

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лекция 9. 5.3.2 Характеристики переходных процессов в короткопериодическом движении
Поведение ВС в короткопериодическом (быстром, вращательном) движении определяется потребной нормальной скоростной перегрузкой nya для угловой ориентации, точной стабилизации. Определим сначала передаточную функцию![]() . Перегрузка
. Перегрузка
![]()
![]() ;
;
(![]() ;
; ![]() ;
; ![]() ),
),
или, в возмущенном движении,
![]() ;
;
и преобразование Лапласа
Δnya(p) = ![]() Δα(p).
Δα(p).
Передаточная функция ![]() =
= ![]() и поскольку величина nykα = nyaα =
и поскольку величина nykα = nyaα = ![]() , то можно воспользоваться обозначением, принятым в системе уравнений (5.22) nyaα = , тогда
, то можно воспользоваться обозначением, принятым в системе уравнений (5.22) nyaα = , тогда ![]() =
= ![]() .
.
Передаточная функция  может быть представлена следующим образом
может быть представлена следующим образом
![]()
и с учетом предыдущих соотношений и (5.25)
![]() (5.26)
(5.26)
(перед единицей в знаменателе принимается «+» для устойчивых систем), где ![]() =
= ![]() Kα и Kα с использованием (5.12)
Kα и Kα с использованием (5.12)
 .
.
Определим теперь коэффициент Kny
![]() , (5.27)
, (5.27)
поскольку из условия балансировки ![]() и уравнения (2.47) было выведено ранее
и уравнения (2.47) было выведено ранее
![]() и
и ![]() .
.
Рассмотрим решение одной из задач, когда в качестве входного воздействия принято δв(t) = 1(t) и соответственно δв(p) = . Определим переходную функцию, описывающую переходный процесс по времени при ступенчатом отклонении рулей в возмущенном движении. Переходя от изображения Δnya(p) = Wny/δв Δδв(p) к оригиналу, получим (![]() ).
).
 (5.28)
(5.28)
или
![]() , (5.29)
, (5.29)
где Δnyaуст проще вычислить, как предел на основе теоремы 2 (формула 4.21).
![]() .
.
Здесь Т – постоянная времени;![]() - относительный коэффициент демпфирования;
- относительный коэффициент демпфирования;
φ = arcsin - сдвиг собственных колебаний по фазе; ![]() к =
к =  .
.
На основании (5.28), (5.29) можно определить динамические показатели устойчивости и управляемости ВС, по которым оценивают качество переходного процесса
период собственных колебаний ВС
 (5.30)
(5.30)
частоту собственных колебаний
![]() (5.31)
(5.31)
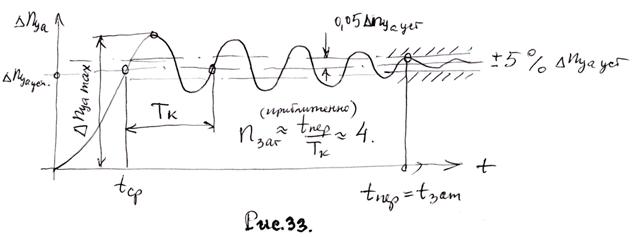
время переходного процесса, например, когда Δnya(t) входит в 5% трубку «относительно установившегося состояния» Δnyaуст, т. е. по (5.29).
![]() или
или ![]() ,
,
откуда приближенно
![]() (5.32)
(5.32)
(tпер – иногда называют временем затухания).
Число колебаний до практически полного затухания
 . (5.33)
. (5.33)
Относительный заброс перегрузки при достижении своего первого экспериментального значения
 (5.34)
(5.34)
соответствует моменту времени t1 = ![]() ;
;
время срабатывания – время первого выхода регулируемого параметра движения на его установившееся значение (в частности, Δnyaуст) или, при ![]() , на значение равное 0,95 от установившегося значения в случае апериодического переходного процесса
, на значение равное 0,95 от установившегося значения в случае апериодического переходного процесса
 (5.35)
(5.35)
Иногда рассматривают изменение амплитуды колебаний за один период, время уменьшения амплитуды вдвое (t2) и т. п….
Основные характеристики колебательного переходного процесса (переходной функции) представлены на рис.33.
 Относительный заброс перегрузки (иногда называют величиной перерегулирования), как видно из (5.34) зависит от
Относительный заброс перегрузки (иногда называют величиной перерегулирования), как видно из (5.34) зависит от![]() . Аналогично от
. Аналогично от![]() зависит tпер = tзат. Приближенные зависимости представлены на рис.34.
зависит tпер = tзат. Приближенные зависимости представлены на рис.34.
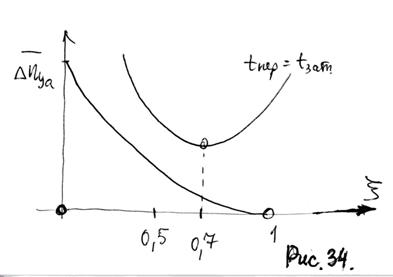
Из рисунка видно, что при ![]() (
(![]() >
>![]() ) переходный процесс становится апериодическим и корни уравнения p2 + 2hk p +
) переходный процесс становится апериодическим и корни уравнения p2 + 2hk p +![]() = 0 действительные. Тогда (pi
= 0 действительные. Тогда (pi ![]() )
)
![]() . (5.36)
. (5.36)
5.3.3 Передаточные функции возмущенного траекторного движения ВС в вертикальной плоскости (включая длиннопериодическое). Уравнения возмущенного движения ВС с учетом (5.2) и (5.17) рассматриваются для ![]() ,
, ![]() ,
, ![]() и
и ![]() . В этих уравнениях производится учет влияния ΔH на ΔV и Δθ, и в качестве управляющих воздействий вместо Δcp и Δδв приня - ты Δnдв =
. В этих уравнениях производится учет влияния ΔH на ΔV и Δθ, и в качестве управляющих воздействий вместо Δcp и Δδв приня - ты Δnдв = ![]() и Δ . В традиционных уравнениях
и Δ . В традиционных уравнениях ![]() коэффициенты
коэффициенты ![]() следу - ющие:
следу - ющие: ![]()
![]()
![]()


![]()
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]()
![]() . После преобразования Лапласа при нулевых начальных условиях нетрудно получить передаточные функции траекторного движения ЦМ ВС в канале тангажа:
. После преобразования Лапласа при нулевых начальных условиях нетрудно получить передаточные функции траекторного движения ЦМ ВС в канале тангажа:
![]() ; (5.37)
; (5.37)
где: ;
;![]() ;
;![]() ;
;
![]() ; (5.38)
; (5.38)
![]() ,
, ![]() (5.39)
(5.39)
где  ;
;
![]() . (5.40)
. (5.40)
Передаточные функции в канале двигателя
![]() (5.41)
(5.41)
![]() (5.42)
(5.42)
![]() (5.43)
(5.43)
В траекторном движении принимается, что ВС сбалансировано и приближенно
![]() Кроме того,
Кроме того, ![]()
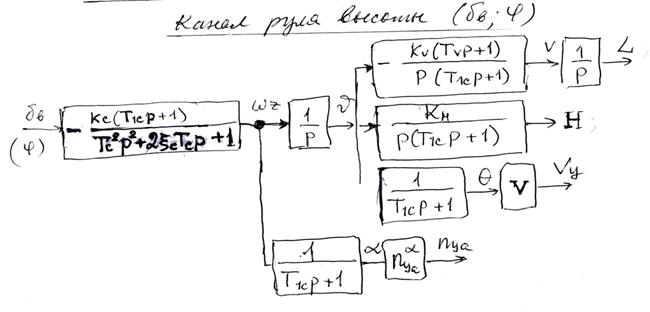
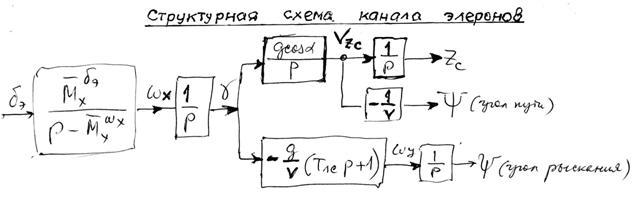
5.3.4 Схемы основных передаточных функций. Канал руля высоты (δв; φ)
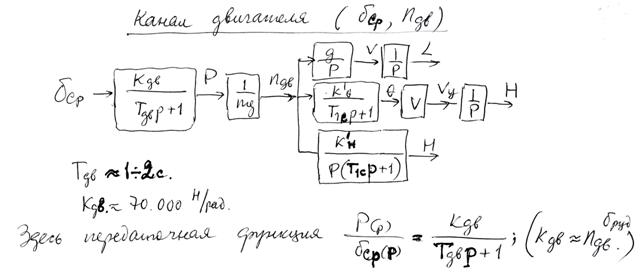 приближенно описывает динамику запаздывания установления тяги двигателя. Возможны и другие более точные математические модели, описывающие работу двигателя.
приближенно описывает динамику запаздывания установления тяги двигателя. Возможны и другие более точные математические модели, описывающие работу двигателя.
6. Динамика бокового возмущенного движения ВС
Будем полагать, что управление продольным движением определено и фиксировано, а начальное отклонение параметров продольного движения и возмущающие действия, влияющие на продольное движение, отсутствуют. Ввиду того, что боковое движение сопровождается вращением относительно двух осей OX и OY, оно в известном смысле сложнее, чем продольное относительно оси OZ. При достаточно больших возмущениях боковое движение вызывает существенное изменение параметров продольного и изолированное боковое возмущенное движение изучать некорректно. Таким образом, в отличие от продольного изолированное боковое движение может рассматриваться только при малых возмущениях. В боковом движении действуют гироскопические, инерционные моменты, а также силы и моменты, обусловленные аэродинамическим и кинематическим воздействием. Чтобы упростить исследования бокового возмущенного движения примем за опорный (невозмущенный) - прямолинейный установившийся (Vْ= const), горизонтальный (Hْ=const, αْ=αбал =const, θْ = 0, αбалْ= ) полет без крена и скольжения (γаْ=βْ=0).
6.1 Уравнения бокового возмущенного движения
Уравнения бокового возмущенного движения относительно произвольного опорного (невозмущенного) режима движения рассмотрены ранее и представлены в виде системы (4.6). Если в качестве опорного принять режим, указанный выше, то система уравнений упрощается и с учетом малости углов γ, β(γ, β≤20ْ) и кинетических соотношений, получим
![]() ;
;
![]() ;
;
![]() ;
;
![]() ; (6.1)
; (6.1)
![]() ;
;
![]() .
.
Здесь приняты допущения и обозначения:![]()
 ;
;![]() ;
; ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;  ;
;  ;
;
![]() ;
; ![]() ;
; ![]() ;
;![]() ;
;  ;
;  ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ;
; ;
;
![]() , т. к.
, т. к. ![]() ,
, ![]() , то
, то ![]()
![]() .
.
Вводя стандартные матричные обозначения для системы (6.1), имеем
![]() .
.
После преобразования Лапласа при нулевых начальных условиях ![]() , которое приводится к виду
, которое приводится к виду
![]() . (6.2)
. (6.2)
6.2 Устойчивость в боковом возмущенном движении.
В уравнении (6.2) (pE - A), совпадающее по форме с (λE - A) и может быть использовано для составления характеристического уравнения
![]() ,
,
после раскрытия которого, получаем
![]() , (6.3)
, (6.3)
где: ;
;
![]() ;
;![]()
![]() .
.
Уравнение (6.3) приводится к виду
![]() (6.4)
(6.4)
Здесь  . Приближенное значение большого корня
. Приближенное значение большого корня ![]() можно получить, пренебрегая в уравнении (6.3) слагаемыми со степенями p ниже третьей. Получим
можно получить, пренебрегая в уравнении (6.3) слагаемыми со степенями p ниже третьей. Получим  или
или
![]() (6.5)
(6.5)
Из трех слагаемых наибольшим здесь является ![]() и в первом приближении можно принять
и в первом приближении можно принять ![]() . Приближенное значение малого корня
. Приближенное значение малого корня  можно оценить, отбросив в (6.3) три первых слагаемых. Получим
можно оценить, отбросив в (6.3) три первых слагаемых. Получим
![]() . (6.6)
. (6.6)
Приближенные значения действительных корней можно найти методом последователь - ных приближений или любым другим способом.
Вычислив p1 и p2 по (6.4), определим p3,4:
![]() . (6.7)
. (6.7)
Из уравнений (6.3), (6.4) следует
![]() ; (6.8)
; (6.8)
![]() ,
,
откуда
![]()
 . (6.9)
. (6.9)
В уравнении (6.3) для ![]() ,
, ![]() при
при ![]() ≤
≤![]() доп обычно
доп обычно ![]() ,
, ![]() ,
, ![]() . Однако а0, характеризующий апериодическую устойчивость может быть как положительным, так и отрицательным. В соответствии с (6.8) при
. Однако а0, характеризующий апериодическую устойчивость может быть как положительным, так и отрицательным. В соответствии с (6.8) при ![]() , корень p2 может иметь любой знак. При
, корень p2 может иметь любой знак. При ![]() ВС будет медленно (т. к. корень маленький) отклоняться от исходного режима, развивая Δβ, Δωy, Δωx и Δγ по апериодическому закону. Медленный нарастающий крен Δγ(t) вызовет разворот и снижение ВС по пологой спирали. В связи с этим движение, соответствующее малому корню p2 = pсп, называется спиральным.
ВС будет медленно (т. к. корень маленький) отклоняться от исходного режима, развивая Δβ, Δωy, Δωx и Δγ по апериодическому закону. Медленный нарастающий крен Δγ(t) вызовет разворот и снижение ВС по пологой спирали. В связи с этим движение, соответствующее малому корню p2 = pсп, называется спиральным.
По критерию Рауса-Гурвица к условиям ![]() ,
, ![]() ,
, ![]() следует добавить
следует добавить
![]()
 , (6.10)
, (6.10)
которые представляют собой (при ![]() ,
, ![]() ,
, ![]() ) соответственно условия апериодической и колебательной устойчивости. Границами апериодической и колебательной устойчивости являются
) соответственно условия апериодической и колебательной устойчивости. Границами апериодической и колебательной устойчивости являются
![]() , где
, где
![]() .
.
При этом важное значение имеет соотношение величин ![]() и
и ![]() , которое приближено оценивается параметром æ
, которое приближено оценивается параметром æ . Границы устойчивости можно нанести в координатах
. Границы устойчивости можно нанести в координатах ![]() (см. рис. 35).
(см. рис. 35).
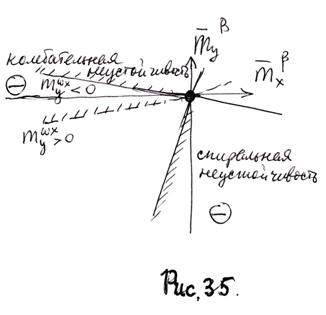
Для ВС, обладающего статической устойчивостью в путевом ![]() и поперечном
и поперечном ![]() отношении при появлении скольжения будут возникать «восстанавливающие» моменты
отношении при появлении скольжения будут возникать «восстанавливающие» моменты ![]() и
и ![]() , уменьшающие скольжение и крен (возникший в результате скольжения).
, уменьшающие скольжение и крен (возникший в результате скольжения).
Пусть ВС накренилась вправо ![]() . В соответствии с (6.1) появится
. В соответствии с (6.1) появится ![]() и пропорционально ему моменты
и пропорционально ему моменты  и
и  , под действием которых уменьшаются γ и β. Если
, под действием которых уменьшаются γ и β. Если ![]() велика, то сначала произойдет уменьшение до нуля угла β, а угол крена не успеет обнулиться, т. е. останется величина
велика, то сначала произойдет уменьшение до нуля угла β, а угол крена не успеет обнулиться, т. е. останется величина ![]() , т. к.
, т. к. ![]() и отсутствует «восстанавливающий» момент по крену. Таким образом, при больших
и отсутствует «восстанавливающий» момент по крену. Таким образом, при больших ![]() и малых
и малых ![]() появляется остаточный крен, и движение будет происходить по спирали. Если наоборот,
появляется остаточный крен, и движение будет происходить по спирали. Если наоборот, ![]() мала, то β будет уменьшаться медленно, а угол крена – быстро. В момент, когда крен станет нулевым, положительное β еще останется и ВС будет продолжать вращаться относительно OX. Левое полукрыло опускается. Появляется
мала, то β будет уменьшаться медленно, а угол крена – быстро. В момент, когда крен станет нулевым, положительное β еще останется и ВС будет продолжать вращаться относительно OX. Левое полукрыло опускается. Появляется ![]()
![]() и благодаря моменту
и благодаря моменту ![]() появится угловая скорость и крен в обратную сторону. Такое движение ВС называют «голландским шагом», имеющим форму «змейки». В виду того, что спиральное движение протекает относительно медленно (вяло) из-за малого значения p2 оно слабо ощущается пилотом, даже в случае некоторой спиральной неустойчивости. Что касается характеристик колебательного движения – оно должно быть обязательно устойчивым. (АП-
появится угловая скорость и крен в обратную сторону. Такое движение ВС называют «голландским шагом», имеющим форму «змейки». В виду того, что спиральное движение протекает относительно медленно (вяло) из-за малого значения p2 оно слабо ощущается пилотом, даже в случае некоторой спиральной неустойчивости. Что касается характеристик колебательного движения – оно должно быть обязательно устойчивым. (АП-
АП-25 25.177 d) В диапазоне скоростей от VMO/MMO–VFC/MFC максимальной эксплуатационной до максимальной скорости (М) для характеристик устойчивости допускается поперечная статическая неустойчивость, если неустойчивое движение развивается плавно, легко распознается и парируется пилотом. (отклонение элеронов обратное по знаку отклонения руля направления). В ранних НЛГС указывалось, что затухание боковых колебаний до 5% начальной амплитуды должно происходить не более чем за 12 секунд на взлетно-посадочных режимах и не более чем за 20 секунд на крейсерских режимах полета. Что касается спирального движения, при его неустойчивости допускается увеличение вдвое угла крена не менее чем за 20 секунд.
Лекция 10. 6.2.1 Устойчивость быстрого бокового движения
В (6.1), полагая cosα ≈ 1, sinα ≈ 0, δн/δэ = 0, ![]() ;
; ![]() =0 получаем две системы, которые можно изучать раздельно:
=0 получаем две системы, которые можно изучать раздельно:
![]() ;
;
![]() , (6.11)
, (6.11)
описывающую движение рыскания и
![]() ;
;
![]() (6.12)
(6.12)
- движение крена. Причем система (6.11) может исследоваться независимо от (6.12), в свою очередь устойчивость системы (6.12) можно анализировать только по первому уравнению.
Характеристическое уравнение системы (6.11)
![]() , (6.13)
, (6.13)
где:  ;
;  .
.
Корни этого уравнения комплексные и движение носит колебательный характер
![]() ;
;
![]() . (6.14)
. (6.14)
С учетом решения для β(t), характеристическое уравнение (6.12) имеет вид
![]() (6.15)
(6.15)
и решение его
![]() . (6.16)
. (6.16)
Изменение ωx в соответствии с (6.16), (6.12) и (6.14) будет следующим
![]() . (6.17)
. (6.17)
Устойчивость по критерию Рауса –Гурвица(при ![]() ) достигается при
) достигается при
![]()
 , (6.18)
, (6.18)
где
![]() ; (6.19)
; (6.19)
![]()
![]() - относительная плотность ВС в боковом движении.
- относительная плотность ВС в боковом движении. ![]() - называют степеньо статической устойчивости по каналу рыскания.
- называют степеньо статической устойчивости по каналу рыскания.
6.3Передаточные функции в боковом возмущенном движении
Изолированное движение рыскания. Из системы (6.12) после преобразования Лапласа получаем
 ; (6.20)
; (6.20)
где: ;
;  ;
;  ;
;  ;
;  ;
;
hδ – декремент затухания углового движения в боковой плоскости;
ωδ – частота недемпфированных колебаний в боковом движении.
 . (6.21)
. (6.21)
Изолированное движение крена
В уравнениях (6.12) пренебрегаем составляющими ![]() и
и ![]() и после преобразования Лапласа получаем
и после преобразования Лапласа получаем
![]() ; (6.22)
; (6.22)
где: ;
;![]() ;
;
![]() . (6.23)
. (6.23)
Из первого уравнения системы (6.1), предполагая ![]() (угол
(угол ![]() «установился»),
«установился»), ![]() при
при
малых![]() и
и![]() после преобразования Лапласа
после преобразования Лапласа
![]() . (6.24)
. (6.24)
Здесь
 , (см.(5.37));
, (см.(5.37));![]()
Траекторное движение центра масс ВС. Будем предполагать, что ВС сбалансировано по моментам  откуда
откуда
Примем, что: 
где
 (6.25)
(6.25)
Рассмотрим уравнение для ![]() системы (6.1)
системы (6.1)
![]()
Здесь выражение в скобках соответствует приближенно углу пути ![]() , т. е. можно записать
, т. е. можно записать
![]()
Продифференцируем это уравнение по времени ![]()
![]()
где приближенно  и соответствующая система уравнений возмущенного траекторного движения может быть представлена в следующем виде
и соответствующая система уравнений возмущенного траекторного движения может быть представлена в следующем виде
![]()

 (6.26)
(6.26)
После преобразования Лапласа, определяются передаточные функции:
![]() ;
;![]()
![]() (6.27)
(6.27)
Рассмотрим основные передаточные функции в боковом возмущенном движении во взаимосвязи между собой
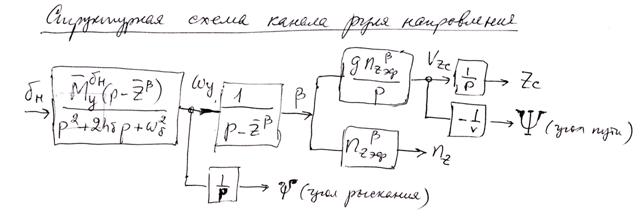
6.4. Анализ переходных процессов в боковом возмущенном движении.
6.4.1. Реакция ВС на отклонение элеронов
Для определения характеристик переходного процесса необходимо рассмотреть переда-

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
