

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| Рис. 44. Схематическое изображение спироидной передачи |
По кинематике зацепления спироидные передачи аналогичны червячным: они также имеют значительное число зубьев в одновременном зацеплении и поэтому могут передавать большие крутящие моменты по сравнению с передачами других видов.
С помощью осевого перемещения червяка в спироидных передачах можно регулировать боковой зазор между зубьями колеса и червяка, а также компенсировать износ зубьев в процессе эксплуатации передачи. Передача дает возможность достигать передаточного отношения 300:1 и больше. С увеличением передаточного числа и смещения конического червяка КПД спироидной передачи уменьшается. При передаточном числе до 25:1 КПД спироидных передач то же, что у червячных передач. В пределах передаточных чисел ниже 25 КПД спироидных передач заметно возрастает. Вследствие небольшого межосевого расстояния между колесом и червяком корпус спироидной передачи может быть очень компактным.
Спироидные передачи целесообразно применять в тех случаях, когда требуется получить высокую точность деления, беззазорное зацепление, а также большие передаточные числа в одной паре колес.
Спироидные передачи являются малораспространенными.
Эвольвентно-конические колеса
Можно различать два типа конических эвольвентных зубчатых передач:
1) передачи, составленные из двух конических колес, у которых в сечениях сферы с боковыми поверхностями зубьев можно обнаружить сферическую эвольвенту (рис. 45);
2) передачи, составленные из эвольвентно-конического колеса, у которого в каждом сечении, перпендикулярном к оси колеса, профиль зуба очерчен по плоской эвольвенте, и из цилиндрического обыкновенного эвольвентного колеса.
|
| ||
а) | б) |
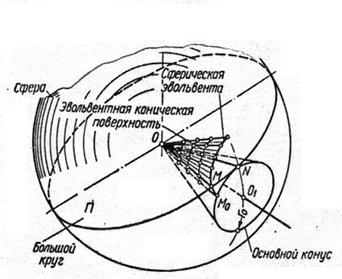
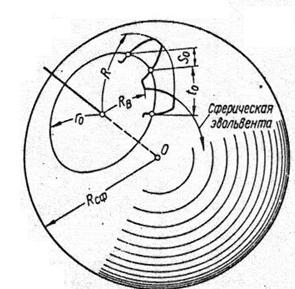
Рис. 45. Образование эвольвентно-конической поверхности:
а) образование эвольвенты; б) параметры эвольвенты
Эвольвентное коническое колесо для передачи первого типа (сферическое) показано на рис. 45. Достаточно одного беглого взгляда на рис. 45, чтобы сразу обнаружить на сфере уже знакомые элементы геометрии эвольвентной плоской передачи. Эго сходство говорит о том, что обыкновенная плоская эвольвентная зубчатая передача является лишь частным случаем конической, сферическо-эвольвентной передачи, когда при бесконечно большом увеличении радиуса Rсф сферы последняя вырождается в плоскость. Само собой разумеется, что геометрия конической эвольвентно-сферической передачи будет более общей, т. е. при некоторых частных значениях параметров она приведет к знакомым расчетным уравнениям, применяемым при проектировании эвольвентной конической зубчатой передачи. Таким образом, все приемы, используемые при проектировании цилиндрических эвольвентных передач, могут быть вполне применены и для конических эвольвентно-сферических передач и, в частности, можно регулировать межосевой угол (соответственно межцентровому расстоянию в цилиндрической передаче) при заданной сумме чисел зубьев, что очень ценно и полезно, например, при проектировании конических планетарных зубчатых механизмов (дифференциалов).
Для зубонарезания этих конических колес необходимо применять инструмент с профильным углом зуба, что приводит к быстрому износу режущей кромки инструмента. Поэтому эвольвентно-сферические передачи не получили до сих пор широкое применение.
Другое положение вещей имеет место в отношении эвольвентно-конических колес, входящих в состав конических передач второго типа. Последние получили применение, например, для зубчатых вариаторов, т. е. для зубчатых механизмов, способных менять (переключать) передаточное отношение под нагрузкой.
Эвольвентно-конические колеса изготовляются методом огибания реечным инструментом. Применение долбяка исключено, так как в этом случае коническое колесо получается неэвольвентным.
При зубонарезании цилиндрического эвольвентного колеса поступательно-возвратное движение реечного инструмента происходит таким образом, что средняя плоскость исходного контура инструмента перемещалась параллельно станочно-поллоидной плоскости или же (при нарезании колес с равноделенным шагом) обе плоскости сливались. При нарезании эвольвентно-конического колеса плоскость перемещается относительно станочно-поллоидной плоскости под некоторым углом (т. е. пересекает ее). Это обусловливает получение у нарезаемого колеса поверхности впадин конической формы. Такие условия станочного зацепления неизбежно приведут к тому, что в каждом сечении, перпендикулярном к оси нарезаемого колеса, расстояние между средней прямой исходного контура инструмента и делительной окружностью колеса будет переменным. Это равносильно тому, что в каждом сечении, перпендикулярном к оси колеса, обеспечиваются условия для нарезания эвольвентного колеса при различном коэффициенте смещения, изменяющемся по закону прямой линии вдоль обода колеса, а профили зубьев его во всех сечениях будут очерчены по эвольвенте.
Разработкой именно передач с использованием эвольвентно-конических колес занималась кафедра технической механики нашего университета.
На основе всего, сказанного выше, можно сказать, что у этих типов зубчатых передач большое будущее. Это обусловлено тем, что эти передачи предоставляют большие возможности при конструировании тех или иных механизмов благодаря их разнообразным свойствам. Т. е. при конструировании механизма с теми или иными заданными параметрами, можно подобрать передачу, которая будет наиболее соответствовать этим требованиям.
10. СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
Развитие техники характеризуется повышением мощности агрегатов и расширением класса быстроходных машин, что обуславливает возрастание их динамической нагруженности и увеличения влияния колебательных явлений на их работу. Именно вибрационное состояние во многом определяет ресурс и надежность машины, интенсивность и характер износа подшипников, точность выполнения заданного технологического процесса и т. п. Вибрация оказывает вредное влияние на организм человека, возникающие при работе машин резонансные явления могут служить причиной серьезных поломок и аварий. В связи с этим проблема снижения уровня вибраций машин приобретает первостепенное значение.
Неспокойная работа и повышенные вибрации машины могут быть вызваны причинами. Однако теоретические и экспериментальные исследования показывают, что основным источником сил, вызывающих вибрацию машины, является неуравновешенное состояние ее вращающихся деталей.
Демпфирование колебаний в машинах с помощью упругих подвесок уменьшает динамические нагрузки на фундамент только на определенных скоростях, на других скоростях такие нагрузки могут даже возрастать. При применении упругих подвесок ротор остается неуравновешенным, поэтому напряжения в нем и нагрузки на опоры не устраняются. В области критической скорости прогибы неуравновешенного ротора, напряжения в нем и реакции в опорах резко возрастают и могут вызывать аварию ротора и опор.
Более эффективно вибрации устраняются балансировкой роторов, выполняемой при их изготовлении и монтаже. Если при этом учтена гибкость ротора и дисбаланс устранен для всех форм, определяющих колебания ротора на соответствующих критических скоростях, то агрегат спокойно работает на всех режимах, если его дисбаланс не изменяется в процессе эксплуатации.
Однако во многих машинах в процессе работы дисбаланс вращающихся деталей изменяет свое первоначальное значение. Причиной этого могут быть дефекты, проявляющиеся при эксплуатации. Имеются также машины, для которых изменение дисбаланса является результатом выполняемого ими технологического процесса.
Статическая балансировка
Ротором в теории балансировки (уравновешивания) называется любое вращающееся тело. Поэтому ротором является якорь электродвигателя, коленчатый вал компрессора, шпиндель токарного станка, баланс часов и т. д.
Давление вращающегося тела на его опоры в общем случае складывается из двух составляющих: статической, вызванной действием заданных сил (силы тяжести тела и др.), и динамической, обусловленной ускоренным движением материальных частиц, из которых состоит вращающееся тело (т. е. ротор). Если динамическая составляющая не равна нулю, то ротор в этом случае называется неуравновешенным.
Неуравновешенность ротора возрастает пропорционально квадрату его угловой скорости. Поэтому, если быстроходные роторы (рабочие колеса турбин, шлифовальные круги, магнитные барабаны ЭВМ и многие другие) неуравновешенны, то они оказывают на свои опоры динамические давления, вызывающие вибрацию стойки (станины) и ее основания. Устранение этого вредного воздействия называется балансировкой (уравновешиванием) ротора. Решение данной задачи относится к динамическому проектированию машин.
Статическая неуравновешенность свойственна такому ротору, центр масс которого не находится на оси вращения, но главная центральная ось инерции которого параллельна оси вращения. Статическая неуравновешенность выражается только главным вектором дисбалансов, в то время как главный момент дисбалансов равен нулю.
Статическая неуравновешенность может быть устранена, если к ротору прикрепить добавочную массу, называемую корректирующей. Ее надо разместить с таким расчетом, чтобы центр корректирующей массы находился на линии действия вектора дисбаланса.
Моментальная неуравновешенность имеет место в том случае, когда центр масс ротора находится на оси вращения, а главная центральная ось инерции ротора наклонена к оси вращения ротора под углом.
Динамическая неуравновешенность является совокупностью двух предыдущих, т. е. моментальной и статической неуравновешенностью.
Ликвидация всякой неуравновешенности –– и статической, и моментальной, и динамической –– имеет своим результатом то, что главная центральная ось инерции ротора совмещается с его осью вращения. В этом случае ротор называется полностью сбалансированным.
Полностью сбалансированный при проектировании ротор после изготовления обладает тем не менее некоторой неуравновешенностью, вызванной неоднородностью материала и отклонениями фактических размеров ротора от их номинальных значений. Такая неуравновешенность устраняется в процессе изготовления на специальных балансировочных станках. Балансировка может быть как автоматической, так и неавтоматической. Рассмотрим статическую и динамическую балансировки, выполняемые в неавтоматическом режиме.
Для роторов с малыми размерами вдоль оси вращения (шкивы, маховики, диски и т. п.) допустимо ограничиться статической балансировкой. При этом определяется только главный вектор дисбалансов. Если требуется невысокая точность балансировки, то она выполняется в статическом режиме.
Более точным и перспективным в отношении автоматизации процесса балансировки является способ определения статической неуравновешенности в процессе вращения ротора, т. е. в динамическом режиме. Одним из примеров оборудования, работающего по этому принципу, служит балансировочный станок (рис. 46). Неуравновешенный ротор 1, закрепленный на шпинделе 4, вращается с постоянной скоростью wб в подшипниках, смонтированных в плите 2. Эта плита опирается на станину посредством упругих элементов 3. С плитой 2 с помощью мягкой пружины 5 связана масса 6 сейсмического датчика. Собственная частота колебаний массы датчика должна быть значительно ниже частоты вращения ротора. Массе 6 дана свобода прямолинейного перемещения вдоль оси X, проходящей через центр масс плиты.
При вращении шпинделя вместе с ротором ось Z под влиянием неуравновешенности ротора описывает коническую поверхность, а плита 2 совершает пространственное движение. Составляющая этого движения, направленная вдоль оси X, воспринимается массой 6. Вынужденные колебания массы относительно плиты 1 преобразуются датчиком в ЭДС, направляемую в электронное счетно-решающее устройство, являющееся неотъемлемой частью балансировочного станка. Это устройство выдает сведения об искомой неуравновешенности в виде модуля и угловой координаты главного вектора дисбалансов ротора. После определения вектора дисбалансов оператор обычно устраняет неуравновешенность способом удаления материала.
| Рис. 46. Статический балансировочный станок |
Динамическая балансировка
Роторы, размеры которых вдоль оси вращения значительны, требуют динамической балансировки, так как главный момент дисбалансов таких роторов будет существенным. Поэтому неуравновешенность будет выражаться не только главным вектором дисбалансов или двумя скрещивающимися векторами дисбалансов, т. е. будет динамической.
Ось вращения ротора в станках, предназначенных для динамической балансировки, может быть или неподвижной, или может двигаться относительно станины. В зависимости от числа возможных движений оси вращения (числа ее степеней свободы) балансировочные станки целесообразно разделить на три группы. К первой группе относятся станки, когда ось вращения балансируемого ротора неподвижна; ко второй –– когда ось вращения колеблется относительно другой, неподвижной оси; к третьей –– когда ось вращения совершает пространственное движение.
Станок, изображенный на рис. 47, относится ко второй группе. Этот станок не имеет электронно-решающих устройств. Балансируемый ротор 1 укладывается на подшипниках рамы 2, которая шарнирно оперта на станину 3. Другая опора рамы –– упругая (5). Вследствие этого рама может покачиваться относительно неподвижной оси О, проходящей через центр шарнира перпендикулярно плоскости рисунка. Вместе с рамой будет покачиваться относительно станины и ротор со своей осью вращения Z.
Рис. 47. Динамический балансировочный станок 2-й группы:
а) схема станка; б) схема балансировки; в) векторная диаграмма
Представим динамическую неуравновешенность ротора в виде двух дисбалансов DA и DB, проведенных к плоскостям коррекции А и В. Метод балансировки предусматривает сначала определение дисбаланса DA, а затем дисбаланса DB. Чтобы при выявлении дисбаланса DA исключить влияние дисбаланса DB, ротор надо уложить на подшипники рамы определенным образом: плоскость коррекции В должна пройти через ось шарнира О. Тогда дисбаланс DВ момента относительно этой оси не даст и, следовательно, на вынужденные колебания системы ротор –– рама влиять не будет.
Приведем ротор во вращение. Момент ![]() вынудит колебания системы ротор –– рама. Амплитуду этих колебаний замерим индикатором 4. Замеры будем проводить при угловой скорости Wb балансировки, равной угловой частоте собственных колебаний системы. С достаточной степенью точности можно считать, что амплитуда вынужденных колебаний пропорциональна дисбалансу, т. е.
вынудит колебания системы ротор –– рама. Амплитуду этих колебаний замерим индикатором 4. Замеры будем проводить при угловой скорости Wb балансировки, равной угловой частоте собственных колебаний системы. С достаточной степенью точности можно считать, что амплитуда вынужденных колебаний пропорциональна дисбалансу, т. е.
SA=moDA, (80) |
где SA –– замерная амплитуда, а DA –– модуль дисбаланса ![]() .
.
Коэффициент пропорциональности mo пока неизвестен, а значит, из уравнения нельзя определить искомый дисбаланс DA. Поэтому следует произвести кроме основного еще два пуска, называемых пробными, откуда описываемый метод балансировки на рамном станке получил название «метод двух пробных пусков».
Перед первым пробным пуском в произвольном месте плоскости коррекции А (например, в точке N с эксцентриситетом еh)к ротору прикрепим пробную массу mn, модуль дисбаланса которой
Dn=mneh. (81) |
Сделаем первый пробный пуск. Теперь колебания с амплитудой S1 будут вынуждаться моментом суммарного дисбаланса
|
причем замерная амплитуда S1 = moD1.
Перед вторым пробным пуском прикрепим в точке N удвоенную пробную массу 2mn, дисбаланс которой также удвоится. Осуществив второй пробный пуск, замерим амплитуду S2 колебаний, вынужденных моментом дисбалансов
|
при этом S2 = moD2.
Таким образом, выполнив активный пуск и два пробных, получим величину амплитуд SA, S1, S2. На рис. 47, в изображены векторные диаграммы. Используя свойство диагоналей параллелограмма, получим модуль дисбаланса ![]()
|
 . (84)
. (84)Помножим обе части этого уравнения на m0 и на основание пропорциональности амплитуд и дисбалансов, а также уравнение (81).
Найдем:
|
 . (85)
. (85)Теперь из уравнения (80) определим модуль DA искомого баланса:
DA = S1/m0.
Для балансировки ротора в плоскости А в этой плоскости следует расположить корректирующую массу mKA, дисбаланс которой определяется из уравнения  . Величину самой массы mKA получим, задавшись эксцентриситетом eKA: mKA = DKA/eKA.
. Величину самой массы mKA получим, задавшись эксцентриситетом eKA: mKA = DKA/eKA.
Угловую координату jKA найдем через ее косинус:
|
 или
или  , (86)
, (86)где Sn=Dnm0. Полученному значению косинуса соответствуют два угла, одинаковых по абсолютной величине, но противоположных по знаку. Поэтому верное направление отсчета угла jKA от линии СN наперед неизвестно, и его следует определить способом проб.
Получив из опыта амплитуды SA, S1, S2, можно найти искомый дисбаланс DA и угловую координату jKA также и графическим путем.
Чтобы определить вектор дисбаланса ![]() , ротор 1 нужно снять с подшипников рамы 2, повернуть вокруг вертикальной оси и вновь положить на подшипники, но так, чтобы с осью шарнира О на этот раз была бы совмещена плоскость коррекции А. Тогда влияние момента дисбаланса на вынужденные колебания системы ротор –– рама будет исключено, и они будут происходить только под воздействием момента МDB = DBlcos(Wбt).
, ротор 1 нужно снять с подшипников рамы 2, повернуть вокруг вертикальной оси и вновь положить на подшипники, но так, чтобы с осью шарнира О на этот раз была бы совмещена плоскость коррекции А. Тогда влияние момента дисбаланса на вынужденные колебания системы ротор –– рама будет исключено, и они будут происходить только под воздействием момента МDB = DBlcos(Wбt).
После такой перекладки ротора надо методом двух пробных пусков определить дисбаланс ![]() , а затем отбалансировать ротор в плоскости коррекции В.
, а затем отбалансировать ротор в плоскости коррекции В.
Пример станка третьей группы, когда ось вращения ротора совершает во время балансировки пространственное движение, показан на рис. 48. Неуравновешенный ротор 1 вращается с постоянной угловой скоростью ωб в подшипниках, смонтированных на плите 2. Она опирается на станину посредством четырех пружин 3. С плитой 2 связаны два сейсмических датчика 4 и 5.
Рис. 48. Динамический балансировочный станок 3-й группы
При вращении ротора под влиянием его неуравновешенности ось Z и плита 2 совершают пространственное движение, которое воспринимается датчиками 4 и 5. Датчики преобразуют вынужденные механические колебания плиты ЭДС, направляемые в электронное счетно-решающее устройство, которое является составной частью балансировочного станка. Электросхема этого устройства смонтирована таким образом, что измеритель дисбаланса ![]() настраивается на исключение в своих показаниях влияния дисбаланса
настраивается на исключение в своих показаниях влияния дисбаланса ![]() и дает, таким образом, сведения только о дисбалансе
и дает, таким образом, сведения только о дисбалансе ![]() . Точно также благодаря специальной настройке измеритель дисбаланса
. Точно также благодаря специальной настройке измеритель дисбаланса ![]() дает сведения только об этом дисбалансе. Оба искомых дисбаланса одновременно определяются электронным устройством, чем обеспечивается высокая производительность станка. После определения
дает сведения только об этом дисбалансе. Оба искомых дисбаланса одновременно определяются электронным устройством, чем обеспечивается высокая производительность станка. После определения ![]() и
и ![]() оператор балансирует ротор в плоскостях коррекции, обычно способом удаления материала.
оператор балансирует ротор в плоскостях коррекции, обычно способом удаления материала.
11. ВИБРОИЗОЛЯЦИЯ И ВИБРОЗАЩИТА
Создание высокопроизводительных машин и скоростных транспортных средств, форсированных по мощностям, нагрузкам и другим рабочим характеристикам, неизбежно приводит к увеличению интенсивности и расширению спектра вибрационных и виброакустических полей. Этому способствует также широкое использование в промышленности и строительстве новых высоко эффективных машин, работающих на основе вибрационных и виброударных процессов. Вредная вибрация нарушает планируемые конструктором законы движения машин, механизмов и систем управления, порождает неустойчивость рабочих процессов и может вызвать отказы и полную расстройку всей системы. Из-за вибрации увеличиваются динамические нагрузки в элементах конструкций (кинематических парах механизмов, стыках и др.), в результате снижается несущая способность деталей, развиваются трещины, возникают усталостные разрушения. Действие вибрации может изменить внутреннюю и поверхностную структуру материалов, условия трения и износа на контактных поверхностях деталей машин и привести к нагреву конструкций.
Вибрация порождает шум, являющийся важным экологическим показателем среды обитания человека. Вибрация оказывает и непосредственное воздействие на человека, снижая его функциональные возможности и работоспособность. Поэтому особое значение приобретают методы и средства оценки виброактивности и уменьшения уровня вибрации. Совокупность таких методов и средств принято называть виброзащитой.
Принцип виброизоляции.
Элементы расчётной модели и их характеристика
В расчётной модели виброзащитной системы можно выделить три основные части: источник возмущения (И), объект защиты (О) и виброизолирующее устройство (ВУ). В простейшем случае источник и объект считаются твёрдыми телами, движущимися поступательно вдоль некоторой оси Х. На рис. 49 дана принципиальная схема виброзащитной системы: а) общий случай; б) силовое возбуждение F = F(t); в) кинематическое возбуждение ξ = ξ(t). Приложенные к системе внешние силы F (возбуждения), а также внутренние силы R и R¢, с которыми виброизолирующее устройство воздействует на них, считаются направленными вдоль оси X; тем самым ось X служит осью рассматриваемого виброизолирующего устройства.
| а) |
б) | |
в) |
Рис. 49. Принципиальная схема
виброзащитной системы
В большинстве случаев масса одного из тел системы –– источника или объекта –– существенно превышает массу другого тела –– соответственно объекта или источника. Тогда движение тела “большой” массы может считаться независящим от движения тела “малой” массы. Если, в частности, “большую” массу имеет объект, то его обычно считают неподвижным; движение системы вызывается в этом случае приложенными к источнику внешними силами, представляющими силовое возбуждение F = F(t) (рис. 49, б). Если “большую” массу имеет источник, то закон его движения x = x(t) можно считать заданным; это движение играет роль кинематического возбуждения объекта (рис. 49, в). В обоих случаях тело “большей” массы называют несущим или основным, тело “малой” массы –– несомым.
Схему, представленную на рис. 49, б, обычно используют тогда, когда речь идёт о защите зданий, сооружений, перекрытий или фундаментов от динамических воздействий, возбуждаемых установленными на них машинами и механизмами с неуравновешенными движущимися частями или иным виброактивным оборудованием. Схему, изображённую на рис. 49, в, используют в задачах виброзащиты приборов, аппаратов, точных механизмов или станков, т. е. оборудования, чувствительного к вибрациям и устанавливаемого на колеблющихся основаниях или движущихся объектах.
Виброизолирующее устройство представляет важнейшую часть виброзащитной системы; его назначение состоит в создании такого режима движения, инициируемого заданными возмущениями, при котором реализуется цель защиты объекта. Во многих случаях это оказывается достижимым при использовании безынерционного виброизолирующего устройства, которое для схем, изображённых на рис. 49, представляет одноосный виброизолятор. Для такого виброизолятора реакции R и R¢ совпадают по величине (R = R¢) причём в рассматриваемом случае реакцию R можно считать пропорциональной деформации d и скорости деформации ![]() виброизолятора:
виброизолятора:
R = cd + b![]() . (87)
. (87)
Зависимость (87) описывает линейную характеристику простого безынерционного виброизолятора; коэффициенты c и b называют соответственно и коэффициентом демпфирования. При b = 0 (87) описывает характеристики линейного идеального упругого элемента (пружины); при c = 0 (87) описывает характеристику линейного вязкого демпфера. Таким образом, модель виброизолятора с характеристикой (1) определяет собственную частоту системы:
![]() =
=![]() . (88)
. (88)
Значение c определяет также статическую деформацию ![]() (осадку) виброизолятора, связанную с
(осадку) виброизолятора, связанную с ![]() формулой
формулой ![]()
![]() =
=![]() ,
,
где ![]() –– деформация под осевой статической нагрузкой mgsina; m –– масса невесомого тела; a –– угол наклона оси виброизолятора к горизонту. Зависимость
–– деформация под осевой статической нагрузкой mgsina; m –– масса невесомого тела; a –– угол наклона оси виброизолятора к горизонту. Зависимость ![]() =
=![]()
![]() приведена на рис. 50.
приведена на рис. 50.
| Рис. 50. Зависимость собственной частоты системы от деформации |
Расчётная модель простейшей виброзащитной системы с одной степенью свободы дана на рис. 51; здесь m, x –– соответственно масса и координата несомого тела; F –– сила, приложенная к несомому телу; x –– координата основания; c, b –– соответственно жёсткость и коэффициент демпфирования виброизолятора. Демпфирующие свойства такой системы характеризуются коэффициентом демпфирования
 (89)
(89)
и относительным демпфированием
 . (90)
. (90)
При ![]() в системе реализуется критическое демпфирование.
в системе реализуется критическое демпфирование.
| Рис. 51. Модель виброзащитной системы с одной степенью свободы |
Эффективность виброзащиты
Под эффективностью виброзащиты понимается степень реализации виброзащитным устройством целей виброзащиты. При силовом гармоническом возбуждении:
F(t)=![]() ;
;  ,
,
где ![]() и
и ![]() –– соответственно амплитуда и частота вынуждающей силы; цель защиты может состоять в уменьшении амплитуды
–– соответственно амплитуда и частота вынуждающей силы; цель защиты может состоять в уменьшении амплитуды ![]() силы, передаваемой на неподвижный объект,
силы, передаваемой на неподвижный объект,
![]()
![]()
 , (91)
, (91)
или в уменьшении амплитуды ![]() установившихся вынужденных колебаний источника
установившихся вынужденных колебаний источника
 . (92)
. (92)
При кинематическом гармоническом возбуждении
F(t) = 0; ![]() (t) =
(t) = ![]() . (93)
. (93)
Цель защиты может заключаться в уменьшении амплитуды абсолютного ускорения (перегрузки) объекта
W =  , (94)
, (94)
а также в уменьшении амплитуды его колебаний относительно основания.
Качественно степень реализации цели виброзащиты можно охарактеризовать значениями безразмерных коэффициентов эффективности. Например:
 –– коэффициент виброизоляции, (95)
–– коэффициент виброизоляции, (95)
 –– коэффициент динамичности. (96)
–– коэффициент динамичности. (96)
Динамическое гашение виброколебаний
Метод динамического гашения колебаний состоит в присоединении к объекту виброзащиты дополнительных устройств с целью изменения его вибрационного состояния. Работа динамических гасителей основана на формировании силовых воздействий, передаваемых на объект. Этим динамическое гашение отличается от другого способа уменьшения вибрации, характеризуемого наложением на объект дополнительных кинематических связей, например закрепление отдельных его точек.
Изменение вибрационного состояния объекта при присоединении динамического гасителя может осуществляться как путём перераспределения колебательной энергии от объекта к гасителю, так и в направлении увеличения рассеяния энергии колебаний. Первое реализуется изменением настройки системы «объект –– гаситель» по отношению к частотам действующих вибрационных возмущений путем коррекции упруго инерционных свойств системы. В этом случае присоединяемые к объекту устройства называют инерционными динамическими гасителями. Инерционные гасители применяют для подавления моногармонических или узкополосных случайных колебаний.
При воздействии вибрационных нагрузок более широкого частотного диапазона предпочтительней оказывается второй способ, основанный на повышении диссипативных (рассеивающих) свойств системы путем присоединения к объекту дополнительных специальных демпфирующих (заглушающих) элементов. Динамические гасители диссипативного типа получили название поглотителей колебаний. Если они одновременно корректируют упруго инерционные и диссипативные свойства системы, то их называют динамическими гасителями с трением.
Динамические гасители могут быть конструктивно реализованы на основе пассивных элементов (масс, пружин, демпферов) и активных, имеющих собственные источники энергии (т. е. применение систем автоматического регулирования, использующих электрические, гидравлические и пневматические управляемые элементы).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
