


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Базисом векторного подпространства L называется такая упорядоченная система линейно независимых векторов, что любой вектор подпространства L является линейной комбинацией данной системы векторов.
Все базисы подпространства состоят из одного и того же числа векторов. Это число называется размерностью подпространства. Оно должно быть не больше трех. Если L не совпадает со всем пространством V, то его размерность меньше, чем три.
Примеры подпространств пространства V.
1. Множество всех векторов, параллельных одной и той же прямой, является одномерным векторным подпространством пространства V1.
В={![]() } - аффинный базис
} - аффинный базис
В={![]() }- ортонормированный базис
}- ортонормированный базис
![]() 0 1
0 1
![]() 2. Множество всех векторов, параллельных одной и той же плоскости, называется двумерным векторным подпространством пространства V2.
2. Множество всех векторов, параллельных одной и той же плоскости, называется двумерным векторным подпространством пространства V2.
В={![]() } - аффинный базис,
} - аффинный базис, ![]() не коллинеарен
не коллинеарен![]()
В={![]() },
}, ![]() , ортонормированный базис
, ортонормированный базис
 |
![]()
![]()
![]()
![]()
![]()
В данном подпространстве справедливы все утверждения, сформулированные для координат вектора в пространстве.
3.Если множество состоит только из одного нулевого вектора, то оно называется нулевым подпространством. Его размерность равна 0.
Глава 2. Метод координат на плоскости
10. Аффинная система координат на плоскости.
Прямоугольная декартова система координат
Пусть V2 двумерное векторное подпространство, т. е. множество всех векторов параллельных некоторой плоскости. Любые два неколлинеарных вектора, взятых в определенном порядке, образуют его базис.
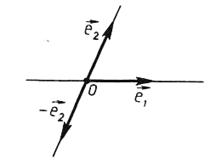
Определение. Тройка, состоящая из точки О и базиса ![]() называется аффинной системой координат на плоскости и обозначается О
называется аффинной системой координат на плоскости и обозначается О![]() . Точка О - начало координат,
. Точка О - начало координат, ![]() координатные векторы. Направленные прямые, проходящие через начало координат и параллельные координатным векторам, на которых положительные направления определяются этими векторами, называются осями координат. Ось координат, на которой положительное направление определяется вектором
координатные векторы. Направленные прямые, проходящие через начало координат и параллельные координатным векторам, на которых положительные направления определяются этими векторами, называются осями координат. Ось координат, на которой положительное направление определяется вектором ![]() - ось абсцисс и обозначается Ох, а другая ось - ось ординат и обозначается Оу. Иногда систему координат О
- ось абсцисс и обозначается Ох, а другая ось - ось ординат и обозначается Оу. Иногда систему координат О![]() обозначают через Оху. Положительные направления осей определяются координатными векторами.
обозначают через Оху. Положительные направления осей определяются координатными векторами.
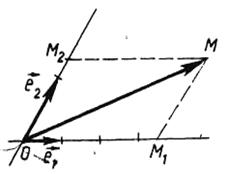 |
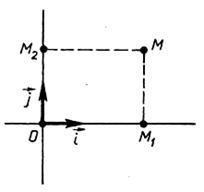
Пусть О![]() — аффинная система координат на плоскости, а М — произвольная точка плоскости. Вектор
— аффинная система координат на плоскости, а М — произвольная точка плоскости. Вектор ![]() называется радиус-вектором точки М (относительно точки О).
называется радиус-вектором точки М (относительно точки О).
Координаты х и у вектора OM в базисе ![]() называются координатами точки М в системе координат О
называются координатами точки М в системе координат О![]() . Число х называется абсциссой точки М, а число у- ординатой. Таким образом, координатами точки М в системе О
. Число х называется абсциссой точки М, а число у- ординатой. Таким образом, координатами точки М в системе О![]() называются числа х, у такие, что
называются числа х, у такие, что
 у
у
Если х=0, то М![]() Oу,
Oу,
y=0, то М![]() Oх
Oх
![]()
О
![]() х
х
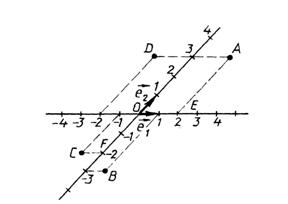
Пример. Построить точки А(2;3), В(1;-3), С(-1;-2), Д(-2;3), Е(3;0).
 |
11. Простейшие задачи метода координат на плоскости
 Задача 1. А
Задача 1. А
О В
В аффинной системе координат даны две точки А(х1,у1) и В(х2,у2). Найти координаты вектора![]() .
.
![]() . Но векторы
. Но векторы ![]() и
и ![]() являются радиус-векторами точек А и В. Поэтому
являются радиус-векторами точек А и В. Поэтому ![]() (х1,у1) и
(х1,у1) и ![]() (х2,у2). Таким образом, вектор
(х2,у2). Таким образом, вектор![]() , как разность векторов
, как разность векторов ![]() и
и ![]() , имеет координаты:
, имеет координаты:
![]()
Итак, каждая координата вектора равна разности соответствующих координат конца и начала вектора.
Пример: А(0;-2), В(3;1). Найти ![]() .
.
![]() (3;3)
(3;3)
Определение. Система координат называется прямоугольной декартовой или просто прямоугольной, если ее координатные векторы являются единичными, взаимно-перпендикулярными векторами.
Обозначается ![]() ,
, ![]()
Задача 2. Пусть в прямоугольной системе координат![]() точки А, В имеют координаты А(х1,у1) и В(х2,у2). Вычислить расстояние между точками, т. е длину отрезка АВ. По определению длины вектора АВ=|
точки А, В имеют координаты А(х1,у1) и В(х2,у2). Вычислить расстояние между точками, т. е длину отрезка АВ. По определению длины вектора АВ=|![]() |. По формуле вектор
|. По формуле вектор ![]() имеет координаты
имеет координаты
![]() ,
,
поэтому длина этого вектора вычисляется по формуле
![]()
12. Деление отрезка в данном отношении
Пусть М1 и М2 произвольные точки плоскости,
а λ— некоторое действительное число, причем λ ≠ -1. Точка М делит отрезок ![]() в некотором отношении l, если выполняется условие
в некотором отношении l, если выполняется условие

М2
 Обозначается (М1 М2, М)
Обозначается (М1 М2, М)
![]()
 М
М
М1
Из равенства следует, что векторы ![]() ||
|| ![]() - коллинеарны. Следовательно точка М лежит на прямой М1М2. Если λ›0, то векторы
- коллинеарны. Следовательно точка М лежит на прямой М1М2. Если λ›0, то векторы![]() и
и ![]() одинаково направлены и т. М лежит на отрезке М1М2, если же λ<0, то точка М лежит вне отрезка М1М2.
одинаково направлены и т. М лежит на отрезке М1М2, если же λ<0, то точка М лежит вне отрезка М1М2.
Пусть в аффинной системе координат О![]() концы отрезка М1М2 имеют координаты М1(х1, у1), М2(х2, у2)
концы отрезка М1М2 имеют координаты М1(х1, у1), М2(х2, у2)
Найдем координаты точки М, которая делит отрезок М1М2 в отношении l.
 ;
;
 Þ
Þ![]() ;
;


![]()
 - радиус-векторы точек М, М1, М2, поэтому эти векторы в базисе
- радиус-векторы точек М, М1, М2, поэтому эти векторы в базисе ![]() имеют координаты
имеют координаты ![]() . Отсюда получаем:
. Отсюда получаем:
![]()
Так выражаются координаты х, у точки М, делящей в данном отношении λ отрезок М1М2 через соответствующие координаты концов этого отрезка.
Если точка М – середина М1М2, то ее координаты
![]()
Для любого числа ![]() на прямой М1М2 существует одна и только одна точка М, делящая отрезок М1М2 в отношении l.
на прямой М1М2 существует одна и только одна точка М, делящая отрезок М1М2 в отношении l.
 , прибавим к обеим частям равенства выражение
, прибавим к обеим частям равенства выражение ![]()



 .
.
Отложив вектор ![]()
![]() от точки М, получаем одну и только одну точку М, которая делит отрезок
от точки М, получаем одну и только одну точку М, которая делит отрезок ![]() в отношении
в отношении ![]() .
.
Пример. Построить точки, делящие данный отрезок в отношении![]() .
.
1) l=3
![]() М1 М М2
М1 М М2
Точка М делит ![]() внутренним образом.
внутренним образом.
2)l=-2
![]()
![]() М1 М2 М
М1 М2 М
Точка М делит ![]() делит внешним образом.
делит внешним образом.
3) l=![]()
![]() М М1 М2
М М1 М2
13. Ориентация плоскости
Угол между векторами на ориентированной плоскости
Пусть L – множество всех векторов параллельных плоскости. Любые два линейно независимых вектора из L, взятые в определенном порядке, образуют базис L. В L существует бесконечное множество базисов. Рассмотрим два из них А (![]() ), В
), В ![]() . Разложим векторы базиса В по векторам базиса А.
. Разложим векторы базиса В по векторам базиса А.
![]()
Из координат векторов ![]() и
и ![]() составим матрицу
составим матрицу
 - матрица перехода от базиса А к базису В.
- матрица перехода от базиса А к базису В.
Координаты вектора ![]() образуют 1 столбец,
образуют 1 столбец, ![]() - 2 столбец. Найдем определитель этой матрицы, т. е число с11с22-с12с21.
- 2 столбец. Найдем определитель этой матрицы, т. е число с11с22-с12с21.
![]() , так как векторы
, так как векторы ![]() не коллинеарны.
не коллинеарны.
Свойства определителей матрицы перехода от одного базиса к другому.
Для того, чтобы на плоскости выбрать ориентацию, достаточно выбрать один базис и считать его правым.
Обычно правой называют систему, у которой оси Ох и Оу расположены, как большой и указательный палец правой руки, если смотреть на раскрытую ладонь
 |
Система (О,![]() ) – правая, система(О,
) – правая, система(О,![]() ) – левая, т.к.
) – левая, т.к.
Если на плоскости задана система координат, то плоскость считается ориентированной.
Введем понятие угла между векторами на ориентированной плоскости.
Пусть ![]() и
и ![]() ненулевые векторы, заданные в определенном порядке
ненулевые векторы, заданные в определенном порядке ![]() - первый вектор,
- первый вектор, ![]() - второй.
- второй.
|
|
 |


![]() В
В
![]()
![]()
О А
![]()
Определение. Если ![]() и
и ![]() не коллинеарны, то направленным (ориентированным) углом между
не коллинеарны, то направленным (ориентированным) углом между ![]() и
и ![]() называется величина
называется величина ![]() , если базис
, если базис![]() правый и величина -
правый и величина -![]() если базис левый.
если базис левый.
Если векторы ![]() одинаково направлены, то ориентированный угол считается равным 0. А если противоположно направлены – 1800. Т. о.
одинаково направлены, то ориентированный угол считается равным 0. А если противоположно направлены – 1800. Т. о.
![]()
Пример.
 |  |
^ ^
![]() =300
=300 ![]() =-900
=-900
14. Формулы преобразования координат
Рассмотрим на плоскости 2 аффинные системы координат (О![]() ) и (О'
) и (О'![]() ). Первую систему назовем старой, вторую – новой.
). Первую систему назовем старой, вторую – новой.
Пусть М – произвольная точка плоскости, которая в старой системе имеет координаты М(х, у), а в новой М/(х/,у/).
Задача преобразования координат состоит в следующем. Зная координаты нового начала координат, новых координатных векторов в старой системе:
О/(х0; у0), ![]() ,
, ![]()
выразить координаты х, у точки М в старой системе через координаты х/, у/ той же точки в новой системе.
![]()
![]()

![]()
![]()
![]()
 |
![]()
![]()
Так выражаются координаты х и у точки М в старой системе (О![]() ), через ее координаты х/ и у/ в новой системе (О'
), через ее координаты х/ и у/ в новой системе (О'![]() ). Формулы называются формулами преобразования аффинной системы координат. Замечаем, что
). Формулы называются формулами преобразования аффинной системы координат. Замечаем, что
матрица  - составленная из коэффициентов при х/ и у/, есть в точности матрица перехода от базиса
- составленная из коэффициентов при х/ и у/, есть в точности матрица перехода от базиса ![]() к базису
к базису ![]() .
.
Рассмотрим два частных случая преобразования аффинной системы координат.
1. Перенос начала. В этом случае системы (О![]() ) и (О'
) и (О'![]() ) имеют одни и те же координатные векторы, но разные начала.
) имеют одни и те же координатные векторы, но разные начала.
 Т. к.
Т. к. ![]() =
=![]() ,
, ![]() =
=![]() , то матрица перехода от базиса
, то матрица перехода от базиса ![]() к базису
к базису ![]() имеет вид
имеет вид ![]() , формулы преобразования координат запишутся так:
, формулы преобразования координат запишутся так: 
![]()
![]() О´
О´ ![]() (1; 0)
(1; 0)
![]()
![]() (0; 1)
(0; 1)
О ![]()
 =
= ![]()
2. Замена координатных векторов.
Системы координат (О![]() ) и (О
) и (О![]() ) имеют общее начало и отличаются только координатными векторами. В этом случае х0=0, у0=0 (т. к. точки О и О' совпадают). Формулы примут вид:
) имеют общее начало и отличаются только координатными векторами. В этом случае х0=0, у0=0 (т. к. точки О и О' совпадают). Формулы примут вид:
![]()
![]()
![]()
![]()
![]()
![]()
О
Преобразование прямоугольных систем координат
Так как прямоугольная система координат - частный случай аффинной системы координат, то при переходе от одной системы координат к другой можно использовать те же формулы, но на элементы сij накладываются дополнительные ограничения.
Пусть ![]() и
и ![]() ориентированы одинаково, имеют правую ориентацию
ориентированы одинаково, имеют правую ориентацию ![]() . Формулы преобразования имеют вид:
. Формулы преобразования имеют вид:
Частные случаи.
Если обе системы имеют общее начало О, то говорят, что система координат ![]() , получена из системы
, получена из системы ![]() поворотом точки О на угол α.
поворотом точки О на угол α.
 |
![]()
![]()
![]()
![]()
α
О
![]()
![]() →
→![]() , т. к. О=О'
, т. к. О=О'
Пусть ![]() и
и ![]() ориентированы противоположно. Формулы имеют вид:
ориентированы противоположно. Формулы имеют вид:
Здесь ![]()
Формулы можно объединить в одной записи:
ε=1, если ориентация одинаковая,
ε=-1, если ориентация разная.
15. Полярная система координат
Зададим на ориентированной плоскости точку О и единичный вектор ![]() .
.
Определение. Пара, состоящая из точки О и вектора ![]() называется полярной системой координат. И обозначается (О;
называется полярной системой координат. И обозначается (О; ![]() ) или О
) или О![]()
М
![]()
ρ
![]()
![]() О φ
О φ
![]()
![]() Р
Р
Ось ОР, проходящая через точку О и параллельная вектору ![]() ,называется полярной осью. Точка О – полюс.
,называется полярной осью. Точка О – полюс.
Пусть М – произвольная точка плоскости. Обозначим через  , а через φ – направленный угол между
, а через φ – направленный угол между ![]() и
и ![]() ,
, ![]() .
.
Числа ρ и φ – однозначно определяют положение точки М на плоскости и называются полярными координатами точки М в полярной системе координат - М (ρ; φ). Число ρ называется полярным радиусом или первой полярной координатой, а число φ – полярным углом или второй полярной координатой.
Если точка М совпадает с точкой О, то ρ считается равным 0, а φ – неопределен.
Пример. Построим в полярной системе координат точки
А (2; ![]() ), В (3; 0), С (1;
), В (3; 0), С (1; ![]() ), Д (
), Д (![]() ), F (2; -
), F (2; -![]() )
)
![]()
![]() Д А
Д А
![]()
![]() О
О
![]()
![]() В р
В р
С
![]()
F![]()
Полярный радиус ρ любой точки неотрицателен и может изменятся на [О;![]() ). Полярный угол φ точки изменяется в пределах -π≤φ≤π.
). Полярный угол φ точки изменяется в пределах -π≤φ≤π.
К каждой полярной системе координат О![]() можно присоединить положительно ориентированную прямоугольную декартову систему координат
можно присоединить положительно ориентированную прямоугольную декартову систему координат ![]() , началом которой служит полюс О, первым координатным вектором – вектор
, началом которой служит полюс О, первым координатным вектором – вектор ![]() и (
и (![]() )=
)= ![]() .
.
![]()
 у
у
ρ
![]() φ х
φ х
Пусть ρ и φ – полярные координаты точки М, отличной от точки О, а х и у – ее координаты в присоединенной прямоугольной системе координат. Тогда ![]() и φ=(
и φ=(![]() ,
,![]() ). Тогда
). Тогда
![]()
Зная полярные координат ρ и φ точки М, по формуле найдем прямоугольные координаты х и у этой точки. Находим: х2+у2=ρ2, и значит
ρ=![]() ,
, ![]() ,
,  .
.
Вывод: зная прямоугольные координаты х и у точки М, отличной от начала координат можно найти полярные координаты ρ и φ этой точки, пользуясь выведенными формулами и наоборот.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
