

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При варьировании ![]() изменяются соотношения
изменяются соотношения ![]() и
и![]() .Нормальная сила
.Нормальная сила ![]() (направленная по ОХ, т. к
(направленная по ОХ, т. к ![]() <0, на рис.23) будет больше по модулю чем
<0, на рис.23) будет больше по модулю чем ![]() . (рис.24а)).
. (рис.24а)).

Разность этих сил создает момент относительно OY:  , который называется спиральным или перекрестным моментом рыскания.
, который называется спиральным или перекрестным моментом рыскания.
При вращении ВС относительно OY с угловой скоростью ![]() , правое полукрыло имеет большую скорость, а левое – меньшую скорость по отношению к скорости полета и
, правое полукрыло имеет большую скорость, а левое – меньшую скорость по отношению к скорости полета и ![]() и, например, для малых
и, например, для малых ![]() изображены на рис.24б). Разность этих сил создает момент
изображены на рис.24б). Разность этих сил создает момент  ,препятствующий (тормозящий) вращение относительно OY и поэтому называется демпфирующим. Пара разностей сил
,препятствующий (тормозящий) вращение относительно OY и поэтому называется демпфирующим. Пара разностей сил  по отношению к
по отношению к ![]() создают спиральный момент крена
создают спиральный момент крена ![]() .
.
3.2 Статическая устойчивость в боковом движении
Различают путевую и поперечную статическую устойчивость с фиксированными и освобожденными органами и рычагами управления.
Путевая (флюгерная) статическая устойчивость – это способность ВС, самостоятельно, без вмешательства пилота в управление, противодействовать (уничтожать, ликвидировать) изменению угла скольжения.
О путевой (флюгерной) устойчивости и неустойчивости судят по знаку частной производной коэффициента момента рыскания по углу скольжения ![]() , взятой в точке, соответствующей
, взятой в точке, соответствующей ![]() .
.
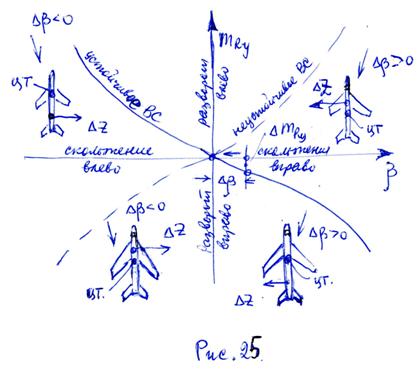
При изменении угла скольжения ![]() (рис.25) появляется
(рис.25) появляется ![]() <0, стремящийся развернуть ВС вправо, т. е. уменьшить скольжение. На рис. показаны зависимости
<0, стремящийся развернуть ВС вправо, т. е. уменьшить скольжение. На рис. показаны зависимости ![]() для устойчивого и неустойчивого ВС в путевом отношении.
для устойчивого и неустойчивого ВС в путевом отношении.
Частная производная ![]() называется степенью путевой статической устойчивости ВС.
называется степенью путевой статической устойчивости ВС.
При  - устойчивое ВС,
- устойчивое ВС, ![]() >0- неустойчивое,
>0- неустойчивое, ![]()
![]() - нейтральное в путевом отношении.
- нейтральное в путевом отношении.
Поперечная статическая устойчивость – это способность ВС, самостоятельно без вмешательства пилота в управление (противодействовать, уничтожать, ликвидировать) уменьшать возникший крен. При возникновении, например, правого крена появляется правое скольжение ![]() . Принимая во внимание зависимость
. Принимая во внимание зависимость ![]() (см. рис. 26), при
(см. рис. 26), при ![]()
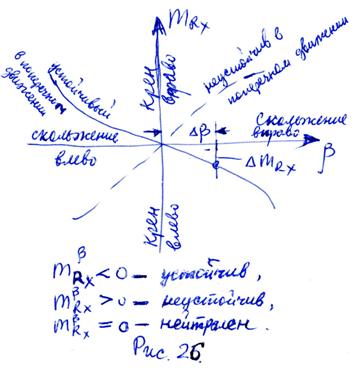
возникает момент  , который создает
, который создает ![]() и направлен на уменьшение крена. Это соответствует случаю, когда при возникновении скольжения ВС кренится в сторону отстающего полукрыла. Производная
и направлен на уменьшение крена. Это соответствует случаю, когда при возникновении скольжения ВС кренится в сторону отстающего полукрыла. Производная ![]() характеризует степень поперечной
характеризует степень поперечной
статической устойчивости ВС.
3.3 Балансировка ВС в установившемся боковом движении.
Характеристики поперечной и путевой статической управляемости
Рассмотрим сначала установившийся (![]() прямолинейный полет с креном и скольжением (движение при скосе ветром, отказе двигателей, несимметричной компоновке ВС и т. д.). Определим проекцию всех сил, действующих на ВС на OY и OZ связной системы координат (см. рис. 27)
прямолинейный полет с креном и скольжением (движение при скосе ветром, отказе двигателей, несимметричной компоновке ВС и т. д.). Определим проекцию всех сил, действующих на ВС на OY и OZ связной системы координат (см. рис. 27)
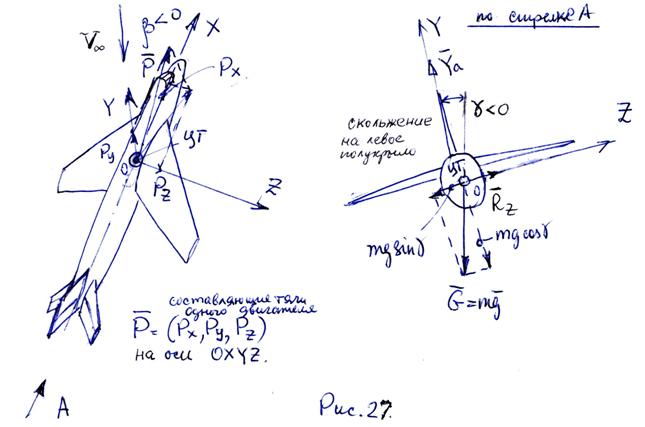
Из условия равновесия сил по оси OY имеем: ![]() откуда
откуда ![]() и, тогда
и, тогда ![]() .
.
Из условия равновесия по OZ (с учетом предыдущего соотношения)

Принимается, что  , тогда
, тогда  ;
;  ,
, ![]() - поперечная составляющая тяги двигателей; i-число двигателей.
- поперечная составляющая тяги двигателей; i-число двигателей.
Перейдем от сил и моментов к их коэффициентам, для чего разделим силы на qS, а моменты на qSl. Значения коэффициентов моментов приведены в (3.3), (3.4). Условия равновесия боковых моментов и сил примут вид
1. 
2.  (3.5)
(3.5)
3.  ;
;
Здесь: 
Балансировочные значения углов ![]() определяются из системы (3.5) в зависимости от угла скольжения. Пренебрегая
определяются из системы (3.5) в зависимости от угла скольжения. Пренебрегая  получим
получим
![]() (3.6)
(3.6)
 (3.7)
(3.7)
![]() (3.8)
(3.8)
Потребные для балансировки отклонения педалей ![]() и боковые отклонения штурвала (ручки)
и боковые отклонения штурвала (ручки) ![]() равны
равны
 (3.9)
(3.9)
где  - коэффициенты передачи соответственно для путевого и поперечного управления ВС;
- коэффициенты передачи соответственно для путевого и поперечного управления ВС;
![]() , (3.10)
, (3.10)
где  вычисляется по формулам (3.7) для случая фиксированных рычагов управления (педалей, штурвала).
вычисляется по формулам (3.7) для случая фиксированных рычагов управления (педалей, штурвала).
Из выражений (3.6)…(3.9) видно, что с увеличением степени поперечной и путевой статической устойчивости расходы руля направления, элеронов и рычагов управления растут.
Балансировочные значения  можно выразить и в зависимости от угла крена
можно выразить и в зависимости от угла крена ![]() . В этом случае (обозначив
. В этом случае (обозначив 
![]() (3.11)
(3.11)
где
![]() (3.12)
(3.12)
Так как  , то производные
, то производные ![]() и
и  будут иметь такой же знак как
будут иметь такой же знак как ![]() и
и ![]() . Значения производных
. Значения производных ![]() ,
, ![]() и
и  определяются по формулам (3.7), (3.8) и (3.10).
определяются по формулам (3.7), (3.8) и (3.10).
Лекция 6. 3.31. Усилия на рычагах управления элеронами и рулем направления в прямолинейном установившемся полете со скольжением
Усилия на штурвале (ручке) и педалях, потребные для балансировки ВС с обратимой и необратимой системами управления, можно представить в виде
 (3.13)
(3.13)
 (3.14)
(3.14)
Отличие для ОБУ и НБУ состоит лишь в том, что в (3.13) и (3.14) производные вычисляются по разному. Так как при НБУ усилия, которые должен прикладывать пилот к рычагам, зависят от характеристики загрузочных механизмов, то эти производные будут иметь вид
![]() (3.15)
(3.15)
![]() (3.16)
(3.16)
где  - градиенты усилий берутся из характеристик загрузочных механизмов; производные
- градиенты усилий берутся из характеристик загрузочных механизмов; производные ![]() определяются по формулам (3.7), (3.12) и (3.8) в которых
определяются по формулам (3.7), (3.12) и (3.8) в которых ![]() и
и ![]() надо брать для случая с фиксированным рычагом управления.
надо брать для случая с фиксированным рычагом управления.
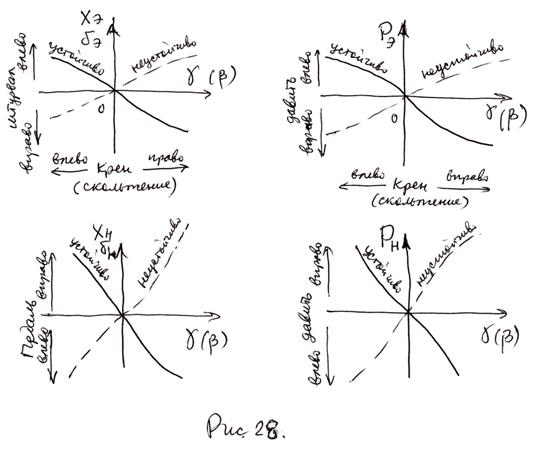
На рис 28 представлены типовые балансировочные зависимости, статически устойчивого и статически неустойчивого в поперечном и путевом отношении ВС при  неизменных конфигурации ВС и режима работы двигателей.
неизменных конфигурации ВС и режима работы двигателей.
Для нормального управления ВС требуется, чтобы все производные  были отрицательными.
были отрицательными.
Показатели поперечной статической управляемости:
 - называются соответственно коэффициентами расхода усилий и штурвала (ручки) управления на крен.
- называются соответственно коэффициентами расхода усилий и штурвала (ручки) управления на крен.
Показатели путевой (флюгерной) статической управляемости:  - называются коэффициентами расхода усилий и педалей на крен.
- называются коэффициентами расхода усилий и педалей на крен.
Для того чтобы ВС не было слишком «тяжелым» или «строгим» в поперечном и путевом управлении, производные ![]() ,
,![]() ,
, и
и  не должны выходить за допустимые пределы.
не должны выходить за допустимые пределы.
Гармоничность управления достигается за счет пропорциональности перемещений штурвала![]() и педалей
и педалей ![]() , т. е. за счет выбора производной
, т. е. за счет выбора производной
 (3.17)
(3.17)
где ![]()
![]()
![]() - выбираются при фиксированных рычагах управления, а
- выбираются при фиксированных рычагах управления, а ![]() - называют коэффициентом гармоничности управления, являющимся одним из показателей статической управляемости.
- называют коэффициентом гармоничности управления, являющимся одним из показателей статической управляемости.
Во всем диапазоне максимальные усилия не должны превышать физических возможностей пилота ![]() .
.
3.3.2 Балансировка с отказавшим двигателем
Особо опасным является движение при выполнении разворота в сторону отказавшего двигателя, т. к. в этом случае пилоту значительно труднее быстро определить отказ. Рассмотрим балансировку ВС в прямолинейном установившемся полете с несимметричной тягой (Рис.29).
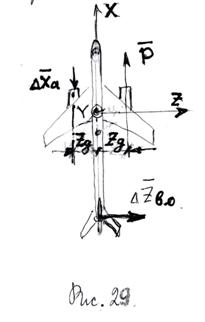
Например, при отказе (выключении) левого двигателя возникают дополнительные силы:![]() - сила дополнительного лобового сопротивления отказавшего двигателя;
- сила дополнительного лобового сопротивления отказавшего двигателя; ![]() - приращение поперечной силы вертикального оперения, обусловленного скосом потока
- приращение поперечной силы вертикального оперения, обусловленного скосом потока ![]() из-за влияния несимметричности струй двигателей. Дополнительные моменты и силы в проекциях на оси OXYZ равны
из-за влияния несимметричности струй двигателей. Дополнительные моменты и силы в проекциях на оси OXYZ равны
![]()
![]()
![]() ,
,
где принято:  обусловлены силой
обусловлены силой ![]() .
.
Переходя к коэффициентам сил и моментов, и принимая ![]() получим
получим
![]()
![]() (3.18)
(3.18)
![]()
Имея в виду (3.5), с точностью до ![]() , учитывая (3.18), получим условия балансировки с отказавшим одним двигателем
, учитывая (3.18), получим условия балансировки с отказавшим одним двигателем
![]()
![]() (3.19)
(3.19)
![]() .
.
Потребные для балансировки ВС углы ![]() принимая во внимание (3.6)÷(3.8), следующие:
принимая во внимание (3.6)÷(3.8), следующие:
![]()
 ; (3.20)
; (3.20)
 .
.
По этим формулам можно построить балансировочные зависимости потребных отклонений  в прямолинейном полете с одним отказавшим двигателем (рис.30) в зависимости от
в прямолинейном полете с одним отказавшим двигателем (рис.30) в зависимости от ![]() .
.
Из всех возможных режимов прямолинейного установившегося полета можно выделить три.
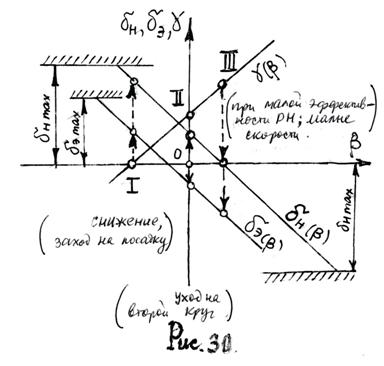
Полет без крена (режим I на зависимости ![]() , стрелками указаны потребные отклонения
, стрелками указаны потребные отклонения ![]() для балансировки). Этот режим с точки зрения «комфорта» экипажа и пассажиров наиболее приемлем. Но при этом потребные
для балансировки). Этот режим с точки зрения «комфорта» экипажа и пассажиров наиболее приемлем. Но при этом потребные ![]() и усилия на педалях близки к предельным, а скольжение
и усилия на педалях близки к предельным, а скольжение ![]() происходит в сторону отказавшего левого двигателя.
происходит в сторону отказавшего левого двигателя.
Полет без скольжения (режим II), при котором получается меньшая величина лобового сопротивления и требуется меньшая потребная тяга работающего двигателя, но крен при этом в сторону работающего двигателя может быть значительным.
Полет с креном и скольжением (режим III) на полукрыло с работающим двигателем с малыми потребными ![]() , но слишком большими
, но слишком большими ![]() .
.
Выбор того или иного способа балансировки ВС зависит от запаса тяги двигателей и эффективности руля направления и его триммера.
3.3.3. Балансировка ВС в установившемся криволинейном пространственном
движении
В установившемся криволинейном полете появляются дополнительные моменты, обусловленные вращением ВС относительно связанных осей OX, OY и OZ, которые должны быть уравновешены дополнительным отклонением органов управления креном, рысканием и тангажом. Рассмотрим в качестве примера «правильный вираж» (![]() ). Угловая скорость поворота траектории
). Угловая скорость поворота траектории ![]() (вдоль
(вдоль ![]() нормальной системы координат) имеет компоненты
нормальной системы координат) имеет компоненты ![]() и в соответствии с таблицей направляющих конусов
и в соответствии с таблицей направляющих конусов

Условия балансировки при принятых допущениях (см. (3.3), (3.4) и (2.24))
![]() ;
;
 ;
;

где 
Их этой системы потребные для правильного виража ![]() будут следующие
будут следующие ![]() (3.21)
(3.21)  ; (3.22)
; (3.22)
![]() , (3.23)
, (3.23)
где



Характеристики (показатели) боковой статической управляемости ВС в установившемся криволинейном движении
Для их определения принято рассматривать установившееся изолированное движение крена, вызванное ![]() и
и ![]() , а также установившееся изолированное движении рыскания, вызванное
, а также установившееся изолированное движении рыскания, вызванное ![]() . При таком подходе получаются приближенные условные показатели, не полностью отражающие фактическую управляемость, но оценивающую её удовлетворительно.
. При таком подходе получаются приближенные условные показатели, не полностью отражающие фактическую управляемость, но оценивающую её удовлетворительно.
Примем в (3.3) ![]() ;
; ![]() ;
;![]() ;
;![]() , то равновесие момента будет при условии
, то равновесие момента будет при условии
![]() .
.
Отсюда  или
или
![]() (3.24)
(3.24)
и после дифференцирования
![]()
![]() , (3,25)
, (3,25)
где ![]() принимается при фиксированном значении
принимается при фиксированном значении ![]() .
.
Для нормального управления требуется ![]() . Эта производная характеризуется эффективностью элерона в движении крена. Знак
. Эта производная характеризуется эффективностью элерона в движении крена. Знак ![]() зависит от знака
зависит от знака ![]() . При некоторой критической скорости полета и недостаточной жёсткости конструкции крыла на кручение, элероны могут потерять полную эффективность (
. При некоторой критической скорости полета и недостаточной жёсткости конструкции крыла на кручение, элероны могут потерять полную эффективность (![]() =0). При скорости большей критической наступает реверс элеронов (
=0). При скорости большей критической наступает реверс элеронов (![]() >0), который недопустим для пилотирования ВС.
>0), который недопустим для пилотирования ВС.
Производная ![]() ,характеризующая потребную величину отклонения штурвала (ручки) для создания
,характеризующая потребную величину отклонения штурвала (ручки) для создания ![]() =
= ![]() при
при  и
и  может быть вычислена по формуле (с учетом (3.24))
может быть вычислена по формуле (с учетом (3.24))
![]() (3.26)
(3.26)
При использование демпфера крена ![]() должна быть определена с учетом его работы. Производная
должна быть определена с учетом его работы. Производная ![]() называется коэффициентом расхода штурвала на угловою скорость крена.
называется коэффициентом расхода штурвала на угловою скорость крена.
Усилия на ручке управления, потребные для создания единицы угловой скорости крена при ![]() и
и ![]() оцениваются производной для ВС с НБУ
оцениваются производной для ВС с НБУ
![]() , (3.27)
, (3.27)
где  - характеристика загрузочного механизма и
- характеристика загрузочного механизма и ![]() принимается с учетом работы демпфера.
принимается с учетом работы демпфера.
Показатели поперечной статической управляемости (3.26), (3.27) ![]() ,
, ![]() должны быть отрицательными, а чтобы управление ВС не было слишком «тяжелым» или «строгим», их величина не должна выходить за определённые пределы.
должны быть отрицательными, а чтобы управление ВС не было слишком «тяжелым» или «строгим», их величина не должна выходить за определённые пределы.
При анализе установившегося вращения по крену, вызванному ![]() , можно аналогично получить коэффициенты расхода усилия и педалей на условия скорости крена
, можно аналогично получить коэффициенты расхода усилия и педалей на условия скорости крена
![]() ;
; ![]() ,
,
которые также являются показателями боковой статической управляемости
Ограничимся определением установившегося значения угловой скорости крена при отклонении руля направления на угол ![]() и её производной по
и её производной по ![]() . Полагая (в целях упрощения анализа) в формулах (3
. Полагая (в целях упрощения анализа) в формулах (3![]() ;
;![]() ;
;![]() ;
; )
)

 (3.28)
(3.28)
Из этой системы найдем
 (3.29)
(3.29)
Дифференцируя по ![]() , получим
, получим
 (3.30)
(3.30)
Эта производная характеризует реакцию ВС на отклонение руля направления. При ![]() будет прямая привычная реакция для пилота, а при (<0) – обратная реакция по крену на отклонение руля направления.
будет прямая привычная реакция для пилота, а при (<0) – обратная реакция по крену на отклонение руля направления.
Обратная реакция может наблюдаться при ![]() в области (М
в области (М![]() 0,8-1,2) и при малых углах атаки, когда ô
0,8-1,2) и при малых углах атаки, когда ô![]() ô-малы.
ô-малы.
В качестве показателей путевой статической управляемости принимаются коэффициенты расхода усилий педали на угловую скорость рыскания  и
и  при М=const.
при М=const.
Имеются и другие показатели статической управляемости.
АП-25.25.147. Путевая и поперечная управляемость.
Должна иметь возможность при нулевом крене совершать разворот в сторону работающего двигателя и безопасно выполнять достаточно разное изменение курса до ![]() в направлении критического неработающего двигателя.
в направлении критического неработающего двигателя.
Для самолетов с четырьмя или более двигателями должны выполняться виражи с креном ![]() в сторону неработающих или противоположную неработающим двигателям из режима установившегося полета при скорости 1,4
в сторону неработающих или противоположную неработающим двигателям из режима установившегося полета при скорости 1,4 ![]() (1,4 скорости сваливания или
(1,4 скорости сваливания или ![]() установившегося полёта)
установившегося полёта)
При работе всех двигателей реакция самолета по крену должна быть достаточной для выполнения обычных манёвров.
(А) Эффективность поперечного управления должна обеспечивать вывод самолета из установившегося разворота с креном![]() (при отклонении только штурвала по крену не более чем на
(при отклонении только штурвала по крену не более чем на ![]() ) за время не более 7с на режимах; взлета, (При безопасной скорости
) за время не более 7с на режимах; взлета, (При безопасной скорости ![]() ); заход на посадку (на скорости захода на посадку со всеми работающими двигателями
); заход на посадку (на скорости захода на посадку со всеми работающими двигателями ![]() ); на крейсерских режимах и режимах набора высоты и снижения.
); на крейсерских режимах и режимах набора высоты и снижения.
(с) Характеристики переходных процессов при отказе критического двигателя и невмешательстве пилота в управление в течение 5с после отказа должны быть такими, чтобы исключался выход самолета за эксплуатационные ограничения по ![]() ,
, ![]() и
и ![]() и чтобы
и чтобы ![]() был
был ![]() .
.
25.143. Приделы «Физической силы пилота» не должны превышать значения таблицы 1
Сила, прикладываемая пилотом к штурвалу или педалям, кг | Тангаж | Крен | Рыскание |
Кратковременное усилие | 35,0 | 27,0 | 70,0 |
Продолжительное усилие | 4,5 | 2,50 | 9,0 |
25.177. На всех режимах полета должна соблюдаться боковая устойчивость. Допускается поперечная статическая неустойчивость, если неустойчивое движение развивается плавно, легко распознаётся и парируется пилотом (отклонение элеронов по знаку отклонению руля направления).
Лекция 7. 4. Динамика возмущенного движения. Уравнения возмущенного движения ВС и методы их исследования
Собирая вместе динамические и кинематические уравнения движения ВС, как материальные точки, и его вращательные движения вокруг центра масс (тяжести), Обозначим их в виде системы нелинейных дифференциальных уравнений
 ,
,  (4.1)
(4.1)
здесь  -фазовые переменные;
-фазовые переменные; ![]() - управляющие воздействия на ВС,
- управляющие воздействия на ВС, ![]() -нелинейные функции соответствующих аргументов. Фазовыми переменными являются:
-нелинейные функции соответствующих аргументов. Фазовыми переменными являются: ![]() (15 переменных). Управляющие воздействия:
(15 переменных). Управляющие воздействия:  и т. д.; t-независимая переменная, чаше всего-время;
и т. д.; t-независимая переменная, чаше всего-время;  - начальные условия (Н. У) при
- начальные условия (Н. У) при ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
