

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
точную функцию  более общего вида, чем ранее. С этой целью в уравнении
более общего вида, чем ранее. С этой целью в уравнении
(см. систему (4.6)) для ![]() учитывается составляющая
учитывается составляющая ![]() , и в итоге получаем
, и в итоге получаем
 (6.28)
(6.28)
где .
.
Характер переходных процессов по![]() определяется параметром
определяется параметром
![]()

 (6.29)
(6.29)
и при ![]() (
( ) переходный процесс
) переходный процесс ![]() имеет апериодический характер.
имеет апериодический характер.
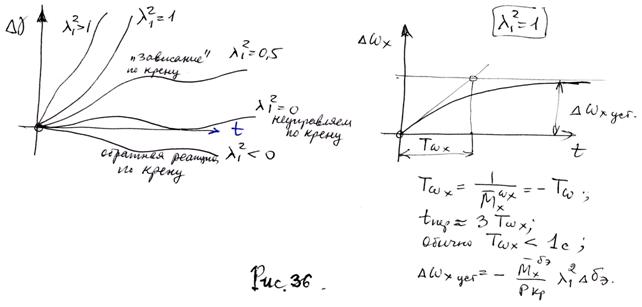
В этом случае передаточная функция принимает вид (6.23) На рис. 36 представлены переходные процессы по углу крена при различных значениях ![]() и
и ![]()
6.4.2. Реакция ВС на отклонение руля направления
Передаточные функции, описывающие переходные процессы по ![]() и
и ![]() , с использованием полной системы (4.9) имеют вид:
, с использованием полной системы (4.9) имеют вид:
 ; (6.30)
; (6.30)
где:  ;
;  ;
;
 , (6.31)
, (6.31)
где  ;
;  и обычно обозначают
и обычно обозначают ![]() , который вычисляется по формуле (6.29) при замене в ней
, который вычисляется по формуле (6.29) при замене в ней ![]() на
на ![]() в выражениях производных. Характер переходного процесса по
в выражениях производных. Характер переходного процесса по ![]() в зависимости от
в зависимости от ![]() аналогичен тому, что показано на рис. 36. Переходный процесс по
аналогичен тому, что показано на рис. 36. Переходный процесс по ![]() аналогичен графику переходной функции колебательного звена. Основные показатели переходных процессов рассчитываются так же, как показано в разделе (5.3.2.) при подставке вместо
аналогичен графику переходной функции колебательного звена. Основные показатели переходных процессов рассчитываются так же, как показано в разделе (5.3.2.) при подставке вместо ![]() и
и ![]() соответственно величин
соответственно величин ![]() .
.
7. Особенности динамики пространственного движения
При движении в самом общем случае (нестационарные нелинейные режимы, сваливание, штопор и др.) учитываются четыре вида взаимодействия:
- кинематическое, обусловленное наличием ![]() , т. к. при вращении ВС относительно ОХ производит циклическое изменение
, т. к. при вращении ВС относительно ОХ производит циклическое изменение ![]() и
и ![]() . Такое взаимодействие особенно ярко выраженное для спортивных и других маневренных самолетов. Для ВС – в меньшей степени.
. Такое взаимодействие особенно ярко выраженное для спортивных и других маневренных самолетов. Для ВС – в меньшей степени.
- аэродинамическое, определяемое влиянием ![]() на аэродинамические характеристики бокового движения.
на аэродинамические характеристики бокового движения.
- гироскопическое, обусловленное появлением дополнительных гироскопических моментов, если ось вращения ротора ТРД или ТВД не совпадает с осью вращения ВС;
- инерционное, из-за появления дополнительных инерционных моментов, когда ось вращения ВС не совпадает ни с одной из главных осей инерции.
Поскольку ВС не является высоко маневренным самолетом, то наибольшее влияние из вышеперечисленных факторов в области нормальной эксплуатации ВС на динамику движения оказывают первые два. Вне области нормальной эксплуатации ВС (ошибки пилотирования, отказы в системе управления, особо интенсивные внешние возмущения и др.) весьма опасны так называемые критические режимы. Для современных самолетов наиболее характерны следующие критические формы движения: сваливание, штопор, аэроинерционное самовращение, срыв, самопроизвольное кренение. Два первых свойственны как дозвуковым, так и сверхзвуковым ВС И возникают из-за потери устойчивости и авторотации на больших околокритических и закритических углах атаки. Аэроинерционное самовращение (инерционное вращение) характерно для скоростных маневренных самолетов и возникает при превышении критической угловой скорости крена. Срыв самолета связан с потерей боковой (флюгерной) устойчивости и возникает, как правило, при превышении эксплуатационных чисел М полета. Самопроизвольное кренение возникает при превышении эксплуатационных значений индикаторной скорости Vi (скоростного напора) и связано с развитием упругих деформаций и часто с реверсом элеронов.
Рассмотрим несколько подробнее особенности сваливания и штопора.
7.1. Сваливание.
Сваливанием ВС называют непроизвольное быстро развивающееся движение со значи-тельной угловой скоростью и амплитудой, не парируемое летчиком, обусловленное потерей устойчивости на больших околокритических и критических углах атаки. Причины несим - метричных срывов на поверхности крыла: наличие ![]() , конструктивной нежесткости. На рис.37 показано влияние
, конструктивной нежесткости. На рис.37 показано влияние ![]() на величину угла атаки сваливания
на величину угла атаки сваливания ![]() .
.
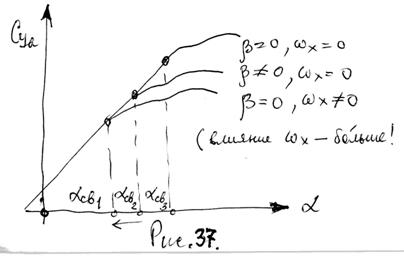
При полной симметрии срывов потока на верхней поверхности крыла, возможно, очень редко, симметричное сваливание на нос.
Виды сваливания:
1) сваливание на нос;
2) сваливание на крыло с пространственным апериодическим движением;
3) сваливание с резким разворотом по курсу с пространственным апериодическим движением;
4) сваливание с интенсивным кабрированием и пространственным апериодическим движением;
5) сваливание колебательное;
6) глубокое сваливание.
Лекция 11. 7.2. Авторотация
В начальный момент сваливания ВС приближается по углу атаки, близком к критическому, и при ![]() при наличии
при наличии ![]() вместо демпфирующих (тормозящих вращение) моментов крена и рыскания возникают авторотирующие (раскручивающие) моменты.
вместо демпфирующих (тормозящих вращение) моментов крена и рыскания возникают авторотирующие (раскручивающие) моменты.
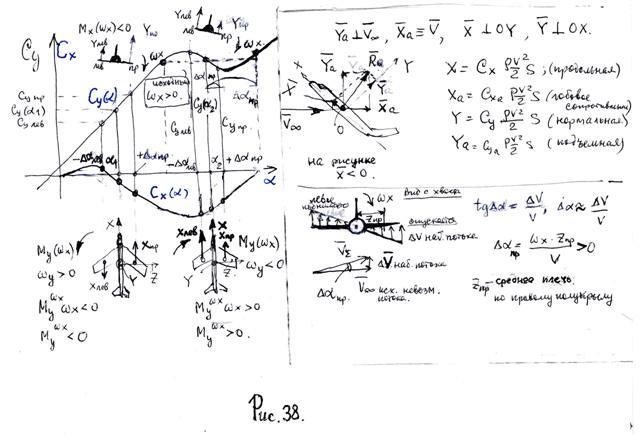
Рассмотрим движение при ![]() и
и ![]() с угловой скоростью
с угловой скоростью ![]() (правое полукрыло опускается). На опускающемся полу крыле всегда угол атаки увеличивается на величину
(правое полукрыло опускается). На опускающемся полу крыле всегда угол атаки увеличивается на величину ![]() , при этом коэффициент нормальной силы до
, при этом коэффициент нормальной силы до ![]() увеличивается, а при
увеличивается, а при ![]() сначала уменьшается, а затем может снова увеличиваться в зависимости от величины
сначала уменьшается, а затем может снова увеличиваться в зависимости от величины ![]() . На рис.38 при
. На рис.38 при ![]() ,
, ![]()
 и
и  , т. е.
, т. е.  , следова-тельно, момент – демпфирующий. При
, следова-тельно, момент – демпфирующий. При ![]() и малых
и малых ![]() ,
, ![]() ,
, ![]() , т. е.
, т. е. ![]() и момент – авторотирующий; при этом же исходном
и момент – авторотирующий; при этом же исходном ![]() и больших
и больших  может оказаться, что момент станет снова демпфирующим.
может оказаться, что момент станет снова демпфирующим. ![]() . В результате в зависимости от исходного
. В результате в зависимости от исходного  и значений
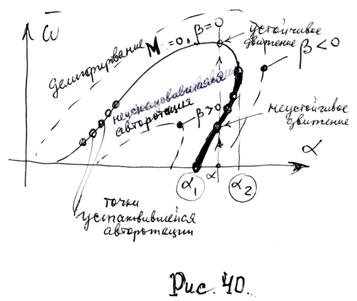
и значений ![]() можно построить «диаграмму авторотации» (см. рис. 39).
можно построить «диаграмму авторотации» (см. рис. 39).
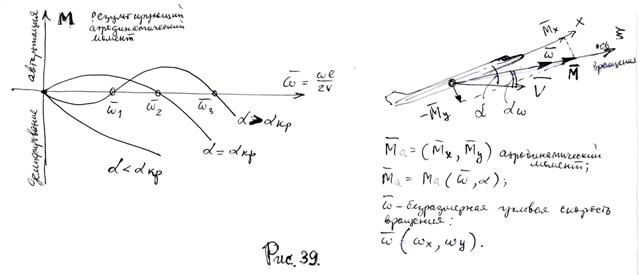
Установившееся вращение будет в точках ![]()
![]() ,
, ![]()
![]() ,
,![]()
 ; при этом, при
; при этом, при ![]() 1 - будет неустойчивое вращение, а при
1 - будет неустойчивое вращение, а при ![]()
![]() и
и ![]() - устойчивые режимы вращения, что не трудно проверить по методу малых возмущений. Эту диаграмму можно перестроить в координатах
- устойчивые режимы вращения, что не трудно проверить по методу малых возмущений. Эту диаграмму можно перестроить в координатах ![]() . В результате получаем зависимость
. В результате получаем зависимость ![]() , в которой в диапазоне углов атаки от
, в которой в диапазоне углов атаки от ![]() до
до ![]() будут два режима установившейся авторотации; на меньших
будут два режима установившейся авторотации; на меньших![]() - неустойчивое вращения; при
- неустойчивое вращения; при ![]() - больших – устойчивое вращение. Этот особый случай называется латентной (скрытой) авторотацией.
- больших – устойчивое вращение. Этот особый случай называется латентной (скрытой) авторотацией.
При изменении скольжения  происходит расширение/ сужение области неустановившейся авторотации.
происходит расширение/ сужение области неустановившейся авторотации.
7.3. Штопор
Авторотация ВС на закритических углах приводит к штопору. Этот режим наиболее опасный из всех критических режимов полета. В штопоре ВС совершает непроизвольное движение по крутой спирали траектории малого радиуса на режиме авторотации с одновременным вращением относительно трёх осей. При этом принимаются во внимание все виды взаимодействия (инерционное, кинематическое, аэродинамическое, гироскопическое). Рассмотрим влияние только одного из них – влияние инерционных моментов на режим движения в штопоре
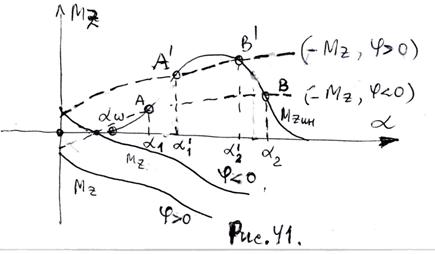
Пусть ![]() и
и  представлены на рис. 41, где
представлены на рис. 41, где![]() ;
;![]() ;
; ![]() - сумма аэродинамического продольного момента (момента тангажа)
- сумма аэродинамического продольного момента (момента тангажа) ![]() и инерционного
и инерционного ![]() , обусловленного угловой скоростью
, обусловленного угловой скоростью ![]() . В точках А и В будет установившееся вращение ВС в штопоре, причем режимы в т. А и В будут соответственно неустойчивый и устойчивый.
. В точках А и В будет установившееся вращение ВС в штопоре, причем режимы в т. А и В будут соответственно неустойчивый и устойчивый.
В данном случае будет устойчивое вращение на большом угле атаки ![]() . Вывод из штопора (который в этом случае называется плоским) будет затруднённым, вследствие его устойчивости. В точке А при
. Вывод из штопора (который в этом случае называется плоским) будет затруднённым, вследствие его устойчивости. В точке А при ![]() штопор будет крутым и вывод из этого режима проще, вследствие его неустойчивости. Когда ВС попадает в первый режим установившегося вращения
штопор будет крутым и вывод из этого режима проще, вследствие его неустойчивости. Когда ВС попадает в первый режим установившегося вращения ![]() , изменение угла установки стабилизатора (руля высоты) с отрицательных на положительные значения (пикирование -
, изменение угла установки стабилизатора (руля высоты) с отрицательных на положительные значения (пикирование -![]() >0) приводит не к уменьшению угла атаки, а наоборот к его увеличению с
>0) приводит не к уменьшению угла атаки, а наоборот к его увеличению с ![]() до
до ![]() .
.
Отклонение элеронов из-за неудовлетворительных характеристик поперечной управляемости также не предотвращает авторотацию ВС. Наиболее эффективным способом борьбы с авторотацией является создание «внутреннего скольжения» путем отклонения руля направления (см. рис. 40).
В установившемся штопоре на закритическом ![]() полная аэродинамическая сила
полная аэродинамическая сила ![]() (при малых
(при малых ![]() и малых
и малых ![]() ) лежит в плоскости симметрии ВС и перпендикулярна продольной оси ОХ, т. е.
) лежит в плоскости симметрии ВС и перпендикулярна продольной оси ОХ, т. е. ![]() и из равенства сил на вертикаль получаем
и из равенства сил на вертикаль получаем
![]() .
.
Отсюда
 ;
;
Радиус штопора ![]() находим из уравнения
находим из уравнения
![]()
Откуда ![]() ,
,
или ![]() ;
; ![]() .
.
Время полета и потеря высоты за виток составляют
![]() ;
;

Движение ВС в штопоре является одним из самых сложных и приведенные формулы являются очень приближенными. Для получения более точных характеристик штопора необходимо проводить математические моделирования на основе полной модели пространственного движения на ЭВМ.
Лекция 12. 8. Системы управления ВС
Это сложный комплекс электронно-вычислительных, гидравлических и механических устройств, в совокупности обеспечивающих необходимые характеристики устойчивости и управляемости ВС, стабилизацию установленных пилотом режимов полёта, программное автоматическое управление ВС на всех режимах полета от взлета до посадки. Здесь мы остановимся главным образом на электродистанционных системах управления (СДУ) с использованием необратимого бустерного управления (НБУ) без резервной механической системы. Внедрение СДУ позволило достаточно просто ввести активные системы управления, к которым относятся: снижения маневренных нагрузок на конструкцию ВС;
непосредственное управление подъемной и боковой силами; ослабление воздействия турбулентности атмосферы; демпфирование упругих колебаний конструкции.
Рассмотрим комплекс всех систем управления ВС
Он представлен в виде структурной упрощенной схемы:
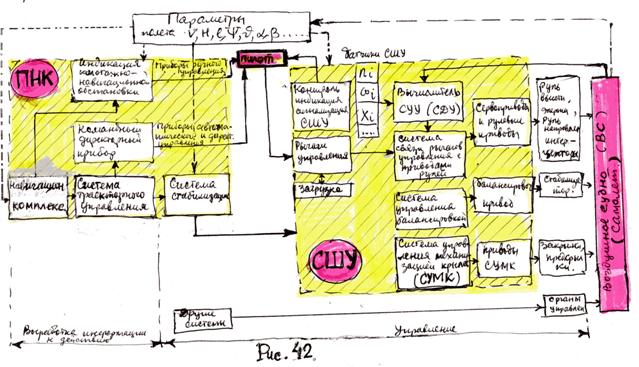
1) СШУ – система штурвального управления это совокупность всех устройств, решающих задачи улучшения пилотажных и летных характеристик ВС и работающих параллельно с пилотом при ручном управлении полетом;
2) ПНК – пилотажно-навигационный комплекс – совокупность автоматических управляющих устройств, измерителей и приборов, с помощью которых на борту создаётся информационная модель полёта, и решаются задачи стабилизации и управления траекторией для разгрузки пилота и повышения эффективности использования ВС.
Перечислим основные задачи, которые решает система автоматического управления (САУ) с целью облегчения пилотирования и повышения безопасности полета ( реализованы на Ту-204, ИЛ-96-300, В-747, А-300В, L-1011):
- стабилизация угла тангажа; - стабилизация числа М;
- стабилизация угла крена; - координированный разворот;
- выбор курса; - полет в турбулентной атмосфере;
- захват высоты; - взлет;
- стабилизация высоты; - заход и посадка по категории III ИКАО;
- управление вертикальной скоростью; - уход на второй круг;
- стабилизация вертикальной скорости; - режим совмещенного управления.
- стабилизация индикаторной скорости;
При автоматическом управлении роль пилота сводится к осуществлению функций контроля, набора автоматических режимов и осуществлению в случае необходимости корректирующих действий в режиме САУ. В ряде случаев с целью обеспечения простого перехода с режима САУ на ручное управление и обратно предусматривается режим совмещенного управления, который включается путем приложения усилий (выше «пороговых») к обычным рычагам управления ВС.
Рассмотренный комплекс систем управления представляет собой типичную большую систему, как совокупность подсистем, объединенных общей целью функционирования. Ее особенности следующие:
1) системное построение, связанное с выделением функционально законченных подсистем;
2) ярко выраженная иерархическая структура, определяющая порядок подчинения и соединения (связей) между подсистемами;
3) избыточность информации в результате высокой насыщенности измерительными средствами, основанными на различных физических принципах;
4) функциональная избыточность за счет систем различного уровня сложности и точности, а также полуавтоматического пилотирования по командным (директорным ) приборам;
5) многоканальное управление отдельными режимами.
Схема, приведенная на рис. 43 показывает иерархическую структуру и уровни управления комплекса всех систем. В соответствии с иерархическим принципом, системы нижестоящего уровня функционируют по командам, исходящим из систем вышестоящего уровня.
Высшим звеном иерархии является пилот. Он включает системы уровня III при автоматическом управлении полетом, вырабатывает логику включения и задает режимы стабилизации систем уровня II, осуществляет контроль, управляет ВС по приборам.
Обмен информацией внутри систем комплекса совершается с помощью электрических сигналов. Звеном преобразования электрических в механические перемещения органов управления являются сервоприводы и группа приборов. Вмешательство пилота в работу систем автоматического управления производится посредством задающих устройств, преобразующих механические воздействия в электрические сигналы.
Наряду с разделением систем по функциональным иерархическим уровням («рассечение по вертикали»), системы разделяются и по их принадлежностям к тому или иному каналу управления, например, канал руля высоты, элеронов, руля направления, двигателя («рассечение по горизонтали»). Каждый из каналов управления также является самостоятельным функциональным образованием (объединением систем).
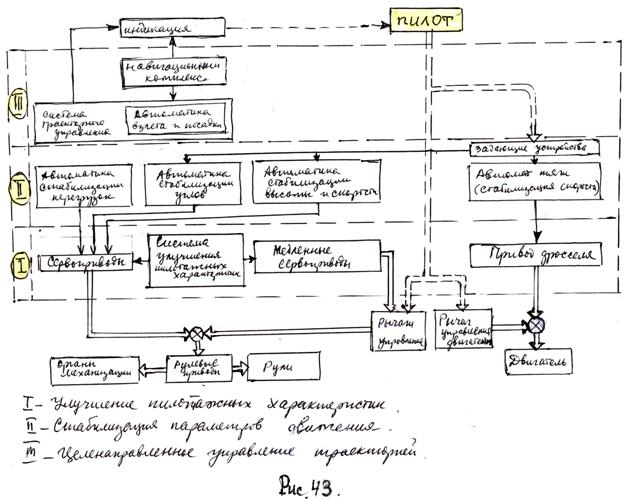
В соответствии с иерархическим принципом, системы нижестоящего уровня функционируют по командам, исходящим из систем вышестоящего уровня.
Компоновка СШУ, структура и параметры ее контуров непосредственно зависят от аэродинамической компоновки ВС, ее аэродинамических и конструктивных характеристик.
Для современных комплексов систем управления характерна функциональная избыточность, проявляющаяся в том, что управление ВС может осуществляться несколькими способами. Этих способов четыре.
Лекция 13.
1. Автоматическое управление траекторией
Все общие режимы полета, за исключением взлета и посадки, программируются в вычислителе навигационного комплекса. С момента включения автоматики, управление движением ВС производится по отклонениям от программы полета, определяемым в навигационном комплексе. Система траекторного управления вырабатывает на основе этих отклонений команды в системе уровня II в виде заданных значений углов тангажа, крена, курса (или перегрузок) и заданного режима работы двигателя. Эти команды отрабатываются системами стабилизации путем соответствующих воздействий на рули и рычаг управления двигателем, осуществляемых с помощью приводов. По такой же схеме происходит управление и в режимах автоматического взлета и посадки. Только здесь все функции управления возлагаются на автоматику взлета и посадки. При автоматическом управлении полетом пилот выполняет функции включения тех или иных систем и общего контроля за ходом выполнения операции.
2. Управление траекторным движением по командному прибору
Управление пилотом производится вручную – посредством воздействия на рычаги управления и сектор газа. Стратегия управления траекторным движением вырабатывается при этом системами уровня III. Так же, как и в рассмотренном выше способе управления, требуемую условную ориентацию ВС определяют здесь системы целенаправленного управления траекторией. Однако, приведение ВС в заданное угловое положение (отработку заданных углов тангажа и крена или перегрузки и крена) теперь осуществляет пилот, а не системы автоматической стабилизации. Требуемое управление производится с помощью командного прибора системы индикации. На стрелки командного прибора подаются сигналы рассогласования, и в задачу пилота входит обнуление этих сигналов путем соответствующего перемещения рычагов управления. Решение задачи стабилизации вручную пилотом облегчается функционированием СШУ, в частности СУУ, а при необходимости обеспечения устойчивости по скорости может включиться автомат тяги.
3. Автоматическая стабилизация параметров движения
При этом способе пилотирования стратегия управления траекторией центра масс (ЦМ) ВС вырабатывается пилотом. Ориентируясь по пилотажно-навигационным (не командным) приборам систем индикации, пилот сообразно обстановке и этапу полета вызывает тот или иной из режимов стабилизации, выполняемых системами уровня II и автоматом тяги. Управление ВС по намеченной пилотом логике производится посредством его манипуляций с задающими устройствами (рукояткой, задатчиком автомата тяги, кнопкой вызова режимов и т. д.). Автоматика функционирует в составе систем уровней I и II.
В течение полета приходится неоднократно переходить от режима автоматического управления к штурвальному и наоборот. Эти «переходы» требуют адаптации пилота. С целью упрощения пилотирования иногда совмещают различные виды управления. Такая возможность может использоваться на переходных фазах управления и для исправления работы САУ с помощью СШУ. Такой тип управления, при котором пилот управляет рычагами управления совместно с работой САУ, получил название «совмещенное управление».
4. Полуавтоматическое управление по пилотажно-навигационным приборам или земным ориентирам
При этом способе управления автоматика выполняет функции только улучшения пилотажных характеристик ВС (системы уровня I), а пилот управляет ВС с помощью СШУ, решая все задачи управления полетом. Автоматика выполняет при этом только функцию улучшения пилотажных характеристик ВС (системы уровня I).
8.1.Улучшение пилотажных характеристик в продольном движении
Улучшение пилотажных характеристик осуществляется автоматами продольного управления, путевой устойчивости и их составными частями: демпферами тангажа, крена и рыскания. Системы автоматического управления носят многоконтурный характер с различными перекрестными связями и с целью упрощения исследований обычно рассматриваются сначала раздельно. Рассмотрим приближенный анализ работы демпфера тангажа в изолированном продольном движении.
Лекция 14. 8.1.1. Демпфер тангажа
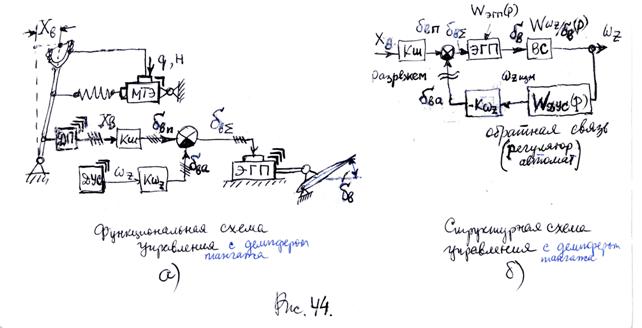
Работа демпфера тангажа с электродистанционным управлением (ЭДУ) может быть представлена схемой (см. рис.44). Здесь обозначены: МТЭ – механизм триммерного эффекта; ДП – датчик перемещений штурвала;  - передаточный коэффициент в системе продольного управления;
- передаточный коэффициент в системе продольного управления; ![]() - составляющая отклонения (стабилизатора) руля высоты, обусловленная отклонением штурвала пилотом; ДУС – датчик угловой скорости тангажа
- составляющая отклонения (стабилизатора) руля высоты, обусловленная отклонением штурвала пилотом; ДУС – датчик угловой скорости тангажа ![]() ;
;
![]() - коэффициент усиления в законе управления демпфера тангажа (автомата)
- коэффициент усиления в законе управления демпфера тангажа (автомата)
![]() =
=![]()
![]() ;
; ![]() =
=![]() -
-![]() ; фактически
; фактически ![]() - является передаточным коэффициентом демпфера и
- является передаточным коэффициентом демпфера и![]() >0 для ВС нормальной схемы; ЭГП – электрогидравлический привод, объединяющий функции сервопривода (преобразователя электрических сигналов в механическое перемещение) и рулевого привода (непосредственно воспринимающего усилия от шарнирных моментов); наклонными черточками и уголками изображены степени резервирования конструктивных элементов САУ и электрических связей с целью повышения безопасности их функционирования, принимая во внимание, что в цифровых каналах управления степень резервирования обычно выше чем в аналоговых каналах; математической моделью движения ВС является передаточная функция (см.(5.24))
>0 для ВС нормальной схемы; ЭГП – электрогидравлический привод, объединяющий функции сервопривода (преобразователя электрических сигналов в механическое перемещение) и рулевого привода (непосредственно воспринимающего усилия от шарнирных моментов); наклонными черточками и уголками изображены степени резервирования конструктивных элементов САУ и электрических связей с целью повышения безопасности их функционирования, принимая во внимание, что в цифровых каналах управления степень резервирования обычно выше чем в аналоговых каналах; математической моделью движения ВС является передаточная функция (см.(5.24))
 ;
;![]() - соединение (сумматор) с заштрихованной частью означает, что обратная cвязь отрицательная; W
- соединение (сумматор) с заштрихованной частью означает, что обратная cвязь отрицательная; W![]() (p) - описывает динамику гироскопического датчика угловой скорости (ДУС), т. е. связь измеренных значений с истинными; ЭГП – представляется своей передаточной функцией
(p) - описывает динамику гироскопического датчика угловой скорости (ДУС), т. е. связь измеренных значений с истинными; ЭГП – представляется своей передаточной функцией ![]() , на вход которого подается сигнал
, на вход которого подается сигнал![]() , а на выходе линейное перемещение штока, управляющее стабилизатором, с целью создания потребного угла отклонения руля высоты
, а на выходе линейное перемещение штока, управляющее стабилизатором, с целью создания потребного угла отклонения руля высоты![]() .
.
При отклонении руля высоты выходная величина ![]() (p) связана с
(p) связана с ![]() (p) соотношением
(p) соотношением  , а
, а ![]() (p) связана с
(p) связана с ![]() (p) с помощью передаточной функции
(p) с помощью передаточной функции  , т. е.
, т. е.  в результате для последовательного соединения двух звеньев (ЭГП и ВС) имеем
в результате для последовательного соединения двух звеньев (ЭГП и ВС) имеем
![]() или
или
![]() (8.1)
(8.1)
Обозначим W![]() (p) передаточную функцию «объекта» без автомата W
(p) передаточную функцию «объекта» без автомата W![]() (p)=
(p)=![]() (p)/
(p)/![]() и
и
W![]() (p) =
(p) =![]() (p)/
(p)/![]() (p) - передаточную функцию регулятора W
(p) - передаточную функцию регулятора W![]() (p) =
(p) =![]() (p)/
(p)/![]() (p)
(p)
![]() .
.
Пусть разрезана обратная связь (как указано на рис. 44.б) и
![]() (p)=
(p)=![]() (p)-
(p)-![]() (p);
(p);
![]() (p)/W
(p)/W![]() (p)=
(p)=![]() (p)-
(p)-![]() (p);
(p);
![]() (p)/W
(p)/W (p) =
(p) =![]() (p)-W
(p)-W![]() (p)
(p)![]() (p).
(p).
Откуда
![]()
![]() (p).
(p).
В результате получаем выражение для передаточной функции замкнутой системы  в зависимости от передаточной функции объекта
в зависимости от передаточной функции объекта ![]() и передаточной функции регулятора с отрицательной обратной связью
и передаточной функции регулятора с отрицательной обратной связью ![]()
![]() . (8.2)
. (8.2)
В частности при отсутствии регулятора (![]() =1) и наличии только одной отрицательной обратной связи
=1) и наличии только одной отрицательной обратной связи ![]() соответствует передаточная функция разомкнутой системы
соответствует передаточная функция разомкнутой системы ![]() ;
;![]() ≡
≡ ![]() и связь между замкнутой и разомкнутой системами выражается следующей зависимостью
и связь между замкнутой и разомкнутой системами выражается следующей зависимостью

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
