

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Передаточное отношение эквивалентной цилиндрической передачи определяется следующим соотношением:
 (78)
(78)
Геометрия боковых поверхностей и профилей зубьев теснейшим образом связана с технологией изготовления конических колес. Способ копирования фасонного профиля инструмента для образования профиля на коническом колесе не может быть использован, ибо размеры впадины конического колеса изменяются по мере приближения к вершине конуса. В связи с этим такие инструменты, как модульная дисковая фреза, пальцевая фреза, фасонный шлифовальный круг, могут использоваться только для черновой прорезки впадин или для образования впадин колес не выше 8-й степени точности.
Для нарезания более точных конических колес используют способ обкатки в станочном зацеплении нарезаемой заготовки с воображаемым производящим колесом. Боковые поверхности производящего колеса образуются за счет движения режущих кромок инструмента в процессе главного движения резания, обеспечивающего срезание припуска. Преимущественное распространение получили инструменты с прямолинейным лезвием. При прямолинейном главном движении прямолинейное лезвие образует плоскую производящую поверхность. Такая поверхность не может образовать эвольвентную коническую поверхность со сферическими эвольвентными профилями. Получаемые сопряженные конические поверхности, отличающиеся от эвольвентных конических поверхностей, называют квазиэвольвентными (по старой терминологии –– октоидальными).
Производящие колеса могут быть плоскими с ![]() = 90° (рис. 36, а, б) или плосковершинными с
= 90° (рис. 36, а, б) или плосковершинными с ![]() = 90° –
= 90° – ![]() (рис. 36, в) при одном и том же угле
(рис. 36, в) при одном и том же угле ![]() при вершине аксоидного конуса станочного зацепления. В первых двух случаях образуемые квазиэвольвентные конические колеса будут сопряженными, ибо производящие плоские колеса образуют совпадающую пару, у которой боковые производящие поверхности зубьев могут совпадать при наложении во всех своих точках (как отливка и форма или шаблон и контршаблон). Однако станок, реализующий схему станочного зацепления по рис. 36, а, должен иметь поворотные направляющие, допускающие установку резцовых направляющих под углом (90° – –
при вершине аксоидного конуса станочного зацепления. В первых двух случаях образуемые квазиэвольвентные конические колеса будут сопряженными, ибо производящие плоские колеса образуют совпадающую пару, у которой боковые производящие поверхности зубьев могут совпадать при наложении во всех своих точках (как отливка и форма или шаблон и контршаблон). Однако станок, реализующий схему станочного зацепления по рис. 36, а, должен иметь поворотные направляющие, допускающие установку резцовых направляющих под углом (90° – – ![]() ), где
), где ![]() –– угол ножки зуба нарезаемого колеса в станочном зацеплении. Это усложняет конструкцию станка и используется ограниченно.
–– угол ножки зуба нарезаемого колеса в станочном зацеплении. Это усложняет конструкцию станка и используется ограниченно.
В случае движения резцов без учета угла ![]() (см. рис. 36, б) высота ножки зуба по мере приближения к вершине конуса остается неизменной, что ослабляет зуб и приводит иногда к подрезу ножки.
(см. рис. 36, б) высота ножки зуба по мере приближения к вершине конуса остается неизменной, что ослабляет зуб и приводит иногда к подрезу ножки.
Большинство моделей станков использует плосковершинное производящее колесо, у которого вершины зубьев расположены в плоскости, а угол аксоидного конуса в станочном зацеплении рассчитывается с учетом угла ![]() ножки зуба нарезаемого колеса. Два плосковершинных колеса не образуют совпадающую производящую пару, и поэтому нарезаемые квазиэвольвентные колеса будут несопряженными. Эти погрешности обычно являются незначительными и ими обычно пренебрегают.
ножки зуба нарезаемого колеса. Два плосковершинных колеса не образуют совпадающую производящую пару, и поэтому нарезаемые квазиэвольвентные колеса будут несопряженными. Эти погрешности обычно являются незначительными и ими обычно пренебрегают.
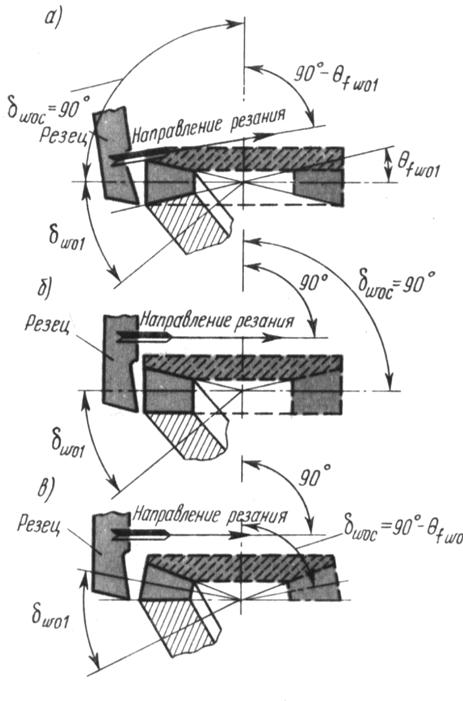
Рис. 36. Методы нарезания зубьев
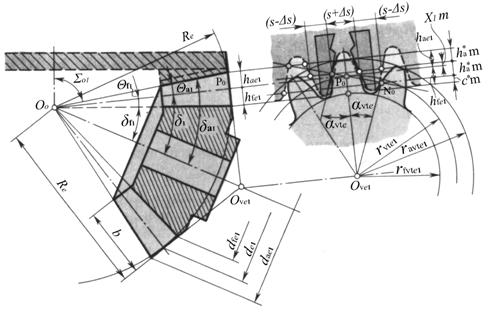
Рис. 37. Схема нарезания зубьев
Расчетная схема, приведенная на рис. 37, позволяет на базе станочного зацепления конического колеса с производящим плосковершинным колесом перейти к эквивалентному станочному зацеплению с теоретическим исходным контуром. Исходный контур, совпадающий с реечным контуром, принятым в качестве базового для определения теоретических форм и размеров зубьев конических колес, регламентирован по ряду параметров: ![]() =20°;
=20°; ![]() =1,2; с*=0,2;
=1,2; с*=0,2; ![]()
![]() 0,3. Однако с учетом особенностей методов нарезания зубьев эти параметры можно изменять в пределах использования стандартного инструмента. Так, например, можно допускать неравенство толщины зуба и ширины впадины по делительной прямой за счет относительного расположения соседних резцов; не требуется строгого соответствия номинального модуля резцов модулю нарезаемого колеса. Внешний модуль может быть нестандартным и даже дробным. Можно изменять угол a за счет наклона резцов.
0,3. Однако с учетом особенностей методов нарезания зубьев эти параметры можно изменять в пределах использования стандартного инструмента. Так, например, можно допускать неравенство толщины зуба и ширины впадины по делительной прямой за счет относительного расположения соседних резцов; не требуется строгого соответствия номинального модуля резцов модулю нарезаемого колеса. Внешний модуль может быть нестандартным и даже дробным. Можно изменять угол a за счет наклона резцов.
8. ПЕРЕДАЧИ С ВИНТОВЫМИ КОЛЕСАМИ
Гиперболоидные зубчатые передачи
В зубчатой передаче со скрещивающимися осями вращения колес относительное движение колес для данного мгновения может быть представлено как вращение вокруг мгновенной винтовой оси с одновременным скольжением вдоль нее. При постоянном передаточном отношении мгновенная винтовая ось занимает постоянное положение в неподвижном пространстве; аксоидами относительного движения являются однополостные гиперболоиды вращения. Поэтому зубчатую передачу со скрещивающимися осями вращения колес называют гиперболоидной.
Начальной поверхностью колеса называется относящаяся к данному зубчатому колесу в передаче одна из взаимокасающихся соосных поверхностей вращения, в любой точке касания которых проходящие через нее линии зубьев колес имеют общую касательную, и вектор скорости относительного движения колес направлен вдоль нее или равен нулю. Размеры начальных поверхностей могут существенно отличаться от размеров аксоидных гиперболоидов. В качестве начальных поверхностей могут быть приняты более простые по своей форме поверхности, например, круглые цилиндры, касающиеся друг друга только в одной точке, лежащей на линии кратчайшего расстояния между осями колес.
Гиперболоидная зубчатая передача, у зубчатых колес которой начальные поверхности –– круглые цилиндры, называется винтовой зубчатой передачей. Если в качестве начальных поверхностей зубчатых колес применить конусы с несовпадающими вершинами, то получим гипоидную зубчатую передачу.
Винтовая зубчатая передача
Винтовая зубчатая передача состоит из двух эвольвентных цилиндрических косозубых колес, оси которых скрещиваются под произвольным углом ![]() . Межосевой угол
. Межосевой угол ![]() где
где ![]() и
и ![]() –– углы наклона линий зубьев (винтовых линий) по начальным цилиндрам; верхний знак соответствует одноименному направлению винтовых линий, нижний –– разноименному. В винтовой передаче эти углы в общем случае не одинаковы.
–– углы наклона линий зубьев (винтовых линий) по начальным цилиндрам; верхний знак соответствует одноименному направлению винтовых линий, нижний –– разноименному. В винтовой передаче эти углы в общем случае не одинаковы.
В частном случае ортогональной передачи ![]() а направление винтовых линий зубьев обоих колес –– одинаковое (оба правые или оба левые). Рассмотрим зубчатую передачу с межосевым углом
а направление винтовых линий зубьев обоих колес –– одинаковое (оба правые или оба левые). Рассмотрим зубчатую передачу с межосевым углом ![]() = 90°.
= 90°.
На рис. 38 показаны три проекции начальных цилиндров винтовой передачи с радиусами ![]() и
и ![]() и концентричные им основные цилиндры с радиусами
и концентричные им основные цилиндры с радиусами ![]() и
и ![]() . Винтовые линии на начальных цилиндрах показаны в положении касания в точке Р –– полюсе зацепления, n–n –– нормаль к ним. Общая касательная t–t составляет с осями колес соответственно углы
. Винтовые линии на начальных цилиндрах показаны в положении касания в точке Р –– полюсе зацепления, n–n –– нормаль к ним. Общая касательная t–t составляет с осями колес соответственно углы ![]() и
и ![]() , сумма которых равна углу
, сумма которых равна углу ![]() .
.
Касательно к основным цилиндрам через полюс зацепления Р проходят образующие плоскости Еb1 и Еb2, в которых расположены прямолинейные образующие боковые поверхности зубьев, составляющие углы ![]() и
и ![]() , с осями колес.
, с осями колес.
В передачах с параллельными осями производящие плоскости обоих колес сливаются в одну, являющуюся плоскостью зацепления, а боковые поверхности зубьев из-за равенства углов  соприкасаются по общей образующей (линейный контакт). При скрещивающихся осях производящие плоскости пересекаются по прямой, представляющей собой геометрическое место точек контакта боковых поверхностей зубьев, называемой линией зацепления. Она проходит через точку Р касания начальных цилиндров касательно к обоим основным цилиндрам колес. Проекции линии зацепления совпадают с проекциями плоскостей Еb1 и Еb2 и составляют в торцовых сечениях колес различные по величине углы зацепления
соприкасаются по общей образующей (линейный контакт). При скрещивающихся осях производящие плоскости пересекаются по прямой, представляющей собой геометрическое место точек контакта боковых поверхностей зубьев, называемой линией зацепления. Она проходит через точку Р касания начальных цилиндров касательно к обоим основным цилиндрам колес. Проекции линии зацепления совпадают с проекциями плоскостей Еb1 и Еb2 и составляют в торцовых сечениях колес различные по величине углы зацепления ![]() и
и ![]() , величины которых определяются по формуле, известной из теории эвольвентных цилиндрических передач. Предельные точки N1 и N2 линии зацепления отмечены на основных цилиндрах на трех проекциях. Активная длина линии зацепления определяется точками В1 и В2 пересечения линии зацепления поверхностями цилиндров вершин зубьев колес с радиусами
, величины которых определяются по формуле, известной из теории эвольвентных цилиндрических передач. Предельные точки N1 и N2 линии зацепления отмечены на основных цилиндрах на трех проекциях. Активная длина линии зацепления определяется точками В1 и В2 пересечения линии зацепления поверхностями цилиндров вершин зубьев колес с радиусами ![]() и
и ![]() . Линия зацепления N1N2 является общей нормалью к боковым поверхностям зубьев обоих колес.
. Линия зацепления N1N2 является общей нормалью к боковым поверхностям зубьев обоих колес.
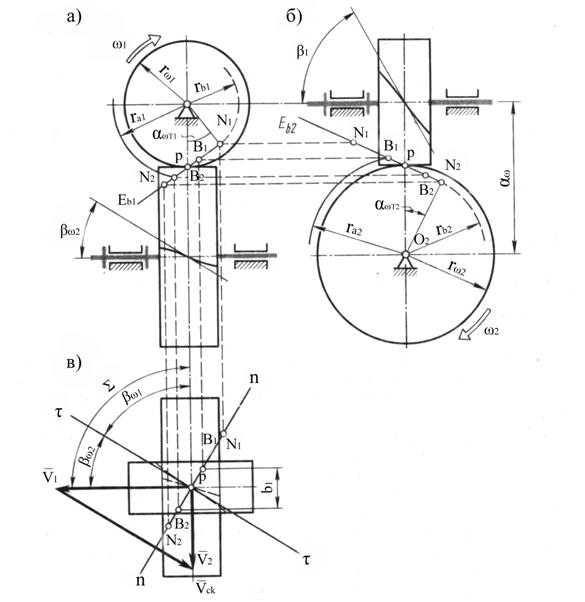
Рис. 38. Винтовая зубчатая передача:
а) вид спереди; б) вид сбоку; в) вид
сверху и план скоростей
Из рассмотрения плана скоростей (см. рис. 39, в), построенного для контактной точки, совпадающей с полюсом Р, исходя из равенства нормальных составляющих ![]() окружных скоростей, очевидно, что
окружных скоростей, очевидно, что ![]() , так как
, так как ![]() и
и ![]() , тогда
, тогда ![]() откуда
откуда
 . (79)
. (79)
Таким образом, особенность винтовой зубчатой передачи состоит в том, что передаточное отношение этой передачи зависит не только от отношения радиусов ![]() и
и ![]() , как это имело место для цилиндрических передач с одинаковыми углами наклона линий зубьев, но и от величин углов
, как это имело место для цилиндрических передач с одинаковыми углами наклона линий зубьев, но и от величин углов ![]() и
и ![]() .
.
Из формулы (79) видно, что одно и то же передаточное отношение может быть получено путем многочисленных комбинаций радиусов начальных цилиндров и углов наклона на них линий зубьев, из которых следует выбирать те, которые наилучшим образом удовлетворяют качественным показателям, заданным при проектировании.
Винтовая зубчатая передача обладает еще одним свойством: при заданном направлении вращения ведущего колеса возможно изменить направление вращения ведомого за счет изменения направления винтовых линий зубьев.
В нормальном сечении шаг и модуль для обоих колес винтовой передачи одинаковы, поэтому применительно к передаче, у которой начальные и делительные цилиндры сливаются, имеем ![]() в торцовых же сечениях модули разные:
в торцовых же сечениях модули разные: ![]() и
и ![]() .
.
Радиусы делительных и начальных цилиндров определяются по формулам:
 .
.
Межосевое расстояние для такой передачи
 .
.
Все исполнительные размеры колес (например, диаметры вершин, высота и толщина зубьев) определяют по формулам для косозубых колес.
Скорость скольжения боковых поверхностей зубьев в направлении общей касательной к винтовым поверхностям зубьев для контактной точки, совпадающей с полюсом Р, определим из треугольника скоростей на рис. 38, в:

Скорость скольжения зубьев колес винтовой передачи при контакте их в полюсе не равна нулю.
Для получения минимальных габаритов передачи из условия прочности угол наклона ![]() винтовой линии зуба на ведущем колесе следует брать для ускоряющих передач (u12<1) в пределах 30...35°, для замедляющих (u12>1) –– в пределах 50...60°, для передач c u12 = 1 –– в пределах 45...50°.
винтовой линии зуба на ведущем колесе следует брать для ускоряющих передач (u12<1) в пределах 30...35°, для замедляющих (u12>1) –– в пределах 50...60°, для передач c u12 = 1 –– в пределах 45...50°.
Как уже указывалось, контакт боковых поверхностей зубьев у рассматриваемой зубчатой передачи теоретически происходит в одной точке, практически же вследствие износа и деформации материала –– по небольшой площадке. В результате на рабочих поверхностях зубьев возникают высокие контактные напряжения, которые в сочетании со значительным скольжением профилей и при отсутствии условий для создания масляного клина могут привести к заеданию рабочих поверхностей зубьев. Поэтому винтовые зубчатые передачи, как правило, используются при относительно небольших мощностях при непрерывном и обильном смазывании.
Червячная зубчатая передача
Эта передача является частным случаем гиперболоидной зубчатой передачи. Угол скрещивания осей в большинстве случаев равен 90°. Передача состоит из червяка и червячного колеса. Червяком называется косозубое зубчатое колесо, линия зубьев которого делает один или более оборотов вокруг его оси. Число зубьев червяка z1 называют числом заходов; z1 чаще всего равно 1, 2, 4. Червячное колесо нарезают фрезой, представляющей собой точную копию червяка. Поэтому в червячных передачах касание витков червяка и зубьев колеса происходит по линии (линейный контакт). Для увеличения соприкосновения ободу червячного колеса придают форму, при которой колесо охватывает червяк. Числа зубьев червячного колеса принимают равными 32...80, иногда 200...300, а в отдельных случаях до 1000.
Как правило, в червячной передаче ведущим является червяк, поэтому червячная передача чаще всего работает как замедляющая.
Передаточное число червячной передачи выражается равенством ![]() . Передаточное число колеблется в пределах от 8 до 80, а в специальных случаях до 1000.
. Передаточное число колеблется в пределах от 8 до 80, а в специальных случаях до 1000.
Наиболее распространенными видами червячных зубчатых передач являются передачи с цилиндрическим червяком и глобоидные передачи.
Глобоидные червячные передачи, благодаря более благоприятным условиям зацепления (хорошим гидродинамическим условиям смазки, обеспечивающим устойчивый масляный клин в зоне контакта), могут передавать большие мощности, чем передачи с цилиндрическим червяком.
Рассмотрим схему зацепления червячного колеса с архимедовым червяком (рис. 39, а, б). Боковая поверхность витка архимедова червяка представляет собой линейчатую винтовую поверхность, сечение которой плоскостью, перпендикулярной оси, дает архимедову спираль. В осевом сечении эти червяки имеют прямолинейный профиль витка обычно с углом профиля ![]() =20°. Взаимодействие такого червяка и червячного колеса в плоскости, перпендикулярной оси колеса, проходящей через ось червяка (средняя плоскость червячной передачи), сводится к зацеплению рейки с прямолинейным и колеса с эвольвентным профилями зубьев, т. е. при рабочем зацеплении червячной передачи воспроизводится станочное зацепление. Делительная прямая реечного профиля совпадает с образующей делительного цилиндра червяка. Поскольку модуль рейки стандартизован, то осевой модуль червяка тоже имеет стандартное значение.
=20°. Взаимодействие такого червяка и червячного колеса в плоскости, перпендикулярной оси колеса, проходящей через ось червяка (средняя плоскость червячной передачи), сводится к зацеплению рейки с прямолинейным и колеса с эвольвентным профилями зубьев, т. е. при рабочем зацеплении червячной передачи воспроизводится станочное зацепление. Делительная прямая реечного профиля совпадает с образующей делительного цилиндра червяка. Поскольку модуль рейки стандартизован, то осевой модуль червяка тоже имеет стандартное значение.
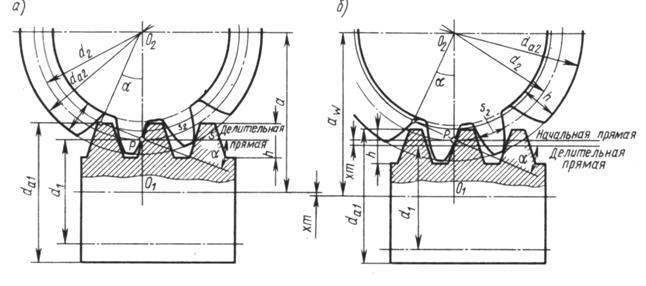
Рис. 39. Взаимодействие архимедова червяка и червячного колеса:
а) без смещения; б) со смещением
9. ПЕРСПЕКТИВНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
Передачи Новикова
удалось открыть принципиально новый класс пространственных зацеплений с точечным контактом для передач с параллельными, пересекающимися и перекрещивающимися осями. Переход к таким системам зацепления позволяет использовать для образования зубьев огромное число новых форм профилей, не взаимоогибаемых и не имеющих общей огибаемой поверхности. Известными методами огибания создать новые системы зацепления не представлялось возможным, поэтому пришлось отказаться от классической теории зацепления Оливье –– Гохмана и разработать свою, базирующуюся на предложенном им новом принципе образования рабочих поверхностей зубьев, названном «методом контактных линий». Если методы огибания исходят из профиля инструмента и отмечены «технологическим подходом» к задаче создания новых видов зубчатых передач, то «метод контактных линий» выражает собой «конструкторский подход» к проблеме. Этот метод исходит от готовой, заданной конструктором формы профилей и поверхностей зубьев, обеспечивающих в первую очередь необходимые прочностные, эксплуатационные и другие достоинства передачи. На базе этой теории самим были предложены новые виды цилиндрических, конических и червячных передач –– передачи Новикова, обладающие значительно более высокой нагрузочной способностью, чем все известные до этого аналогичные типы передач.
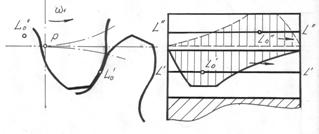
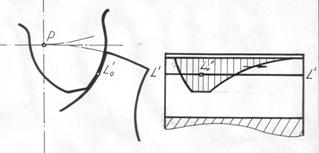
Передачи Новикова имеют одну линию зацепления LL (рис. 40, а). Обычно она направлена от одного торца зубчатого колеса к другому. Линии зацепления в торцовой плоскости здесь нет, в процессе зацепления происходит перекатывание одного зуба по другому по их длине, как показано стрелкой, со скоростью намного большей, чем окружная скорость, что благоприятствует созданию толстой масляной прослойки, снижению потерь на трение и уменьшение износа. Такое перекатывание зубьев по их длине (пространственное зацепление) и является принципиальным отличием передач Новикова от всех видов передач с другими системами зацепления. Соприкосновение профилей взаимодействующих зубьев происходит только в момент пересечения обоими профилями линии зацепления, обозначенной в торцовой плоскости точкой LO (см. рис. 40, а). До этого момента и после него профили зубьев шестерни и колеса не касаются друг друга (рис. 41). Для того чтобы обеспечить непрерывность зацепления на протяжении всего окружного шага, передачи Новикова выполняются косозубыми.
Поскольку вогнутый профиль зуба в таких передачах всегда должен выполняться радиусом R, несколько большим радиуса r, то первоначальный контакт всегда будет точечным, а форма кривой профиля не имеет существенной роли. В настоящее время широкое промышленное применение получили передачи Новикова с формой профилей, очерченной отрезками дуг окружностей в нормальном сечении зуба. Такие исходные контуры зацепления стандартизированы для передач с НВ 320. Имеются передачи Новикова с циклоидальными профилями зубьев (циклоидальные передачи Новикова), с профилями зубьев, очерченными: один удлиненной, а другой укороченной эвольвентой (эвольвентные передачи Новикова), передачи Новикова с эллиптическими профилями зубьев и другие, а также с профилями, скомбинированными из различных кривых. Более подробно остановимся на цилиндрических передачах Новикова.
| а) |
|
| б) | |
Рис. 40. Точечные пространственные системы зацепления: а) заполюсное Новикова; б) дозаполюсное Новикова | Рис. 41. Касание профилей в зацеплении Новикова |
Цилиндрическая передача Новикова состоит из зубчатых колес, у которых выпуклые поверхности зубьев одного колеса имеют контакт, близкий к линейчатому, с вогнутыми поверхностями зубьев другого колеса. Контактная линия на зубьях колес приработанных передач Новикова располагается от головки к ножке примерно перпендикулярно направлению зубьев.
Как уже было сказано, в передачах с зацеплением Новикова зубья расположены также как в косозубых передачах, под постоянным углом к образующей нормальной поверхности. Пара сопряженных колес входит в зацепление постепенно в направлении осей сопряженных колес. Плавность зацепления обеспечивается благодаря перекрытию зубьев только в осевом направлении. В торцовой плоскости колес перекрытие профилей зубьев отсутствует. Радиус кривизны зубьев в плоскости, перпендикулярной к линии контакта, очень невелик, поэтому контактные напряжения невелики и колеса могут передавать большую нагрузку в течение продолжительного времени до появления выкрашивания металла по причине его усталости. Работа с меньшими напряжениями обеспечивается передачей Новикова с двумя линиями зацепления (ДЛЗ). На основе теории Новикова были разработаны новые виды передач: дозаполюсные зубчатые передачи, показавшие большую нагрузочную способность и уже названные передачи со многими линиями зацепления (ДЛЗ).
Авторским свидетельством охватываются практически все пространственные передачи с точечной системой зацепления, работающие на принципе продольного перекатывания зубьев, с любой формой профилей зубьев и любым расположением центров кривизны взаимодействующих профилей зубчатой пары, а также с любой формой линии зацепления и любым законом движения точки зацепления вдоль линии зацепления.
При изменении межосевого расстояния мгновенное передаточное отношение в передачах Новикова остается постоянным. Их нагрузочная способность при изменении межосевого расстояния в пределах существующих допусков на точность изготовления и монтажа также практически остается неизменной. Исследования свидетельствуют, что увеличение межосевого расстояния дозаполюсной передачи Новикова в процессе эксплуатации до 1,6 мм (при нормальном модуле зацепления 10 мм) не вызвало снижения ее нагрузочной способности. Уменьшение межосевого расстояния на 2,5% от модуля приводит к снижению допускаемой нагрузки до 12%.
Заполюсные передачи Новикова с имеющимися на сегодня исходными контурами обеспечивают увеличение контактной прочности в 2–2,1 раза, изломной прочности –– в 1,3–1,5 раза. Другим их преимуществом являются в 2–2,5 раза меньшие потери на трение в зацеплении и в 3–4 раза меньший износ.
Дозаполюсные передачи (рис. 40, б) были разработаны в 1954 году. Как видно из рисунка, дозаполюсная передача имеет две линии зацепления LL и L¢L¢ (передача с ДЛЗ). Если посмотреть на торцовое сечение зубчатых колес, то одна из линий зацепления (точка LO) находится перед полюсной линией Р (до полюса), другая (точка LO) –– за полюсной линией, в направлении вращения ведущего зубчатого колеса.
Дозаполюсные передачи обеспечивают дальнейшее существенное увеличение нагрузочной способности. При этом конфигурация исходного контура, зависящая от многих параметров, оказывает решающее влияние на несущую способность таких передач. Испытания дозаполюсных передач с одним из перспективных исходных контуров показали в сравнении с аналогичными по размерам, материалам и термообработке эвольвентными передачами увеличение нагрузочной способности по излому зубьев в 1,8 раза, по контактной прочности –– в 2,3 раза.
Зубчатые передачи Новикова как с одной, так и с двумя линиями зацепления изготовляются на существующем зуборезном и зубоотделочном оборудовании. Отличие имеет лишь зуборезный инструмент, который профилируется в соответствии с принятым исходным контуром зацепления Новикова.
В настоящее время передачи с заполюсным и дозаполюсным зацеплениями находят все более широкое промышленное применение. Ряд заводов изготовляет их серийно. В настоящее время более 70% всех редукторов общего назначения, выпускаемых специализированными редукторными заводами, изготовляются с дозаполюсным зацеплением. Вес редукторов снижен в среднем в 1,3–1,9 раза.
Волновые зубчатые передачи
Волновая зубчатая передача применяется в приборах и силовых устройствах. При ее использовании обеспечивается кинематическая точность и передача движения в герметично закрытое пространство. Несомненными ее преимуществами по сравнению с другими типами передач являются малые габаритные размеры и масса, простота конструкции, а в отдельных случаях –– более высокий КПД, меньшая стоимость, более высокие эксплуатационные качества. Именно эти свойства обусловливают целесообразность использования волновой зубчатой передачи в высокомоментных приводах машин. Такая передача может быть использована в качестве дифференциального механизма в многоскоростных передачах; многодвигательных и многобарабанных грузоподъемных лебедках; в микроприводах для получения заданной скорости опускания груза; в ремонтных, вспомогательных и пусковых приводах дробилок, вращающихся печей и конвейеров; в ходоуменьшителях траншейных экскаваторов и дорожных машин; в нагружающих устройствах испытательных стендов и других механизмах машин.
Благодаря малым габаритным размерам и соосному исполнению такие передачи можно встраивать в барабаны, ходовые колеса, канатоведущие шкивы и другие исполнительные устройства, использовать вместо открытых зубчатых пар и компоновать передачу в едином корпусе, надежно защищающем ее элементы от внешней среды.
Образование механизма с гибким звеном можно проследить в частности на конструктивном совершенствовании известных сравнительно давно передач с промежуточными элементами. Осуществив упругую связь между этими элементами, можно получить волновую зубчатую передачу.
Замена большого количества промежуточных элементов одним сплошным звеном с зубьями представляет собой качественное преобразование передачи.
Из передач с жесткими сплошными звеньями прототипом волновой зубчатой передачи является планетарная зубчатая передача с внутренним зацеплением и малой разностью чисел зубьев взаимодействующих колес (рис. 42, а, б).
| а) |
| б) |
| в) |
| г) |
Рис. 42. Образование волновой зубчатой передачи
из передач с жесткими звеньями
Осевое упрощенное сечение волновой передачи представлено на рис. 42, в. Оно положено в основу условного обозначения волновой передачи, представленного на рис. 42, г.
Основные звенья передачи принято называть следующим образом: 1 –– гибкое колесо; 2 –– жесткое колесо; 3 –– генератор волн или волнообразователь.
Таким образом, была получена волновая передача из планетарной с жесткими звеньями. Вследствие гибкости одного из звеньев волновая передача имеет некоторые особенности и преимущества по сравнению с планетарной.
Первая особенность заключается в том, что в зацеплении и передаче нагрузки может одновременно участвовать большое число пар зубьев. Чем больше крутящий момент М на гибком звене 1, тем сильнее оно искривляется (рис. 43, а), тем больше пар зубьев находится в зацеплении и тем большую нагрузку может выдержать передача. При отсутствии момента на гибком звене в зацеплении находятся только несколько пар зубьев. Можно увеличить число пар зубьев, находящихся в зацеплении, заменив рассмотренный выше генератор волн кулачком 3 рассчитанного профиля (рис. 43, б). Такой генератор волн, строго определяющий форму деформации гибкого звена, называется генератором фиксированной волны. Условно этот генератор называется также эллиптическим, независимо от действительного профиля кулачка. Генераторы, представленные на рис. 42 и 43, а, называют генераторами свободной волны или роликовыми.
|
| ||
а) | б) |
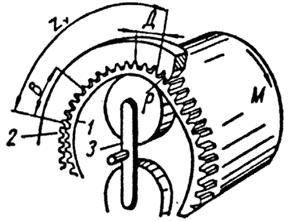
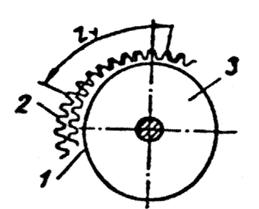
Рис. 43. Особенности взаимодействия звеньев
в волновой зубчатой передаче
Вторая особенность заключается в том, что за счет изменения формы гибкого колеса под нагрузкой или за счет выбранной формы кулачка относительные перемещения зубьев в зацеплении незначительны и в основном происходят в зонах, где нагрузки малы, т. е. в зонах входа в зацепление Д и выхода из зацепления В (см. рис. 43, а). При правильно выбранных параметрах зацепления зубья гибкого колеса 1 перемещаются относительно зубьев жесткого колеса 2 по траектории, обеспечивающей малый путь скольжения зубьев. Скорости скольжения при этом во много раз меньше, чем в передачах с жесткими звеньями, поэтому потери на трение в зацеплении малы, а износ зубьев незначителен.
Третья особенность также обусловлена формой гибкого колеса и заключается в уменьшении углов давления в кинематической паре генератор волн –– гибкое колесо, а следовательно, и в уменьшении потерь энергии в этой паре по сравнению с парой водило –– сателлит.
Все особенности даны в сравнении с передачами, имеющими только жесткие звенья. Они обусловливают преимущества волновых передач –– малые габаритные размеры и высокий КПД (0,85...0,9). КПД волновой передачи в отличие от передач с жесткими звеньями может быть одинаково высок при передаточных отношениях i = 100 и i = 350. Волновые зубчатые передачи целесообразно применять при передаточных отношениях i = 80. При меньших значениях передаточных отношений число зубьев сравнительно небольшое, размеры зубьев по отношению к толщине стенки гибкого колеса велики, деформации гибкого звена в зоне выхода зубьев из зацепления превышают допустимые для применяемых в настоящее время материалов, что приводит к быстрому разрушению гибкого звена. Известны передачи с i = 35...50, но для их изготовления использованы специальные дорогостоящие стали. Эффективность применения волновых передач тем выше, чем больше передаточное отношение. Верхний предел передаточного отношения в одной ступени (350...400) обусловлен малой величиной получаемого модуля зацепления и глубиной захода зубьев. Высота, зубьев при этом становится соизмеримой с величиной отжатия (деформации) звеньев под действием радиальных сил, что сопряжено с проскоком звеньев и разрушением передачи.
Основными критериями работоспособности при современном уровне конструирования волновой передачи являются: прочность оболочки гибкого зубчатого колеса, контактная прочность дорожек качения роликов генератора волн; радиальная жесткость системы генератор волн –– жесткое колесо. Прочность и износостойкость зубьев не отнесены к основным критериям работоспособности, поскольку многопарность зацепления и малые скорости скольжения обусловливают сравнительно невысокие напряжения в зубьях и незначительный износ.
Спироидные передачи
Спироидные передачи по внешнему виду похожи на гипоидные, имеющие большой угол наклона и малое число зубьев ведущего колеса. Ведущим звеном спироидной передачи является спироидный конический червяк с постоянным шагом и углом наклона боковой поверхности витка (винтовые зубья). Е –– смещение конического червяка относительно оси ведомого колеса (рис. 44).
По кинематике зацепления спироидные передачи аналогичны червячным: они также имеют значительное число зубьев в одновременном зацеплении и поэтому могут передавать большие крутящие моменты по сравнению с передачами других видов.
С помощью осевого перемещения червяка в спироидных передачах можно регулировать боковой зазор между зубьями колеса и червяка, а также компенсировать износ зубьев в процессе эксплуатации передачи. Передача дает возможность достигать передаточного отношения 300:1 и больше. С увеличением передаточного числа и смещения конического червяка КПД спироидной передачи уменьшается. При передаточном числе до 25:1 КПД спироидных передач то же, что у червячных передач. В пределах передаточных чисел ниже 25 КПД спироидных передач заметно возрастает. Вследствие небольшого межосевого расстояния между колесом и червяком корпус спироидной передачи может быть очень компактным.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
