
1. Номер НКА относится к номеру космического аппарата. Номер PRN относится к уникальному псевдошумовому коду спутника.
2. Часы Rb –рубидиевые, Cs – цезиевые. Единственные изменения в часах были сделаны со времени опубликования этого Альманаха в августе 2003 г. включено в примечание о работе.
3. Даты запуска и начала использования основаны на всемирном времени.
4. Текущее созвездие GPS состоит из 20 спутников Блока II/IIA и 8 спутников Блока IIR и находится в полных операционных условиях (FOC).
5. Спутники № 35 и 36 имеют на борту уголковые отражатели для лазерной локации, что позволяет обработчикам делать различие между ошибками бортовых часов и ошибками эфемерид спутника при слежении за GPS.
6. Режим селективного доступа (SA) был установлен на ноль по всем спутникам по указу президента со 2 мая 2000 г. примерно с 4 часов по всемирному времени.
7. Режим Anti-Spoofing был введен с 31 января 1994 г. по спутникам всех Блоков II. Режим AS иногда отключается для тестирования и других целей.
8. Псевдослучайный код спутника 32 был изменен с 32 наянваря 1993 г.
Примечания к таблице:
A. Спутник SVN 23 (PRN 23) был установлен в неиспользуемое состояние 13 ноября 2003 г. Его рабочие часы были переключены с цезиевых на рубидиевые.
В. Спутник SVN 22 был в нерабочем состоянии с 3 декабря 2002 г., несмотря на несколько попыток переключить часы. Спутник был окончательно выведен из эксплуатации с 6 августа 2003 г.
С. Спутник SVN 35 (PRN 05) не использовался с 26 сентября по 14 октября 2003 г. С 8 октября 2003 г. часы спутника были переключены с рубидиевых на цезиевые.
22 февраля 2004 г. 17:04 UTC

Рис. 5.3. Схема расположения спутников GPS на орбитальных плоскостях.
Орбитальные параметры. В настоящее время наклонение орбит всех спутников GPS равно 55°, хотя у спутников Блока I оно было выбрано 63°. Эксцентриситеты орбит находятся в пределах 0.001 ¸ 0.02, то-есть практически круговые. Большая высота над поверхностью Земли – 20150 км, - сводит до минимума влияние трудно прогнозируемого сопротивления атмосферы и допускает при расчете эфемерид использовать более простые модели гравитационного поля Земли, чем для низкоорбитных спутников. Большая высота над поверхностью Земли обеспечивает также большие размеры зоны видимости как с Земли, так и со спутника (табл. 5.3). Продолжительность пребывания одного спутника в зоне видимости при его зенитном прохождении и при углах отсечки по высоте hmin= 15° равна примерно 4 часам.
Таблица 5.3. Параметры движения спутников GPS.
Параметр | Значение |
Большая полуось орбиты, a | 26560 км |
Наклонение орбиты i | 55° * |
Средняя высота над земной поверхностью, Н=a-R | 20182 км |
Среднее движение | 30°/час |
Период обращения, Р=2p/n | 11:57:58 |
Скорость полета по орбите | 3.874 км/с |
Сферический радиус зоны видимости со спутника при hmin=15° | 13.4° |
Сферический радиус зоны видимости b со станции при hmin=15° | 61.6° |
Максимальное пребывание в зоне видимости при hmin=15° (Dt=2b/n) | 4.1 часа |
Прецессия орбиты за сутки dW=3pС20cosi(aЕ /а)2N ** | -0.0386° |
* У спутников Блока I наклонение было 63°.
** N - число витков за сутки, аЕ – экваториальный радиус Земли, С20 – коэффициент второй зональной гармоники разложения геопотенциала в ряд по сферическим функциям, а – большая полуось орбиты.
Для определения сферического радиуса зоны видимости со станции используется формула (рис. 5.3):
![]() , (5.1)
, (5.1)
где R – радиус Земли, а – радиус (большая полуось) орбиты, а hmin – высота спутника над горизонтом, с которой начинаются наблюдения. В спутниковых технологиях ее обычно называют маской высоты или углом отсечки по высоте. Величина угла b и среднее движение спутника n определяют продолжительность Dt пребывания спутника в зоне видимости. В случае зенитного прохождения спутника
![]() . (5.2)
. (5.2)
Рис. 5.4. Зона видимости с пункта. Рис. 5.5. Зона видимости со спутника.
Угол z, который определяет сферический радиус наблюдаемой со спутника части земной поверхности называют зоной видимости со спутника. Для его определения используется формула:
![]() . (5.3)
. (5.3)
Прецессия орбиты для спутников GPS за сутки, вычисляемая по формуле:
dW=3pС20cosi(aЕ /а)2N (5.4)
равна -0.0386°, а период дрейфа орбиты (период, за который линия узлов в пространстве поворачивается на 360°)
![]() (5.5)
(5.5)
составляет около 9300 суток или 25 лет. Изменение географической долготы восходящего узла за сутки определяет смещение трассы спутника на земной поверхности. Оно складывается из годичного и суточного вращений Земли и прецессии орбиты спутника. Влияние годичного вращения Земли за сутки составляет 0.986°. Суточное вращение Земли дает вклад, равный wE× (P×N – 24h)×(1+m), где wE – угловая скорость вращения Земли, m - коэффициент перехода от звездного времени к среднему солнечному времени. Для спутников GPS этот член дает -1.015°, а сумма трех членов оказывается равной примерно -0.067°. Поэтому считается, что смещение трассы у спутников GPS незначительное, и, следовательно спутники проходят на следующие сутки на 4 минуты раньше почти по тому же месту небесной сферы.
При полном созвездии почти все пользователи при беспрепятственном обзоре неба имеют для наблюдений минимум четыре спутника на высоте более 15º. Более вероятно, что пользователь будет видеть 6-8 спутников.
5.2.2 Контрольный сегмент
Сердцем Контрольного сегмента является Главная станция управления, находящаяся на военно-воздушной базе Шривер (часто называемой Фалкон), около г. Колорадо Спрингс (шт. Колорадо, США). Главная станция управляет системой и обеспечивает командные и контрольные функции. Главными функциями Контрольного сегмента являются (рис. 5.6):
- отслеживание орбит спутников,
- отслеживание и поддержка рабочего состояния спутников,
- формирование системного времени GPS Time,
- расчет эфемерид спутников и параметров часов,
- обновление спутниковых навигационных сообщений,
- осуществление небольших маневров спутников для поддержания орбит (по мере необходимости).
Сигналы спутников непрерывно отслеживаются со станций слежения, широко распределенных на земном шаре по долготе: Остров Вознесения, Диего Гарсия, Кваджалейн, Гавайи и Колорадо Спрингс. С 2001 г. к этому списку нужно добавить Мыс Канаверал. Станции слежения, называемые также станциями мониторинга, наблюдают в автоматическом режиме (unmanned) на большом удалении от Главной станции управления. Оборудование контрольных станций состоит преимущественно из GPS приемников с цезиевыми стандартами частоты, метеорологическими инструментами и связным оборудованием для передачи измерений на Главную станцию управления через наземные и спутниковые линии связи.
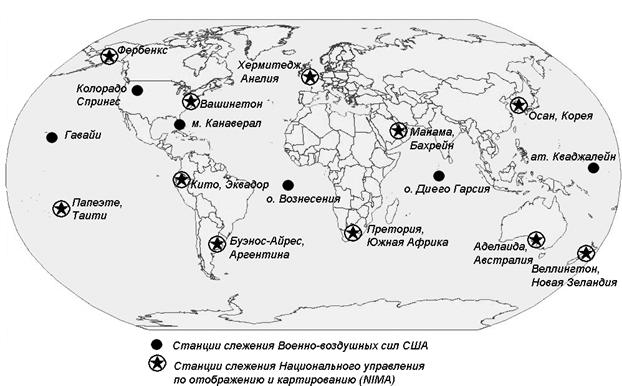
Рис. 5.6. Расположение станций контрольного сегмента GPS.
Наземные антенны для связи со спутниками через радио связь S-диапазона размещаются рядом со станциями слежения на Острове Вознесения, Мысе Канаверал, в Диего Гарсия и на атолле Кваджалейн. Эти 10-метровые параболические антенны дистанционно управляются с Главной станции управления, чтобы получать телеметрические данные со спутников о состоянии их подсистем, для засылки команд и загрузки данных для навигационных сообщений, затем транслируемых спутниками. Автоматическая станция слежения контрольной сети ВВС в Шривере также может работать как наземная GPS антенна для выдачи команд и проведения контроля.
Данные со станций слежения используются для определения и предсказания орбит спутников и поправок их часов. Время GPS Time определяется по набору атомных часов на спутниках и на станциях слежения. Синхронизация часов спутников выполняется посредством оценивания смещения шкалы, частоты и дрейфа частоты генератора каждого спутника по отношению к шкале времени GPS Time и передачей параметров модели в навигационном сообщении спутника. Эфемериды и параметры часов, транслируемые спутниками, вычисляются на Главной станции управления и загружаются на спутники через наземные антенны.
Транслируемое спутниками навигационное сообщение обычно загружается минимум один раз в сутки. Возможность измерять дальности между спутниками Блоков IIR и IIF позволит спутникам автоматически обновлять их навигационные сообщения и работать продолжительное время без контакта с Контрольным сегментом (спутники Блока IIA могут работать без контакта с Контрольным сегментом до 180 суток, уточняя свои орбиты на основе измерений спутник-спутник). Когда действует функция Autonav, Контрольный сегмент продолжает отслеживать сигналы, чтобы выявлять недопустимые условия для параметров навигационного сообщения и составлять расписание для новых загрузок, если они потребуются [Misra and Enge 2001].
Важная, скрытая функция Контрольного сегмента - поддержка системы отсчета WGS84. Эта система отсчета доступна пользователям GPS через спутниковые эфемериды, вычисленные по данным, собранным на станциях мониторинга. Если какая-либо организация пожелает вычислить свои спутниковые орбиты (например, из пост-обработки данных наблюдений GPS, собранных со своей собственной наземной сети приемников), то полученная система отсчета будет определяться системой координат (или фиксироваться) станции наблюдения в этой системе. Это может быть и не WGS84, но обычно очень близкая к ней система отсчета. Основой для получаемых из пост-обработки эфемерид Международной GPS Службы (IGS, МГС) является Международная земная система отсчета (ITRF), которая очень близка к системе WGS84 (последние реализации системы WGS-84 совпадают с системами ITRF в пределах дециметра) (см. раздел 3.3).
5.2.3 Сигналы GPS
Сигналы, передаваемые спутниками GPS, исключительно сложные. Система GPS предназначена работать с однонаправленными измерениями (только прием); обслуживать неограниченное количество как военных, так и гражданских пользователей, обеспечивать точные, однозначные измерения дальностей в реальном времени; обеспечивать точные измерения доплеровского сдвига; обеспечивать точные измерения фазы несущей; обеспечивать передачу сообщения; обеспечивать исправление ионосферной задержки; допускать одновременные измерения от многих спутников; иметь защиту от интерференции; и иметь допустимую многопутность. Чтобы отвечать этим требованиям, сигналы GPS содержат несколько компонент. Официальное описание сигналов содержится в Интерфейсном контрольном документе ICD-GPS-200 [http://www.navcen.uscg.mil].
Электромагнитная волна в общем случае может быть охарактеризована четырьмя параметрами: амплитудой, частотой, фазой и поляризацией. Если один из этих параметров изменяется некоторым контролируемым способом, или модулируется, тогда электромагнитная волна может нести информацию. Широко применяется амплитудная модуляция, например, для передач на длинных, коротких и средних волнах и для многих способов космической связи; частотная модуляция применяется для высокоточных передач на очень высоких частотах; фазовая модуляция обычно используется для передачи данных. Модулирующий сигнал может либо непрерывно изменяться (аналоговая форма), либо иметь фиксированное число уровней (цифровая форма), в случае бинарной модуляции - два уровня.
Несущие частоты. Каждый спутник GPS непрерывно ведет передачи на двух несущих частотах L-диапазона, обозначаемых как L1 и L2 (символ L означает link, – связь). L-диапазон охватывает частоты между 1 и 2 ГГц и является частью УВЧ диапазона. Центры частот L1 и L2 равны:
- для L1 fL1= 1575.42 МГц,
- для L2 fL2=1227.60 МГц.
Частота L1 (длина волны lL1 » 19 см), получается путем умножения частоты задающего генератора (осциллятора) на 154 и модулируется C/A и P-кодами, частота L2 (длина волны lL2 » 24 см), получается умножением частоты задающего генератора на 120 и модулируется P-кодом (рис. 5.9). Обе несущие частоты дополнительно модулируются навигационным сообщением. Наличие P-кодов на двух частотах позволяет уверенно оценить ионосферную поправку и повысить точность.
Высокие несущие частоты используются по нескольким причинам. Сигналы GPS состоят из нескольких компонент. Для передачи этих составляющих необходима полоса пропускания примерно в 20 Мгц. Но эта полоса пропускания, к примеру, равна всему диапазону спектра очень высоких частот (ОВЧ). Такая высокая, сравнительно не шумная часть радио спектра необходима для сигналов типа GPS. Кроме того, сигналы GPS должны обеспечивать средство не только для определения высокоточных положений в реальном времени, но также и скоростей. Скорости измеряются посредством измерений небольшого сдвига в частоте принятых сигналов из-за эффекта Доплера. Чтобы достигнуть сантиметрового уровня точности в скорости, необходимы сигналы с сантиметровой длиной волны (микроволны).На микроволновых частотах сигналы являются высоко направленными и, следовательно, они легко блокируются, а также отражаются твердыми телами и водной поверхностью. Через облака или дым микроволны проходят легко, но они могут блокироваться плотной или влажной листвой.
Рис. 5.9. Структура сигнала спутника НАВСТАР.
5.2.4 Дальномерные коды
Используемые в GPS коды представляют собой бинарные коды, то есть последовательность из единиц и нулей (двухуровневый сигнал). Они имеют характеристики случайного естественного шума, но в отличие от последнего они легко контролируются и воспроизводятся средствами электроники. Использование математического алгоритма или особого оборудования, называемого tapped feedback registers - ленточными регистрами с обратной связью, можно генерировать последовательности, которые не повторяются после некоторого выбранного интервала времени. Поэтому их называют псевдо-случайным шумом (Pseudo Random Noice, PRN). Каждому спутнику НАВСТАР соответствует своя уникальная последовательность PRN, по которой спутник отождествляется аппаратурой пользователя, даже когда на его антенну одновременно приходят сигналы от нескольких спутников - известная техника связи множественного доступа с разделением по кодам (CDMA).
Точно такие же кодовые последовательности независимо воспроизводятся в GPS приемнике. Посредством совмещения ответной последовательности с принятой последовательностью и, зная момент времени, когда сигнал был передан спутником, можно вычислить время прохождения, и, следовательно, дальность r = ct (с – скорость света).
PRN коды GPS имеют дополнительные полезные свойства. Когда приемник обрабатывает сигналы от одного спутника, важно, чтобы не мешали сигналы, принятые одновременно от других спутников. PRN коды GPS специально были выбраны так, чтобы они были устойчивыми к взаимной интерференции. Кроме того, использование PRN кодов дает в результате сигнал, который имеет определенную степень невосприимчивости к непреднамеренному или обдуманному подавлению от других радио сигналов.
C/A-код. Каждый спутник передает два различных PRN кода: C/A (coarse/acquisition - грубое приобретение) и Р (precise – точный или protected – защищенный) коды. Оба кода формируются от генератора 10.23 Мгц, C/A-код – с делением частоты на 10, P-код – без изменения частоты. C/A код является последовательностью из 1 023 бинарных цифр или чипов, которые повторяются каждую миллисекунду. Это означает, что чипы генерируются со скоростью 1 за секунду, и что чип имеет продолжительность примерно в 1 микросекунду. Каждый чип, находясь на несущей волне, проходит через пространство со скоростью света. Поэтому мы можем преобразовать интервал времени в единицы расстояния, умножив его на эту скорость. Так, одна микросекунда переносит примерно 300 метров. Это есть длина волны C/A кода. Считается, что точность измерения расстояния равняется примерно 1% от длины волны, поэтому точность измерения расстояний по C/A коду равняется примерно трем метрам.
Из-за того, что C/A код повторяется каждую миллисекунду, GPS приемник может быстро захватывать сигнал и начинать совмещать принятый код с тем, который он генерирует. Однако по этой же причине измерения дальности имеют неоднозначность, кратную 300 км (рис. 5.10).

Рис. 5.10. С/А код укладывается в расстоянии между приемником и спутником не менее 67 раз.
Каждому спутнику назначается свой уникальный C/A код. Всего для спутников отводится 32 кодовых последовательности. Еще 4 дополнительных C/A кода предназначены для других пользователей, например, для наземных передатчиков.
P-код. Более высокую точность можно получить при более короткой длине волны. Чтобы получить более высокие точности, чем позволяет C/A код, спутники GPS передают также Р-код. Длина волны чипа Р-кода всего 30 м (рис. 5.11), т. е. 1/10 от длины волны чипа Р-кода, скорость с которой создается этот чип, соответственно в 10 раз быстрее: 1в секунду. Р-код - чрезвычайно длинная последовательность. Узор чипов не повторяется пока не пройдет 266 суток (38 недель) или около 2.35×1014 чипов. Каждому спутнику назначается уникальный одно-недельный сегмент этого кода, который повторно инициализируется в полночь с субботы на воскресенье каждую неделю.

Рис. 5.11. Расстояние, измеренное по Р коду, не имеет неоднозначности.
С 31 января 1994 г., чтобы ограничить доступ неавторизованным пользователям, спутники передают зашифрованную версию Р-кода, называемую Y-кодом. Этот код получается наложением на P код секретного W кода сложением по модулю 2. Частота W кода составляет около 500 КГц, то-есть на один чип W кода приходится 20 чипов Р кода. Как видно, в Y коде одни сегменты полностью соответствуют P коду (там, где сложение происходило с нулем W кода), другие же сегменты представляют дополнительный код (полученный сложением с единицей W кода).
Процесс шифрования Р кода известен под названием Anti-spoofing (AS).
Службы стандартного и точного позиционирования. В настоящее время C/A кодом модулируется несущая L1, в то время как зашифрованный Р-код передается и на L1 и на L2. Это значит, что пользователи с двухчастотными приемниками могут исправлять измеренные дальности за влияние ионосферы. Пользователи с одночастотными приемниками должны прибегать к моделям ионосферы, которые обычно охватывают только часть эффекта (см. раздел 7.2). Такой подход к более низкой точности C/A кода обеспечивается в GPS Службой стандартного позиционирования (SPS), этот уровень доступен гражданским пользователям. Служба точного позиционирования (PPS) обеспечивает доступ и к C/A коду, и к зашифрованному Р-коду и предназначается (преимущественно) для военных пользователей. Служба SPS предполагает дальнейшее намеренное понижение точности, называемое Selective Availability (SA). Режим SA воздействует через зашумление часов спутника (так называемый «дельта-процесс») и понижение точности транслируемых эфемерид («эпсилон-процесс»). Зашумление часов сказывается на всех измерениях псевдодальностей и фаз. Возможны различные уровни SA; уровень, который использовался до мая 2000 г., обеспечивал точность обычного планового положения в SPS в 100 м. Как и в случае с режимом AS, для преодоления SA авторизованные пользователи используют криптографический ключ. Почти все влияние режима SA можно исключить, используя дифференциальную методику (см. главу 9). Режим SA был включен на спутниках блока II в течение части 1990 г. SA отключался с 10 августа 1990 г. и 1 июля 1991 г. из-за кризиса в Персидском заливе. Стандартный уровень был вновь применен с 15 ноября 1991 г. С тех пор SA временами отключался для различных целей, также как и AS. Были призывы от гражданского сообщества понизить уровень зашумления и даже удаления режима SA. Обычно было два спутника блока II с малым уровнем SA или с полным отсутствием его. С 4 часов по всемирному времени 2 мая 2000 г. по указу президента США режим селективного доступа был отменен [Shaw et al. 2000].
5.2.5 Навигационное сообщение
Навигационное сообщение представляет собой поток данных, передаваемых каждым спутником на частотах L1 и L2 со скоростью 50 бит в секунду, то-есть один бит на каждые 20 повторений С/А кода. Структура навигационного сообщения показана на рис. 5.12. Полное навигационное сообщение состоит из 25 кадров, каждый из которых содержит 1500 бит. Каждый кадр разделен на 5 подкадров по 300 бит, а каждый подкадр содержит 10 слов по 30 бит. Передача одного кадра производится за 30 с, а полное сообщение передается за 12.5 минуты. Подкадры 1, 2 и 3 передаются в каждом кадре, то-есть они повторяются каждые 30 с. Содержание подкадров 4 и 5 изменяются в каждом кадре и повторяется только через 25 кадров, образующих суперкадр. Версии подкадров 4 и 5 называют страницами, таким образом, в навигационном сообщении имеется 25 страниц с подкадрами 4 и 5, и каждая из них повторяется каждые 750 с или 12.5 минуты.
Чтобы преобразовать измеренные между спутником и приемником дальности в положение, приемник должен знать, где находятся спутники. Чтобы сделать это легко и в реальном времени, необходимо, чтобы спутники передавали эту информацию. В соответствии с этим, имеется сообщение, накладываемое на несущие L1, и L2 вместе с PRN кодами. Каждый спутник транслирует свое собственное сообщение, которое состоит из орбитальной информации (эфемерид), используемой при вычислении положения, поправки его часов относительно времени GPST, и информации о работоспособности («здоровье») спутников и ожидаемой точности измерений дальности. Сообщение также содержит данные альманаха о других спутниках в созвездии GPS, а также о состоянии их здоровья и другую информацию. Данные альманаха, грубое описание орбит спутников, используются приемником для того, чтобы определить, где находится каждый спутник. Он использует эту информацию для быстрого захвата сигналов спутников, находящихся над горизонтом, но еще не отслеживаемых. Как только один спутник начинает отслеживаться, и его сообщение декодировано, получение сигналов от других спутников происходит очень быстро.
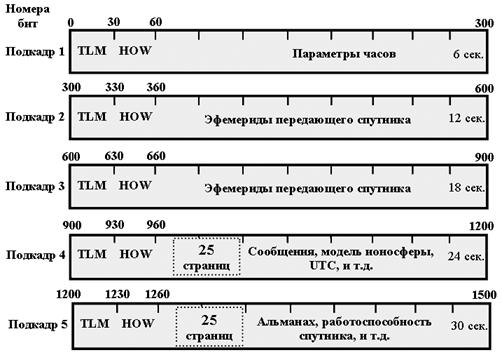
Рис. 5.12. Структура навигационного сообщения.
Каждый подкадр начинается со слов TLM и HOW. Телеметрическое слово TLM (telemetry word) содержит преамб резервных битов и 6 битов паритета. С его помощью обеспечивается синхронизация и некоторая диагностическая информация. Слово HOW (hand-over word), называемое иногда «словом передачи», представляет собой ключ для распознавания спутника и идентификации поступающей информации, а также для формирования показаний счета времени. Для приемников, которые отслеживают Р код, очень важна та часть информации в слове HOW, которая сообщает ему, откуда начинать поиск Р-кода. Как упоминалось ранее, сегмент Р кода, назначаемый каждому спутнику, имеет продолжительность 7 суток. GPS-приемник с изначально не синхронизированными часами должен вести поиск через генерированную им последовательность Р кода, чтобы совместить ее с входящим сигналом. Поиск только одной секунды кода занял бы много часов, поэтому приемнику нужна некоторая помощь. Эту помощь он получает именно из слова HOW.
2.5.6 Объединение передаваемой информации
Потоки чипов C/A кода и зашифрованного Р-кода раздельно объединяются с битами сообщения, используя сложение по модулю 2 (рис. 5.13). Если чип кода и бит сообщения имеют одно и то же значение (оба 0 или оба 1), то результат будет 0. Если значения чипа и бита сообщения различные, в результате будет 1. Затем несущие модулируются кодом и сложным сигналом сообщения. Это проще делается на канале L2, поскольку на нем передается только зашифрованный Р-код. Но канал L1 должен нести и зашифрованный Р-код, и C/A код. Это достигается методом, известным как квадратура фазы. Сигнал зашифрованного Р-кода накладывается на несущую L1 тем же способом, что и на несущую L2. Но, чтобы получить сигнал C/A кода на несущей L1, подается немодулированная несущая, которая сдвигается по фазе на 90°. Квадратурный компонент несущей смешивается с сигналом C/A кода и затем объединяется с зашифрованным Р-кодом модулированного синфазного компонента, после чего его можно передавать антенной космического аппарата.

Рис.5.13. Сложение по модулю два.
Бинарная парафазная модуляция. Как упоминалось выше, волны несущей можно модулировать несколькими способами. Для сигналов GPS используется способ фазовой модуляции. Из-за того, что PRN коды и навигационное сообщение являются бинарными потоками, должно быть два состояния фазовой модуляции. Этими двумя состояниями являются нормальное состояние, представляющее бинарный ноль, и состояние зеркального изображения, представляющее бинарную единицу. Нормальное состояние покидает несущую неизмененным. Состояние зеркального изображения приводит к умножению немодулированной несущей на -1. Поэтому каждый переход кода с 0 на 1 (нормального на зеркальное изображение) или от 1 на 0 (зеркального изображения на нормальное) вызывает переброс фазы или сдвиг фазы на 180° (рис. 5.14). Эта техника известна как бинарная парафазная модуляция.

Рис. 5.14. Бинарная парафазная модуляция несущей частоты.
Часы спутников GPS и время. Счет времени и частота для несущих, коды PRN и навигационное сообщение, когерентно формируются из частоты атомного генератора, расположенного на борту спутника и работающего на частоте 10.23 Мгц (и компенсируемого за самый большой релятивистский частотный сдвиг). Частота L1, 1575.42 МГц = 154х10.23 МГц, 1227.6 Мгц = 120х10.23 Мгц. Каждый спутник имеет на борту 4 генератора (два цезиевых и два рубидиевых на спутниках блока II), каждый из которых подчиняется командам от Главной станции управления GPS. Долговременная нестабильность бортовых генераторов частоты составляет несколько единиц 10-13 и даже 10-14 в течение суток. Будущие водородные мазеры будут иметь стабильность на уровне 10-14 – 10-15 на интервале в одни сутки.
Сигналы времени, передаваемые спутниками GPS, до 1990 г. синхронизировались с атомными часами Главной станции контроля в Колорадо в пределах 1 mс, формируя шкалу времени GPS Time (GPST). Однако в настоящее время GPST выводится из обработки объединенных часов, состоящих из часов всех станций мониторинга и часов действующих спутников. Время GPST было совмещено со всемирным координированным временем UTC в 0h 6 января 1980 года, но в отличие от UTC оно не инкрементируется на величину скачков секунд. Поэтому расхождение между шкалами GPST и UTC постоянно увеличивается в соответствии со скачками секунд, добавляемыми к шкале UTC. На начало 2004 г. расхождение достигло 13 с, то есть GPST=UTC + 13s плюс доли микросекунды, которые изменяются ото дня ко дню.
Наибольшей единицей времени в GPST является неделя GPS, содержащая 604800 секунд. Отдельная эпоха идентифицируется по времени GPST как число, которое прошло от предыдущей полуночи с субботы на воскресенье. Такая мера времени является, конечно, неоднозначной, поскольку необходимо указать, к какой неделе относится эпоха. Счет недель GPS начат с 0h от 6 января 1980 года и нумеруется последовательно. Таким образом, указание эпохи по GPST состоит из номера недели GPS и номера секунды в этой неделе.
Для геодезических применений важен учет релятивистских эффектов. Атомные стандарты частоты на спутниках подвержены эффектам специальной теории относительности (из-за скорости спутника) и общей теории относительности (из-за разности гравитационных потенциалов на орбите спутника и на земной поверхности). Большая часть этих эффектов являет общей для всех спутников и не зависит от эксцентриситета орбиты. Соответствующее относительное смещение частоты составляет Df/f = -4.4647×10-10. Это смещение соответствует увеличению во времени на 38.3 mс за сутки (часы на орбите идут быстрее), а изменение в основной частоте 10.23 МГц составляет Df =0.0045674 Гц. Поэтому на заводе перед запуском спутника его основная частота настраивается на величину 10. МГц. Вторая часть релятивистского эффекта пропорциональна эксцентриситету орбиты спутника. Для круговых орбит она равна нулю. Для спутников GPS с эксцентриситетом около 0.02 влияние может достигать 45 нс, что соответствует ошибке в расстоянии в 14 м. Однако этот эффект можно учесть, используя несложное выражение, представляющего влияние в виде функции большой полуоси, эксцентриситета и эксцентрической аномалии (см. раздел 7.5). При относительном позиционировании влияние релятивистских эффектов практически полностью исключается [Leick 1995].
Поляризация. Сигналы, передаваемые спутниками GPS, имеют правостороннюю круговую поляризацию (right hand circular polarization, RHCP). Круговая поляризация используется повсеместно для сигналов, передаваемых с космических аппаратов, чтобы бороться с проблемой затухания, связанным с Фарадеевым вращением плоскости поляризации из-за магнитного поля Земли. Для сигнала с RCHP для обеспечения максимальной силы сигнала в приемнике необходимо использовать антенну с RCHP. При отражении сигнала поляризация с правосторонней меняется на левостороннюю (left hand circular polarization, LHCP).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
