

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() =
= . (8.3)
. (8.3)
Анализ устойчивости замкнутой системы, так же как и разомкнутой определяется характеристическим уравнением (см. раздел 5.3.2) для демпфера (на основании знамена
1+![]()
 =0 (8.4)
=0 (8.4)
Для динамической устойчивости движения ВС с демпфером при p=iω корни характеристического многочлена должны располагаться в левой полуплоскости, не находясь на оси ординат (корни не должны быть чисто мнимыми).
Здесь заметим, что в структурной схеме управления (рис.46.б) принято (-K ) в обратной связи, чтобы передаточная функция разомкнутой системы была положительной, учитывая что ![]() .
.
При отклонении руля высоты демпфером (при фиксированном штурвале) появится прирост коэффициента момента тангажа (индекс «изм» в дальнейшем будем опускать)
Δm![]() =
=![]() , (8.5)
, (8.5)
где ![]() =
= .
.
Так как ![]() >0,
>0, ![]() <0, то автомат увеличивает демпфирование продольного движения (уменьшает |
<0, то автомат увеличивает демпфирование продольного движения (уменьшает |![]() |). В результате при соответствующем выборе значения коэффициента
|). В результате при соответствующем выборе значения коэффициента ![]() в системе «ВС-демпфер» можно обеспечить требуемое изменение коэффициента демпфирования ξ (см. раздел 5.3.2) или степени устойчивости по перегрузке σ (см (2.26), (2.27)). Таким образом, демпфер является по существу простейшим автоматом, улучшающим устойчивость, но ухудшающим характеристики управляемости: X
в системе «ВС-демпфер» можно обеспечить требуемое изменение коэффициента демпфирования ξ (см. раздел 5.3.2) или степени устойчивости по перегрузке σ (см (2.26), (2.27)). Таким образом, демпфер является по существу простейшим автоматом, улучшающим устойчивость, но ухудшающим характеристики управляемости: X![]() , R.
, R.
Степень статической устойчивости по перегрузке с фиксированным штурвалом с учетом работы демпфера изменится на величину (принимая во внимание, что: ![]() =
= , см. раздел 2.5).
, см. раздел 2.5).
Δσ = (8.6)
(8.6)
Степень статической устойчивости по перегрузке ВС с фиксированным штурвалом (σnф) при включенном демпфере тангажа станет равной
σnф=σ![]() +σ
+σ![]() =σ
=σ![]() +
+ , (8.7)
, (8.7)
где σ![]() определяется по формуле (2.26) или (2.27).
определяется по формуле (2.26) или (2.27).
Лекция 15. 8.1.2. Автомат продольной устойчивости
С помощью демпфера тангажа можно благоприятно влиять на характеристики устойчивости ВС. Однако радикальное изменение этих характеристик (например, для статически неустойчивого ВС) с помощью только одной обратной связи по ![]() не представляется возможным. Эффективно влиять на характеристики устойчивости и управляемости ВС можно, если ввести дополнительно обратную связь по приращению перегрузки Δny, а также автоматически регулировать коэффициент передачи K
не представляется возможным. Эффективно влиять на характеристики устойчивости и управляемости ВС можно, если ввести дополнительно обратную связь по приращению перегрузки Δny, а также автоматически регулировать коэффициент передачи K![]() =
= ![]() .
.
Автоматы с такой структурой называются автоматами продольного управления (АПУ).
Пусть:
![]() , (8.8)
, (8.8)
где Δn![]() = n
= n![]() -1. Возможны и другие законы управления, например,
-1. Возможны и другие законы управления, например,
![]() , (8.9)
, (8.9)
который здесь рассматривается не будет. В (8.8) и (8.9) приняты обозначения
Δn![]() = Δ
= Δ![]() / и Δα=Δ
/ и Δα=Δ![]() /C ; K
/C ; K![]() , K
, K![]() , K - передаточные коэффициенты автоматов, положительные для ВС нормальной схемы (обычно n
, K - передаточные коэффициенты автоматов, положительные для ВС нормальной схемы (обычно n![]()
![]() n
n![]() ).
).
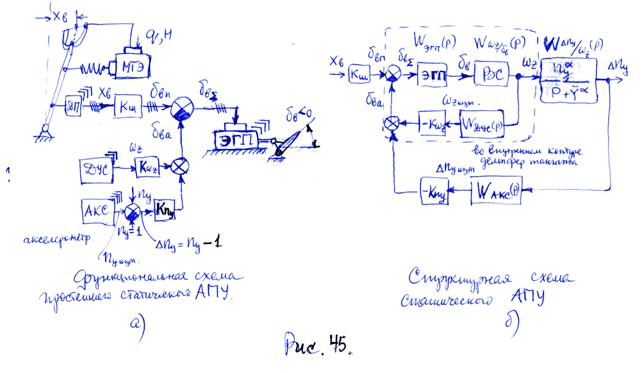
Рассмотрим функциональную и структурную схемы статического АПУ с законом управления (8.8).
Ставится задача определить K![]() и K
и K![]() , при которых «ВС + АПУ» будет обладать заданными динамическими характеристиками.
, при которых «ВС + АПУ» будет обладать заданными динамическими характеристиками.
При включении автомата, отклоняющего руль высоты по закону (8.8) возникает дополнительный момент тангажа, коэффициент которого равен (m![]() = m
= m![]() ).
).
Δm![]() = m
= m![]()
![]() =Δ m
=Δ m![]()
![]() + K
+ K![]() m
m![]()
![]() .
.
Степень статической устойчивости по перегрузке с фиксированным штурвалом изменится на величину
Δ = (8.10)
и тогда
σ = σ + Δ = σ + . (8.11)
Откуда видно, что при включенном АПУ степень устойчивости по перегрузке ВС с фиксированным штурвалом σ![]() будет больше чем при фиксированном руле высоты σ
будет больше чем при фиксированном руле высоты σ![]() (т. к.
(т. к. ![]() <0, остальные составляющие в выражении для Δ
<0, остальные составляющие в выражении для Δ![]() положительные).
положительные).
Исследование структурной схемы (рис.45 б) производится последовательно. Сначала анализируется внутренний контур (демпфер тангажа). Для него выведена формула (8.2) для передаточной функции замкнутой системы, которую можно получить после подстановки всех входящих в нее составляющих. В результате свертки внутреннего контура можно рассмотреть следующую эквивалентную структурную схему
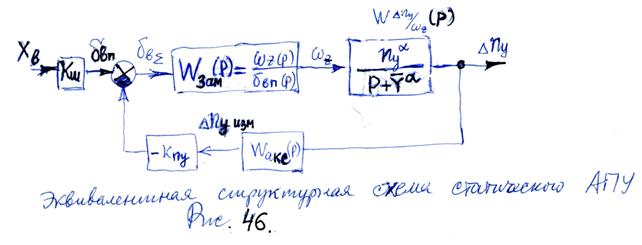
В которой производятся преобразования аналогичные предыдущему. Получим новую передаточную функцию замкнутой системы, с помощью которой выбираются
![]() и
и ![]() , обеспечивающие приемлемые характеристики устойчивости и управляемости.
, обеспечивающие приемлемые характеристики устойчивости и управляемости.
Однако так же как и при использовании только демпфера для выхода ВС на заданную перегрузку необходимы большие расходы штурвала и следовательно возрастают усилия, которые испытывает пилот (с обратимой системой управления). Чтобы улучшить характеристики управляемости (при приемлемых показателях устойчивости) в закон управления включаются дополнительные составляющие
δ![]() = K
= K![]() x
x![]() +
+![]() Δn
Δn![]() +
+![]()
![]() Δn. (8.12)
Δn. (8.12)
Требуемое изменение показателя x можно осуществить путем соответствующего регулирования коэффициента K![]() . Простейшим устройством, выполняющим эту функцию, является автомат регулировки управления (АРУ).
. Простейшим устройством, выполняющим эту функцию, является автомат регулировки управления (АРУ).
Лекция 16. 8.2. Автоматическое управление
В режиме автоматического управления управляющей системой является автоматика уровней II или III (см. рис.43). Процесс управления осуществляется по замкнутому контуру, в котором ВС можно рассматривать как звено системы управления. Укрупнено САУ можно представить в виде схемы (рис.47).
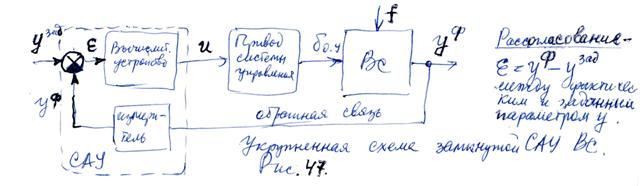
По рассогласованию![]() вычислительное устройство САУ в соответствии с заложенном в нем законом управления вырабатывает сигнал управления u(t).Сигнал управления поступает в исполнительный элемент САУ, а затем на рулевой привод, который отклоняет соответствующий орган управления
вычислительное устройство САУ в соответствии с заложенном в нем законом управления вырабатывает сигнал управления u(t).Сигнал управления поступает в исполнительный элемент САУ, а затем на рулевой привод, который отклоняет соответствующий орган управления ![]() для устранения рассогласования.
для устранения рассогласования.
Замкнутая система «ВС + САУ» должна быть устойчивой и обеспечивать требуемую точность и быстродействие с высокой надежностью и безопасностью работы.
При одновременном управлении несколькими параметрами движения ВС, САУ имеет несколько взаимосвязанных замкнутых контуров управления. Такие системы называются многосвязными или многоконтурными.
Уровни надежности работы САУ, СУУ и др. применяются различные. Для ВС с АРУ с автоматами демпфирования и устойчивости требования к показателям устойчивости и управляемости относятся к системе «ВС + СУУ» и должна обеспечиваться практическая безотказность. Если практическая безотказность не обеспечена, то даже при наличии автоматики изолированное ВС должно иметь удовлетворительные характеристики, чтобы отказ автоматически не привел к опасной ситуации, т. е. автоматы должны быть отказобезопасными.
Приложение I
Категории посадочных минимумов ИКАО (ICAO).
Категория | Минимальная высота видимости, м | Горизонтальная видимость на ВПП, м |
1 | 60 | 800 |
2 | 30 | 400 |
3а | 0 | 200 |
3в | 0 | 50 |
3с | 0 | 0 |
Оценки пилотом технических показателей совершенства ВС.
5-ти бальная оценка R* (РФ) | 5 | 4 | 3 | 2 | 1 | |||||
10-ти бальная оценка (США) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
Уровень пилотажных характеристик | 1-ый уровень | 2-ой уровень | 3-ий уровень | |||||||
Требования к летно-техническим характеристика (ЛТХ) ВС
Класс I – маневренные (n![]() ≥ 5);
≥ 5);
Класс II – ограниченно-маневренные (3,5 ≤ n![]() < 5);
< 5);
Класс III – неманевренные (n![]() < 3,5); а) взлетная масса менее100 т; б) взлетная масса более 100т.
< 3,5); а) взлетная масса менее100 т; б) взлетная масса более 100т.
Для ВС класса III ТТЗ содержит требования к следующим ЛТХ:
1. скорости крейсерского полета в заданном диапазоне высот;
2. дальность при максимально полезной или коммерческой нагрузке в режиме полета с максимальной и крейсерской скоростями.
3. дальность с уменьшенной полезной или коммерческой нагрузкой при максимальной взлетной массе, а также при максимальном запасе топлива.
4. взлетно-посадочные характеристики.
Требования к пилотажным характеристикам ВС.
В зависимости от целевых задач ВС и характера выполняемого задания все этапы полета подразделяют на категории А. Б.В.
Категория А – соответствует этапам полета, требующим точного слежения и быстрого маневрирования.
Категория Б – соответствует взлетно-посадочным режимам полета с точным управлением траекторией, но не требующим высокого быстродействия.
Категория В - соответствует этапам полета, не требующим быстрого маневрирования и точного слежения (набор высоты, крейсерский полет, снижение).
Устойчивость и управляемость ВС на различных этапах полета определяется тремя уровнями пилотажных характеристик.
Первый уровень – наиболее благоприятные характеристики, не требующие большой нагрузки пилота и хорошо согласующиеся с задачами полета.
Второй уровень – удовлетворительные характеристики, обеспечивающие выполнение задач этапа полета при некотором снижении эффективности и увеличении нагрузки на пилота.
Третий уровень – неудовлетворительные, неприемлемые характеристики, не обеспечивающие эффективного выполнения задач этапа полета из-за большой нагрузки на пилота при управлении ВС.
Для количественной оценки указанных уровней пилотажных характеристик используются требования соответствующих нормативных документов и специализированные шкалы типа шкалы Купера – Харпера. В этой шкале первый уровень характеристик соответствует следующим оценкам:
1 ≤ PR ≤ 3,5 (хор.); второй уровень – 3,5<PR<6,5 (удовл.); третий уровень – PR>6,5 (неудовл.).

При формировании требований различают два вида пилотажных характеристик: статические и динамические. Важнейшими статическими характеристиками продольной управляемости являются 1) Х![]()
![]() ; 2) Р
; 2) Р![]()
![]() ; 3) Х
; 3) Х![]() , мм; Х
, мм; Х![]() =
= ![]() Требования к значениям этих характеристик зависят от класса самолета и задаются нормативными документами.
Требования к значениям этих характеристик зависят от класса самолета и задаются нормативными документами.
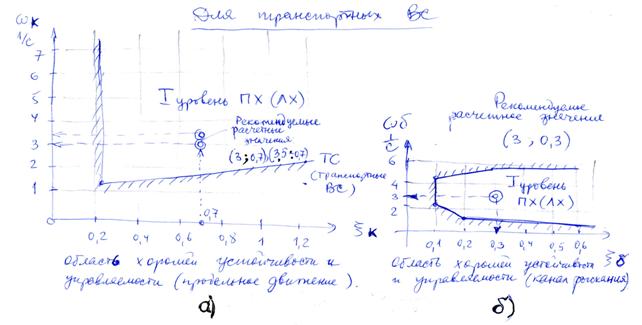
Для транспортных ВС (класс III, неманевренные, n![]() <3.5; а) взлетная масса менее 100 т; б) взлетная масса более 100 т; имеем следующие нормативы
<3.5; а) взлетная масса менее 100 т; б) взлетная масса более 100 т; имеем следующие нормативы
Характеристика | Класс ВС | |
III а | III б | |
Х | (-30) | (-45) |
Р | (-100)-(-300) | (-150)-(-450) |
Х | >0 | >0 |
При этом максимальное значение коэффициента перемещения штурвала на единицу перегрузки должно быть |Х![]() |
|![]() |3Х
|3Х![]() |.
|.
Одной из основных статических характеристик боковой управляемости является требование минимальной угловой скорости крена ![]() , рад/с.
, рад/с.
Угловая скорость крена | Уровень характеристик | Категории этапа полета | Класс ВС | |
III а | III б | |||
рад/с | 1-ый | А | 0,35 | 0,3 |
Б | 0,3 | 0,25 | ||
В | 0,25 | 0,2 | ||
2-ой | А | 0,2 | 0,2 | |
Б | 0,15 | 0,15 | ||
В | 0,15 | 0,15 |
Основные требования к динамическим характеристикам устойчивости и управляемости задаются несколькими способами:
1. Нормирование переходных процессов (прямые показатели качества);
2. Нормированием расположением нулей и полюсов передаточных функций ВС;
3. Нормированием частотных характеристик.
Время затухания | Категория этапа полета | Класс ВС III |
| А | 10 |
Б, В | 15 |
Нормирование расположения нулей и полюсов передаточных функций ВС производится для продольного и изолированных движений рыскания определяются допустимыми областями изменения параметров в короткопериодических движениях: опорных частот недемпфированных колебаний ![]() и относительного коэффициента демпфирования ξ
и относительного коэффициента демпфирования ξ![]() (рис.48а) и аналогично:
(рис.48а) и аналогично: ![]() и ξ
и ξ![]() , (рис.48б).
, (рис.48б).
Требования к динамическим характеристикам изолированного движения крена определяются допустимыми областями изменения параметров в угловом движении крена: и постоянной времени апериодического звена Т![]() , (рис.48 в).
, (рис.48 в).
Что касается нормирования частотных характеристик, то для этой цели используют частотные критерии устойчивости Михайлова и Найквиста.
Приложение II.
Частотные критерии устойчивости и нормирование запасов устойчивости.
Пусть для линейной стационарной системы вход Х(t) и выход У(t) связаны соотношением
y(t) = 
где W(t-τ) и W(τ) – называются переходными функциями, связывающими между собой выход У(t), как реакцию системы на единичное входное воздействие Х(τ)=1(τ) в момент
τ <t.
Преобразование Фурье от левой и правой частей
приводит к соотношению
Y(iω) = W(iω)X(iω),
где Y(iω),W(iω) и X(iω) - частотные характеристики соответственно «выхода», переходной функции W(τ) и «входа».
Если теперь рассмотреть преобразование Лапласа входа и выхода (при нулевых начальных условиях), то
Y(p) = W(p)X(p),
где W(р) – передаточная функция.
Сравнивая два последних соотношения нетрудно заключить, что если в последнем соотношении положить p= iω, то
W(iω) = W(p)|
и частотную характеристику переходной функции W(τ) можно получить, если в передаточной функции W(р) положить р=iω.
Будем в дальнейшем W(iω) называть частотной характеристикой исходной системы. Для передаточных функций систем (4.22), (8.3), (8.2)
W![]() (p) = Y(p)/X(p); W
(p) = Y(p)/X(p); W![]() (p) = W
(p) = W![]() (p)/(1 + W
(p)/(1 + W![]() (p)); W
(p)); W![]() (p) = W
(p) = W (p)/(1 + W(p)W
(p)/(1 + W(p)W![]() (p))
(p))
устойчивость определяется по корням знаменателя этих передаточных функций, представляющих собой характеристические уравнения соответственно для разомкнутой системы (4.22), замкнутой системы через единичную отрицательную обратную связь (8.3) и замкнутую систему с регулятором в отрицательной обратной связи (8.2).
Положив в этих соотношениях р = iω, получим соответствующие частотные характеристики.
Рассмотрим один простейший вариант замкнутой системы и ее частотную характеристику
W![]() (iω) = W
(iω) = W![]() (iω)/(1 + W
(iω)/(1 + W![]() (iω)).
(iω)).
Знаменатель частотной характеристики является комплексным числом и при изменении ω от 0 до +∞ описывает кривую на комплексной плоскости, называемую годографом Найквиста (или просто годографом). Условие для определения корней характеристического уравнения будет следующим 1+ W![]() (iω) = 0, а для устойчивых систем должно быть
(iω) = 0, а для устойчивых систем должно быть
1+ W![]() (iω) > 0
(iω) > 0
или W![]() (iω) >-1. Отсюда следует частотный критерий Найквиста устойчивости систем:
(iω) >-1. Отсюда следует частотный критерий Найквиста устойчивости систем:
Если частотная характеристика разомкнутой системы W![]() (iω) при 0 ≤ ω < ∞
(iω) при 0 ≤ ω < ∞
не охватывает точку (-1,io), то система замкнутая с помощью отрицательной обратной связи будет устойчива.
На практике обычно удобнее использовать определение (назначение) запасов устойчивости по логарифмическим амплитудным (ЛАХ) и фазовым частотным (ФЧХ) характеристикам А(ω) и γ(ω). Вводятся специальные логарифмические шкалы:
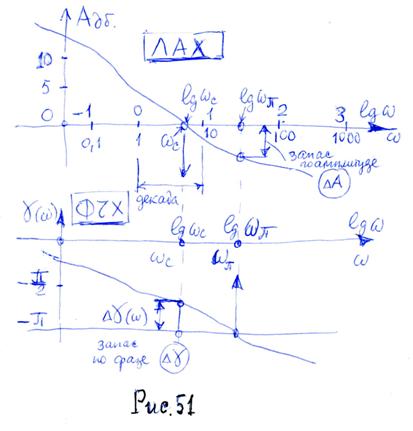
20lgА(ω)=А дб (в децибелах) Например: А=100 1/вольт. с, то Адб=20lg100=40 дб. и по частоте lg ω, При этом: ω![]() = 2ω
= 2ω![]() - октава; ω
- октава; ω![]() = 10 ω
= 10 ω![]() - декада. При частоте ω = ω
- декада. При частоте ω = ω![]() запаздывание по фазе γ = - π = -180◦, а при ω = ω
запаздывание по фазе γ = - π = -180◦, а при ω = ω![]() частоте среза – амплитуда становится нулевой. Наклон зависимости ЛАХ определяется обычно в дб/декаду и особенно важен в области частоты среза ω = ω
частоте среза – амплитуда становится нулевой. Наклон зависимости ЛАХ определяется обычно в дб/декаду и особенно важен в области частоты среза ω = ω![]() .
.
Для приемлемых характеристик устойчивости и управляемости обычно принимается
ΔА= дб, Δφ = 40 – 450 и наклон ЛАХ в окрестности ω![]() равный ( - 20дб/дек).
равный ( - 20дб/дек).
Литература
Основная
Аэромеханика самолета./Под ред. и /- М.: Машиностроение.1985.-360с.
Дополнительная
1. , , . Расчет основных характеристик динамики и управления самолета. - М.: МАИ.1996.-65с.
2. Аэродинамика и динамика полета магистральных самолетов. /Под ред. /
-М.: Издательский отдел ЦАГИ, Авиа - издательство КНР. 1995.-771с.
Вопросы к коллоквиуму по курсу «Устойчивость и управляемость транспортных воздушных судов»
1. В чем состоит отличие понятий статическая и динамическая устойчивость?
2. Будет ли движение устойчивым по Ляпунову, если возмущенная траектория выходит за ![]() -окрестность?
-окрестность?
3. Почему для статически устойчивого ВС по перегрузке происходит «потеря на блансировку»?
4. Будет ли возникать демпфирующий момент ![]() от вращения только изолированного крыла?
от вращения только изолированного крыла?
5. Объяснить на зависимости ![]() статическую устойчивость по
статическую устойчивость по ![]() .
.
6. Пусть при ударе ракеткой по волану движение происходит тяжелой частью вперед.
Объяснить его устойчивое движение с позиции статической устойчивости.
7. Объяснить причины статической неустойчивости при движении самолета в диапазоне
чисел М от 0,7 до 1,2.
8. Что называется балансировкой ВС при свободном штурвале?
9. Каким образом можно исправить балансировочную зависимость![]() в случае неустойчивости по скорости?
в случае неустойчивости по скорости?
10. Какие особенности балансировки на взлете и посадке?
11. Какие режимы являются альтернативными при выборе предельно передней центровки?
12. Объяснить возникновение моментов ![]() и
и ![]() .
.
13. Объяснить возникновение момент ![]()
14. Какие характеристики поперечной и путевой статической управляемости?
15. Какие допущения используются при исследовании устойчивости по Ляпунову?
16. Как доказать, что в случае чисто мнимых корней характеристического уравнения
устойчивость по Ляпунову проверить невозможно?
17. Почему условиями апериодической и колебательной устойчивости являются соот-
ветственно следующие![]() ? (Критерий Рауса - Гурвица)
? (Критерий Рауса - Гурвица)
18. Перечислите виды устойчивости.
19. Доказать, что частотную характеристику можно получить, если в передаточной функции положить ![]() (собственное возмущенное движение отсутствует) для заданных входных и выходных сигналов:
(собственное возмущенное движение отсутствует) для заданных входных и выходных сигналов:
(вход)![]() и его изображение по Лапласу:
и его изображение по Лапласу:![]()
(выход) и его изображение по Лапласу:
и его изображение по Лапласу:![]() .
.
20. Объяснить по диаграмме потребных и располагаемых тяг особенности статической
устойчивости по скорости на малых скоростях.
21. Почему с увеличением ![]() ,
, ![]() уменьшается, а
уменьшается, а ![]() увеличивается?
увеличивается?
22. Объяснить поперечную статическую устойчивость при ![]() .
.
23. Объяснить путевую (флюгерную) статическую устойчивость при ![]() .
.
24. Когда возникает реверс элеронов?
25. Может ли ВС, статически устойчивое по перегрузке, быть статически неусточивым по скорости?
26. Почему при двигателях на пилонах под крыльями происходит смещение фокуса ВС по углу атаки?
27. Какие дополнительные моменты тангажа возникают от криволинейного неустановившегося движения ВС в вертикальной плоскости по сравнению со случаем горизонтального полета?
28. Какими средствами можно создать потребные усилия и перемещения на органах управления?
29. Что означает прямая реакция ВС по крену на действия рулем направления?
30. Как изменится положение фокуса ВС по![]() , если увеличить площадь заднего Г. О.?
, если увеличить площадь заднего Г. О.?
31. Каково назначение коэффициентов передачи и жесткости загрузочного механизма в
системе продольного управления?
32. Как создаются условия «свободного штурвала»?
33. Как изменятся зависимости ![]() и
и ![]() при
при ![]() если заданы
если заданы![]() и
и ![]() при
при ![]() ?
?
34. Каковы физические причины изменения зависимости  ?
?
35. Почему при вращении на опускающемся полукрыле всегда увеличивается угол атаки?

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
