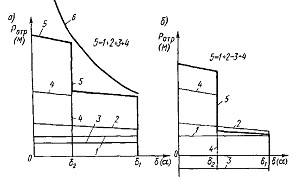
Рис. 21. Механическая характеристика контактора: а — при включении; б — при отключении
где Рпруж — усилия, создаваемые отключающими и контактными пружинами; С — вес подвижной системы, в зависимости от конструкции вес может противодействовать ( + ) или помогать ( —) включению; Ртр, — силы трения.
В общем случае механическая характеристика представляет собой ломаную линию (рис.21). В качестве примера рассмотрим построение механической характеристики электромагнитного контактора при включении и отключении. В точке д1 действуют вес подвижной системы (кривая 1), сила отключающей пружины (кривая 2) и силы трения (кривая 3). При движении якоря Ротр возрастает за счет дополнительного сжатия отключающей пружины. В точке д2 происходит соприкосновение контактов, при этом Ротр возрастает сначала скачкообразно за счет начального нажатия (кривая 4), а затем плавно за счет дополнительного сжатия контактных пружин. Кривая 5 представляет собой сумму кривых 1—4 и является механической характеристикой рассматриваемого аппарата.
Тяговая характеристика Р (кривая 6) представляет собой зависимость силы притяжения электромагнита от зазора (соответственно зависимость момента притяжения от угла поворота якоря). Движение якоря начнется, когда электромагнитная сила притяжения при д = д1 станет больше противодействующей. Для обеспечения четкого и надежного включения аппарата тяговая характеристика должна лежать выше механической и соответствовать ей. В зависимости от конструкции и рода тока электромагнита могут быть получены различного рода статические тяговые характеристики, как это показано на рис. 20.
Расположение катушки в магнитной системе относительно рабочего зазора в значительной степени определяет поток рассеяния. Таким образом, при данной МДС значение силы притяжения электромагнита также зависит от расположения катушки в магнитной системе. Большая сила притяжения получается, когда рабочий зазор расположен внутри катушки. При этом катушка должна быть смещена в сторону якоря.
3.4. Замедление и ускорение действия электромагнита
В ряде случаев на практике необходимо замедлить или ускорить действие электромагнита.
Замедление действия электромагнита постоянного тока может быть достигнуто увеличением его постоянной времени, либо увеличением индуктивности самой катушки, либо последовательным включением дополнительной катушки индуктивности L (рис. 22, а). Последнее применяется редко. Включение параллельно катушке конденсатора С (рис. 22,б) также дает замедление срабатывания. При соответствующем подборе емкости нарастание напряжения на катушке происходит постепенно по мере заряда конденсатора.
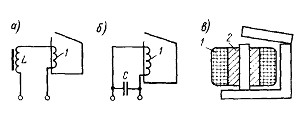
Рис. 22. Схемы замедления срабатывания электромагнита
1 — катушка; 2 — короткозамкнутая обмотка
Широко применяется замедление действия электромагнита при помощи короткозамкнутого витка, имеющего малое электрическое сопротивление (рис. 22, в). Короткозамкнутый виток (обмотка) замедляет нарастание потока при включении электромагнита и в гораздо большей степени его уменьшение при отключении электромагнита.
При отсутствии короткозамкнутого витка нарастание тока в катушке происходило бы по кривой 1 (рис. 23, а), а потока и тяговой силы — по кривой 4. В момент времени
t =t1 тяговое усилие достигло бы значения силы трогания Ртр = Ротр и якорь начал бы двигаться. При наличии короткозамкнутого витка ток в катушке будет изменяться по кривой 2, а индуцированный в витке ток — по кривой 3. Ток в витке направлен встречно току в катушке. Поток в системе обусловлен разностью токов в катушке и короткозамкнутом витке и будет нарастать по кривой 5. Поток и тяговое усилие достигнут соответственно значений Фтр и Ртр через время t/1 > t1. Срабатывание электромагнита будет замедленно на время Дt, которое носит название выдержки времени на включение.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
