

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
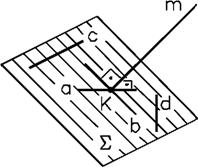
РЕШЕНИЕ ЗАДАЧИ
п |
2 |
АЛГОРИТМ
а). S 3 g ^ 2
б). гпе = (1- 2)
с). К =п g
ОПРЕДЕЛЕНИЕ ВИДИМОСТИ ПРЯМОЙ
а), на Щ — по конкурирующим точкам 4 и 5
б), на Ilg —по конкурирующим точкам 1 и 3
: 8 : 20
----- ЛЕКЦИЯ 3 ---
ВТОРАЯ ПОЗИЦИОННАЯ ЗАДАЧА
способ вспомогательных поверхностей (С. В.П.). |
Две поверхности пересекаются по линии (совокупности линий), точки которой принадлежат одновременно каждой из заданных поверхностей.
I ОСНОВА I-
СУЩНОСТЬ
СВ. П.
каждая из искомых точек - есть результат пересечения |-|двух линий, образующихся при пересечении вспомогательной поверхности с каждой из заданных.
 |
I ОБЩАЯ СХЕМА РЕШЕНИЯ
1. Проводится вспомогательная по-
верхность 2. пересекающая за-
данные поверхности Ф и ^.
____________ 2пФл £п>1<______________
2. Определяются линии тип пересечения вспомогательной поверхности 2 с каждой из заданных т = 2пфдп=1:п1|>_______________
3. Отмечаются точки А и В пересечения линий тип. являющиеся искомыми А=тпплВ=тпп
------- □ —
__________________________ ЛЕКЦИЯ 3 ________________________________
РЕШЕНИЕ ВТОРОЙ ПОЗИЦИОННОЙ ЗАДАЧИ ПО ЕЕ АЛГОРИТМУ
ЗАДАЧА |
|
Построить линию пересечения MN двух ппоскостей общего положения 2(апЬ> и A(clld>.
Г2=т2=П2 12=ПП 2 = П2 |
М2 Ч 3-
[алгоритм!
для. М^0ГпЕдГпЛ:Г||П1;(2)пп = ГпА, п = ГпЕ:(з)М = тпп для. фг'пЕдГ'пЛ ;Г'|1П1:(2)|п'= Г'пД. п'= г'пЕ: (з)N = т'пп'
=ЛЕКЦИЯ 3
РЕШЕНИЕ ВТОРОЙ позиционной ЗАДАЧИ ПО АЛГОРИТМУ ПЕРВОЙ ПОЗИЦИОННОЙ
Построение линии пересечения плоскостей, заданных многоугольниками, можно
упростить, если вспомогательные проецирующие плоскости проводить не про-
извольно, а через какие-либо две из сторон многоугольников._________________
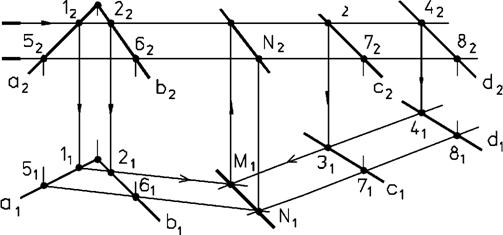
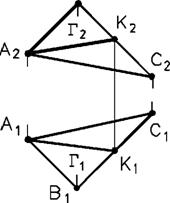
Построить линию пересечения М N двух плоскостей общего положения Д{АВС)и S (DEFK), заданных многоугольниками.
АНАЛИЗ
Т| проекция А2В2 стороны А В многоугольника ABC, через которую проведена вспомогательная проецирующая плоскость Г{Г±П2). уже является фронт, проекцией линии пересечения пл, Г и многоугольника ABC
2] в дальнейшем требуется лищь найти вторую проекцию линии пересечения плоскости Г с многоугольником DEFK
^ точка М пересечения двух вышеупомянутых линий является искомой
4] аналогично определяется вторая точ-
I.
ка N пин. пересеч. MN (по пл. ГэДС)
112:
22
~ ЛЕКЦИЯ 3
РЕШЕНИЕ ВТОРОЙ позиционной ЗАДАЧИ ПО АЛГОРИТМУ ПЕРВОЙ ПОЗИЦИОННОЙ
РЕШЕНИЕ ЗАДАЧИ
АЛГОРИТМ
ГЛ п1 |
Т] Г э АВ: Г_1П2 21ГпЕ = {1-2) ^ = {1-2)п АВ
Г'э АС; r'_Lm
ГЕ1 Til
r'nS = (3-4) N = (3-4)пАС
Л MN-искомая пиния
ОПРЕДЕЛЕНИЕ ВИДИМОСТИ
а) на Ilg - по фронтально конку-
рирующим точкам 2 и 7
б) на - по горизонтально кон-
курирующим точкам 5 и 6
®
©
© ©
: ЛЕКЦИЯ 3
КОНТРОЛЬНЫЕ ВОПРОСЫ к ЛЕКЦИИ 3
Какие задачи называются позиционными?
Что лежит в основе решения первой и второй позиционной
задачи?
В чем различие общих схем решения первой и второй позиционной задачи?
Отчего зависит вид и положение вводимых вспомогательных поверхностей?
В каких случаях решение задач упрощается?
Как определяется видимость прямой при ее пересечении с
плоскостью?
В каких случаях вторую позиционную задачу целесообразно решать по алгоритму первой позиционной? Как определить видимость в случае взаимного пересечения двух плоскостей общего положениа заданных многоугольниками?
23
ЛЕКЦИЯ 4
ОТНОСИТЕЛЬНОЕ ПОЛОЖЕНИЕ ПРЯМОЙ И ПЛОСКОСТИ. ДВУХ ПЛОСКОСТЕЙ Взаимная параллельность прямой и плоскости
ТЕОРЕМА СТЕРЕОМЕТРИИ |
Если прямая параллельна какой-либо прямой, принадлежащей ллоскости, то данные прямая и плоскость параллельны.
|
ЗАДАЧА I Через точку М провести прямую d, параллельную плоскости Г (ABC) В2
|
РЕШЕНИЕ ЗАДАЧИ
© АКСГ(АВС) @ Me dllAK ф dllAK=>dlir
ЗАДАЧА ИМЕЕТ МНОЖЕСТВО РЕШЕНИЙ
ЛЕКЦИЯ 4
ВЗАИМНАЯ ПАРАЛЛЕЛЬНОСТЬ ДВУХ ПЛОСКОСТЕЙ
ТЕОРЕМА СТЕРЕОМЕТРИИ
Если две пересекающиеся прямые одной плоскости соответственно параллельны двум прямым другой плоскости - то эти плоскости - параллельны.
|

 [ЗАДАЧА I Через точку М провести плоскость!], параллельную плоскости Г (ABC) В2
[ЗАДАЧА I Через точку М провести плоскость!], параллельную плоскости Г (ABC) В2
РЕШЕНИЕ ЗАДАЧИ
0 Mean АВ дМеЫ! ВС
|

ф М ЈE{anb)
ф QllAB дЬпВС =>Е 11Г
ЗАДАЧА ИМЕЕТ МНОЖЕСТВО РЕШЕНИЙ
ЛЕКЦИЯ 4 ZZ
"ема: ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫЕ ПРЯМЫЕ И ПЛОСКОСТИ
Признаки взаимной перпендикулярности (стереометрия).
Две прямые называются взаимно перпендикулярными, если угол между ними равен 90°
Если прямая перпендикулярна каждой из двух пересекающихся прямых, принадлежащих плоскости, то эта прямая и плоскость взаимно перпендикулярны.
 |
 |
®
/_а=ЯО°=> а _L b
m Д_адпп J_b;S{an b)=> m_L Е
ЛЕКЦИЯ 4
ПРИЗНАКИ ВЗАИМНОЙ ПЕРПЕНДИКУЛЯРНОСТИ (СТЕРЕОМЕТРИЯ)
Прямая, перпендикулярная плос - Если плоскость проходит через
кости, перпендикулярна к любой перпендикуляр к другой плоско-
прямой, принадлежащей этой сти, то она перпендикулярна этой
плоскости. плоскости.
|
(D
пп
±Е=>т_1ссЕдПп_1с1сЕ
На основании признаков перпендикулярности в пространстве в Н. Г. разработаны признаки для комплексного чертежа - ТЕОРЕМЫ 1 и 2.
4 -
ЛЕКЦИЯ 4 ПРОЕКЦИИ ПРЯМОГО УГЛА
Любой линейный угол проецируется на плоскость проекций в истинную величину, если его стороны параллельны этой плоскости.
 Если одна сторона прямого угла параллельна плоскости проекций, а другая является прямой общего положения, то прямой угол проецируется на эту плоскость проекций без искажения, то есть в прямой же угол.
Если одна сторона прямого угла параллельна плоскости проекций, а другая является прямой общего положения, то прямой угол проецируется на эту плоскость проекций без искажения, то есть в прямой же угол.
пусть Z ABC = 90', АВ ii П1, ВС и Щ I тогда
© Z ABC -> ZAiBiCi = 90' Ф АВл AiBiC L ±П1 (3) ВС± АВ^ВС ± BBi=>BC±S [следовательтю
0 ВС ± BDc ЕлВС ±MNcE.„ I очевидно"
D Z CBD = ZCiBiDi = Z AiBiCi = 9D*
: ЛЕКЦИЯ 4 :
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ ТЕОРЕМЫ
 |  |
h 11П1 => zDiBiCi = 90"
hlini л h - Ld
_____________ ЛЕКЦИЯ 4 __________________
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ ТЕОРЕМЫ 1
проекция прямого угла, проекции взаимно перпендикулярных
(З) одна сторона которого (4) скрещивающихся прямых, одна из
является фронталью которых является фронталью
| \ | ||
 с,
с,11^=2, 3.
f II П2 => ZD2B2C2=90'
f lin2Af-Lcl
ЛЕКЦИЯ 4
ПРЯМАЯ. ПЕРПЕНДИКУЛЯРНАЯ К ПЛОСКОСТИ
Если прямая перпендикулярна к плоскости в пространстве, то на комплексном чертеже горизонтальная проекция прямой перпендикулярна горизонтальной проекции горизонтали, а фронтальная проекция-перпендикулярна к фронтальной проекции фронтали этой плоскости.
X
12
[пусть прямая AK-Ll| Ф К е Khnf 1 Ф AK_Ll(hnf >=>
=>AiKi_Lhi е I ^A2K2-Lf2e I Ф и тогда по теореме N1 (рис. 5)
h=hi
zAKh = zAiKihi = 90
П.
Z AKf = zA2K2f2 = 90"
для построения проекций перпендикуляра к плоскости можно использовать любые горизонтали и фронтали, принадлежащие данной плоскости.
8 ^^^^^^^^^^^^^^^
^^^=^^^= ЛЕКЦИЯ А
ИСПОЛЬЗОВАНИЕ ТЕОРЕМ 1 И 2 ДЛЯ РЕШЕНИЯ ЗАДАЧ
Провести перпендикуляр из точки А к плоскости Е(апЬ)
РЕШЕНИЕ ЗАДАЧИ
Aie di _Lhi; Аг^ d2-lf2 Aed±E(hnf)=>d±E(hnf)
Точка пересечения прямой d с плоскостью S в задаче не определялась,
: ЛЕКЦИЯ 4
 ИСПОЛЬЗОВАНИЕ ТЕОРЕМ 1 И 2 ДЛЯ РЕШЕНИЯ ЗАДАЧ
ИСПОЛЬЗОВАНИЕ ТЕОРЕМ 1 И 2 ДЛЯ РЕШЕНИЯ ЗАДАЧ
Восставить перпендикуляр к плоскости Е{алЬ) в точке А, принадлежащей плоскости,
В2. d.
A^ed^±b^: a2ed2-lf2 3) AЂd±hJcE/^Ae2=>d±E |
РЕШЕНИЕ ЗАДАЧИ
ЛЕКЦИЯ L
ИСПОЛЬЗОВАНИЕ ТЕОРЕМ 1 И 2 ДЛЯ РЕШЕНИЯ ЗАДАЧ
Через точку А провести плоскость 2, перпендикулярную прямой d общего положения.
РЕШЕНИЕ ЗАДАЧИ |
Через точку А достаточно провести две прямые, каждая из которых была бы перпендикулярна заданной прямой d
® Aeh_Ld;(hi_Ldi)
(2) Aef±d ; (f2-Ld2} (3)AЂE(hnf)=>E±d
Точка пересечения прямой d с плоскостью 2 в задаче не определялась.
ЛЕКЦИЯ 4
ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫЕ ПЛОСКОСТИ
Две плоскости взаимно перпендикулярны, если одна из них проходит через перпендикуляр к другой (или параллельна этому перпендикуляру
Через точку А провести плоскость Е, перпендикулярную плоскости Д(апЬ),
1 - ЫЙ СПОСОБ ПОСТРОЕНИЯ
Плоскость Е проходит через лрямую. перпендикулярную плоскости Д
® hcA/^fcA
(J) Аепп± A(anb)=>mi±h^;nn2±f2
Q) AeE(nnm)
(4) m_LA/\mcE=>S_LA
П- произвольная прямая Задача имеет множество решений
ЗАДАЧА
ЛЕКЦИЯ 4
ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫЕ ПЛОСКОСТИ
Через точку А провести плоскость Е, перпендикулярную плоскости А(спс1).
2 - ОИ СПОСОБ ПОСТРОЕНИЕ
Плоскость S перпендикулярна одной из прямых, принадлежащих плоскости Д
® AEh:(h,_Ldi) © Aef :(f2-Ld2)
(3)AeE(hnf)_LdcA(cnd}=>E_L А Задача имеет множество решений
1з:
^ЛЕКЦИЯ 4
ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫЕ ПРЯМЫЕ ОБЩЕГО ПОЛОЖЕНИЯ
Если стороны прямого угла являются прямыми обшего положения, то прямой угол на каждую из трех плоскостей проекций (П,...Пз) проецируется с искажением (частные случаи рассмотрены ранее).
При построении проекиий такого угла необходимо исходить из
следующих положений:
(Т) если две прямые взаимно перпендикулярны, то через каждую из них можно провести плоскость, перпендикулярную к другой прямой:
если прямая перпендикулярна к плоскости, то она перпендикулярна любой прямой, принадлежащей этой плоскости.
[в~ы в о д|
Построение взаимно перпендикулярных прямых общего попожения
сводится к построению плоскости, перпендикулярной к заданной прямой общего положения.
^^^^^^^^^^^^^ 14
30
= ЛЕКЦИЯ 4
ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫЕ ПРЯМЫЕ ОБЩЕГО ПОЛОЖЕНИЯ
задача |
Построить произвольную прямую d, перпендикулярную заданной прямой п общего положения,
решение задачи!
® А - произвольная точка в пространстве;
(2) AeS(hnf)l n=>hilni;f2ln2
(3) d (СВ) с Е - произвольная прямая
в плоскости Е;
®dcEln=>dln Задача имеет множество решений
® ®
®
(D
(Z)
=15
ЛЕКЦИЯ 4 КОНТРОЛЬНЫЕ ВОПРОСЫ К ЛЕКЦИИ 4
Какими условиями определяется взаимная параллельность прямой линии и плоскости?
Как провести плоскость через прямую параллельно данной прямой?
Каким условием определяется взаимная перпендикулярность прямой линии и плоскости?
Каким условием определяется взаимная перпендикулярность двух плоскостей?
Каким условием определяется взаимная перпендикулярность двух прямых линий общего положения?
Как через данную точку провести плоскость, перпендикулярную к данной прямой?
Как через заданную прямую провести плоскость, перпендикулярную к заданной плоскости?
----- 16
31
[ОПРЕДЕЛЕНИЕ!
:лЕкиия 5
КОМПЛЕКСНЫЕ ЗАДАЧИ
КОМПЛЕКСНЫМИ НАЗЫВАЮТСЯ ЗАДАЧИ, В КОТОРЫХ НА ИСКОМЫЙ ЭЛЕМЕНТ НАЛОЖЕНЫ ДВА УСЛОВИЯ И БОЛЕЕ.
ОБЩАЯ СХЕМА РЕШЕНИЯ
© ВВОДЯТСЯ ВСПОМОГАТЕЛЬНЫЕ ГЕОМЕТРИЧЕСКИЕ ФИГУРЫ (МНОЖЕСТВА), КАЖДАЯ ИЗ КОТОРЫХ В ОТДЕЛЬНОСТИ УДОВЛЕТВОРЯЕТ ОДНОМУ ИЗ ОДНОЗНАЧНЫХ УСЛОВИЙ. НАЛОЖЕННЫХ НА ИСКОМЫЙ ЭЛЕМЕНТ.
ОДНОЗНАЧНЫМ НАЗЫВАЕТСЯ УСЛОВИЕ, КОТОРОМУ УДОВЛЕТВОРЯЕТ ТОЛЬКО ОДНА ГРАФИЧЕСКИ ПРОСТАЯ ГЕОМЕТРИЧЕСКАЯ ФИГУРА ( ПРЯМАЯ, ОКРУЖНОСТЬ, ПЛОСКОСТЬ, ЦИЛИНДР, КОНУС. СФЕРА ), ОБРАЗОВАННАЯ МНОЖЕСТВОМ ИСКОМЫХ ЭЛЕМЕНТОВ.
@ ОПРЕДЕЛЯЕТСЯ ИСКОМЫЙ ЭЛЕМЕНТ КАК РЕЗУЛЬТАТ ПЕРЕСЕЧЕНИЯ ВВЕДЕННЫХ В ЗАДАЧУ ВСПОМОГАТЕЛЬНЫХ МНОЖЕСТВ.
ЛЕКЦИЯ 5
СТАДИИ РЕШЕНИЯ КОМПЛЕКСНЫХ ЗАДАЧ
При решении конкретной комплексной задачи необходимо расшифровать первый пункт общей схемы решения - точно указать сколько и какие именно множества (по виду и положению) должны быть введены для определения искомого элемента. Это выявляется после анализа условий задачи.
Ф |
АНАЛИЗ УСЛОВИЙ ЗАДАЧИ
АЛГОРИТМ РЕШЕНИЯ ЗАДАЧИ
® |
(3)1 ИССЛЕДОВАНИЕ
ПОСТРОЕНИЕ К. Ч.
а) ИЗУЧАЮТСЯ ЗАДАННЫЕ ГЕОМЕТРИЧЕСКИЕ ФИГУРЫ И ИХ
ПРОСТРАНСТВЕННОЕ РАСПОЛОЖЕНИЕ;
б) УСТАНАВЛИВАЕТСЯ ВЗАИМОСВЯЗЬ ИСКОМОГО ЭЛЕМЕНТА
с КАЖДОЙ ИЗ ЗАДАННЫХ ГЕОМЕТРИЧЕСКИХ ФИГУР В ВИДЕ ОДНОЗНАЧНЫХ УСЛОВИЙ. КОТОРЫМ СООТВЕТСТВУЮТ ГРАФИЧЕСКИ ПРОСТЫЕ ВСОМОГАТЕЛЬНЫЕ МНОЖЕСТВА. КОЛИЧЕСТВО МНОЖЕСТВ РАВНО КОЛИЧЕСТВУ УСЛОВИЙ.
СОДЕРЖАНИЕ И ПОСЛЕДОВАТЕЛЬНОСТЬ ПРОСТРАНСТВЕННЫХ ОПЕРАЦИЙ, НЕОБХОДИМЫХ ДЛЯ ОПРЕДЕЛЕНИЯ ИСКОМОГО ЭЛЕМЕНТА. ВЫЯВЛЯЕТСЯ НА ОСНОВЕ ПРОВЕДЕННОГО АНАЛИЗА.
ПРОВОДИТСЯ С ЦЕЛЬЮ ВЫЯВЛЕНИЯ УСЛОВИЙ СУЩЕСТВОВА-
НИЯ РЕШЕНИЯ И КОЛИЧЕСТВА ВОЗМОЖНЫХ РЕШЕНИЙ.___
ВЫПОЛНЯЕТСЯ В УСТАНОВЛЕННОЙ АЛГОРИТМОМ ПОСЛЕДОВАТЕЛЬНОСТИ ПРИ НАИМЕНЬШЕМ КОЛИЧЕСТВЕ ПОСТРОЕНИЙ.
ЛЕКЦИЯ 5
ПРИМЕР РЕШЕНИЯ КОМПЛЕКСНОЙ ЗАДАЧИ
Из точки А опустить перпендикуплр на прямую d общего положения.
АНАЛИс
Z ЛЕКЦИЯ 5
ПРИМЕР РЕШЕНИЯ КОМПЛЕКСНОЙ ЗАДАЧИ (продолжение!
![]()
АЛГОРИТМ
Ф Аеп ±d=l>A(hnf}_Ld @ Aen п d=>r(A. d) 3) П = Д П Г
[исследование
задача имеет единственное рещение, т. к. две плоскости пересекаются по прямой линии
I построение"
по схеме 1-ой позиционной задачи
Ф Ai ЈAi{hi и fi);A2e A2(h2 и f2) AGr{A, d)
П = A П Г — искомая прямая
ЛЕКЦИЯ 5
СПОСОБЫ ПРЕОБРАЗОВАНИЯ КОМПЛЕКСНОГО ЧЕРТЕЖА
Вопрос: Можно ли по чертежу сразу определить расстояние между двумя параллельными прямыми а и Ь?
ai
ДА
прямые частного попожения
РЕШЕНИЕ ЗАДАЧ Н. Г. УПРОЩАЕТс"й]
ЧАСТНОЕ ПОЛОЖЕНИЕ
ГЕОМЕТРИЧЕСКИЙ ОБРАЗ
ПЕРЕВОДИТСЯ ^> [ГЕОМЕТРИЧЕСКИЙ ОБРАЗ
изменением положения плоскостей проекций при неизменном положении Г. О.
ОСУЩЕСТВЛЯЕТСЯ
изменением положения Г. О. относительно плоскостей проекций
изменением направления проецирования относительно плоскостей проекций
 |
С. 3. пп. ПР.
СУТЬ
ВВЕДЕНИЕ НОВОЙ ПЛОСКОСТИ ПРОЕКЦИЙ
ЧАСТНОЕ ПОЛОЖЕНИЕ к—ЗАНИМАЕТ —'
II ИЛИ _L ГЕОМЕТРИЧЕСКОМУ ОБРАЗУ
НЕЗАМЕНЯЕМОЙ (ОСТАЮЩЕЙСЯ) ПЛОСКОСТИ ПРОЕКЦИЙ
Преобразование системы плоскостей
Соотношения в системах плоскостей
П
![]()
П1 П1 |
=>п-=>
1 ^^5
Условные названия новых плоскостей проекций П4 = П2 - Фронтальная плоскость проекций П^^П^ - горизонтальная плоскость проекций
' 6 -
34
ЛЕКЦИЯ 5
ЗАМЕНА ФРОНТАЛЬНОЙ ПЛОСКОСТИ ПРОЕКЦИЙ (преобразование системы ^ в систему Д^)
П
в ПРОСТРАНСТВЕ
ч | \2 | |
л | ||
Х1Д
П2^П4; ПдХП^; П^пПд => Xi^; АА4_1П^:
А ку овщАЯ => Z д = const фОТКЛАДЫВАЕМ А iz, A4=Ai2A2=AiA=Za
7
ЛЕКЦИЯ 5
ЗАМЕНА ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРОЕКЦИЙ
п |
По
(преобразование системы —- в систем\
П
п
|
 12'
12'X
Ф ПРОВОДИМ ОСЬ Xi2 J-Ai А2 ; ФПРОВОДИМ ось Х25 ;
@из точки А2 ПРОВОДИМ линию связи
25' |
П2пП5=>Х25:АА5_ьП5; _L оси X
А А2- ОБЩАЯ => Уд = const ©ОТКЛАДЫВАЕМ А25А5= А-|2Ai=A2А=Уд
^^^^^^^^^^^^= ЛЕКЦИЯ 5
АЛГОРИТМ СПОСОБА ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
ф На заданном чертеже проводим ось проекций Х12
ф Проводим новую ось проекций в положении обусловленном задачей.
Ф От незаменяемой проекции точки проводим линию связи ± новой оси проекций.
Ф Замеряем расстояние от заменяемой проекции точки до оси проекций заменяемого поля и откладываем его на новом поле проекций вдоль новой линии связи от оси проекций нового поля.
5
п.
Ik п5
ЛЕКЦИЯ 5 ^^^^^^^^^^^^^^ ОСНОВНЫЕ ЗАДАЧИ, РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
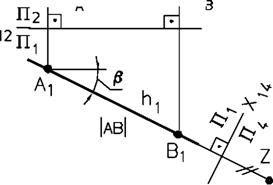
ЗАДАЧА 1 Преобразовать прямую общего положения во фронталь.
 |
I РЕШЕНИЕ ЗАДАЧИ
Ф ПРОВОДИМ ось Xi2 - L А1А2;
@ ПРОВОДИМ ось Xi4 II Qi;
Ф ИЗ ТОЧЕК и В-| ПРОВОДИМ ЛИНИИ СВЯЗИ _L ОСИ х14;
Ф НА линиях связи от оси х14. ОТКЛАДЫВАЕМ ОТРЕЗКИ z д и z g
a{Q^) — ФРОНТАЛЬ
а — УГОЛ НАКЛОНА а к П.
ЛЕКЦИЯ 5
ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
ЗАДАЧА 2 Преобразовать прямую уровня во фронтально проецирующую.
В
РЕШЕНИЕ ЗАДАЧИ
 X
X
© ПРОВОДИМ ОСЬ Xi2 - L А1А2;
(2) ПРОВОДИМ ось Хи _Lhi ;
(3) ЧЕРЕЗ точки А^ и ПРОВОДИМ
линию СВЯЗИ _L оси Хк;
® НА линии связи от оси Xl4 ОТКЛАДЫВАЕМ ОТРЕЗОК Z =Za = Zg
'^4^^4~^4^ ФРОНТАЛЬНО
h ( h / ) — ПРОЕЦИРУЮЩАЯ ПРЯМАЯ
^ ЛЕКЦИЯ 5
ОСНОВНЫЕ ЗАДАЧИ, РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
ЗАДАЧА з] Преобразовать прямую общего положения в проецирующую.
 Одно преобразование решения задачи не дает т. к. новая плоскость, перпендикулярная прямой, не будет перпендикулярна ни одной из старых плоскостей проекций и, как следствие, не образует ни с одной из них прямоугольн. системы плоек, проекций.
Одно преобразование решения задачи не дает т. к. новая плоскость, перпендикулярная прямой, не будет перпендикулярна ни одной из старых плоскостей проекций и, как следствие, не образует ни с одной из них прямоугольн. системы плоек, проекций.
ПОРЯДОК ПРЕОБРАЗОВАНИЯ
ПРЯМАЯ ОБЩЕГО ПОЛОЖЕНИЯ
_______ ±________
______ ЛИНИЯ УРОВНЯ_______
0 (D |
_______ ^________
ПРОЕЦИРУЮЩАЯ ПРЯМАЯ
: 12: 37 |
аналогично задаче 1 П2^П4; П4 II а ШдД-П-! аналогично задаче 2
______________________________ ЛЕКЦИЯ 5 ____________________________________
ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
 [задача Преобразовать плоскость общего положения Е(АВС)
[задача Преобразовать плоскость общего положения Е(АВС)
" Две ллоскости взаимно перпендикулярны, если
А П2 |
одна из них проходит через перпендикуляр к другой плоскости.
решение задачи
П2^11д;П4ХИ;ПдД_п.,
12 |
|
ф ПРОВОДИМ h с 2, т. к. для ПРЯМОЙ ЧАСТНОГО ПОЛОЖЕН. ТРЕБУЕТСЯ ОДНО ПРЕОБРАЗ. В ПРЯМУЮ ПРОЕЦИРУЮЩУЮ
ф ПРОВОДИМ ось Xi2 - L ^]^2
ф ПРОВОДИМ ось Xi4 _L h1 0 из ТОЧЕК Ai, Bi, Ci ПРОВОДИМ линии связи _L оси Xl4 <D НА линиях связи ОТ оси Хи
ОТКЛАДЫВАЕМ ОТРЕЗКИ Zf^.Z^Xiz-
^ л проецирующая ^v^i-^4>- плоскость
^= ЛЕКЦИЯ 5
ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
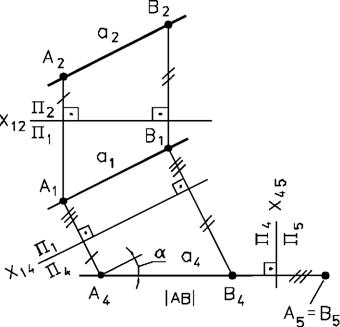
задача 5| Преобразовать проецирующую плоскость S(ABC} в плоскость уровня. А,
решение задачи]
ф проводим ось Xi2 - L А1А2; ф проводим ось х25 II ф из точек А 2,62,0 2 проводим линии связи j_ оси х25; © на линиях связи от оси х25 откладываем отрезки Уд, Ув и Yc 2(22-^5) — плоскость уровня |
П^^П^ ; п5 ii 2 ■,Щ±112
ЛЕКЦИЯ 5
ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ЗАМЕНЫ ПЛОСКОСТЕЙ ПРОЕКЦИЙ
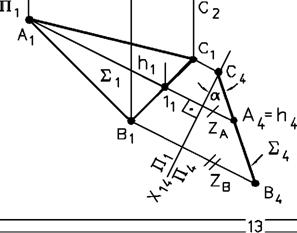
Преобразовать плоскость общего положения 2(АВС) в плоскость уровня.
РЕШЕНИЕ ЗАДАЧИ
 12
12
0| U2^n^:U^±h:n^±U^ аналогично задаче 4
аналогично задаче 5
С,
ABC
плоскость уровня
^^^^^^^^^^^^= ЛЕКЦИЯ 5
КОНТРОЛЬНЫЕ ВОПРОСЫ К ЛЕКЦИИ 5
® |
(Т) Какие задачи называются комплексными? Каковы этапы рещения комплексных задач? Зачем осуществляют преобразования комплексного чертежа? Чем отличаются способы преобразования комплексного чертежа? Как преобразовать прямую общего положения в проецирующую? Как способом замены плоскостей проекций определить углы наклона плоскости общего положения к плоскостям проекций П1,П2? Сколько раз необходимо произвести замену плоскостей проекций для преобразования плоскости общего положения в плоскость уровня?
^^^^^^^^^^^^^= 1в
39
СУЩНОСТЬ СПОСОБА ВРАЩЕНИЯ
ЛЕКЦИЯ 6 СПОСОБ ВРАЩЕНИЯ
Геометрическая фигура вращается вокруг неподвижной оси до требуемого положения, Каждая точка фигуры описывает окружность в ллоскости. перпендикулярной оси вращения.
Вращение точки А вокруг проецирующей прямой i-LlIi
 S А
S А
1 А ^ А по окружности R = О А lAi->AJno окружности R=OiAi (OiA, = OA ) 4]А2-^А2 ПО прямой С Е2 5] Z АОА' = z А^О^А j = |
Т] ±П1 дАс 211 Hi 2^
Принципы вращения точки А вокруг прямой [±П2 аналогичны
^= ЛЕКЦИЯ 6 АЛГОРИТМ СПОСОБА ВРАЩЕНИЯ
Л Через точку А проводим плоскость 2 перпендикулярно неподвижной оси вращения i.
и В плоскости 2 определяем центр О окружности, описываемой точкой А, как результат пересечения оси вращения i с плоскостью 2.
З] В плоскости 2 находим радиус R окружности, описываемой точкой А. как расстояние от точки А до оси вращения i.
л] Находим новое положение А' точки А после ее вращения на угол а. определяемый условием задачи.
Вращение прямой сводится к вращению двух точек, ей принадлежащих.
D Вращение плоскости сводится к вращению трех точек, определяющих плоскость.
Вращение прямой можно свести к вращению только одной ее точки, а вращение плоскости - к вращению двух ее точек, если провести ось вращения так, чтобы она пересекала прямую или плоскость.
ЛЕКЦИЯ 6 —
ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ВРАЩЕНИЯ.
[ЗАДАЧА 1| Преобразовать прямую общего положения d во фронталь f.
решение ЗАДАЧИ
 Преобразование осуществляется путем вращения прямой d вокруг оси i _L П ^
Преобразование осуществляется путем вращения прямой d вокруг оси i _L П ^
ia прямой d выбираем две точки А и В 2\ через точку В проводим ось i ± П-| З] точка В неподвижна, так как Be]; точка А вращается вокруг оси I в плоскости I ± ] по окружности R = Ai В,
4] Ai vJ на угол ср до положения А^:
AJBi± в1в2 ; d\ II п2 5] d '(А'В ) II п2 => d ' - фронталь f
Преобразование прямой общего положения d в горизонталь h осуществляется путем ее вращения вокруг оси ]_1п2и проходящей через какую-либо точку прямой.
3
~ ЛЕКЦИЯ 6 ОСНОВНЫЕ ЗАДАЧИ. РЕШАЕМЫЕ СПОСОБОМ ВРАЩЕНИЯ.
 IЗАДАЧА 2I Преобразовать линию уровня (например фронталь f)
IЗАДАЧА 2I Преобразовать линию уровня (например фронталь f)
'--- ' в проецирующую прямую d.
[решение задачи!
А2=12 |
Преобразование осуществляется путем вращения прямой вокруг оси 1 _L П2
[| на прямой f выбираем две точки А и В
2\ через точку А проводим ось вращения i ± п2
З] А е i => А - неподвижна; точка В вращается во-
д ^РУ ' ^ пл-ти I_Li по окружности R = a2b2
^ ^ ^0 вращаем В 2 на угол j8 до положения а2в 2 - L П.|

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
