
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() , (78)
, (78)
Обычно m <10-6 и дается в единицах 6-го или 9-го знака.
Часто встречающееся в космической геодезии преобразование прямоугольных координат с использованием операций переноса, поворота на углы Кардано и масштабирования записывается следующим образом:
![]() , (79)
, (79)
или
 . (80)
. (80)
Этот вид преобразований нередко называют преобразованием по Гельмерту, или 7-параметрическим преобразованием, или Евклидовым преобразованием подобия, а входящие в него параметры трансформирования - параметрами Гельмерта.
В таблице 3.4 приводятся параметры связи для некоторых систем, в некоторых случаях знаки параметров, взятых из публикаций, приведены в соответствие с формулой (3.80).
Таблица 4. Параметры преобразования земных систем координат
Направление пере- хода, источник | Параметры связи |
| |||||
TX (м) | TY (м) | TZ (м) | m(б/р) |
|
|
| |
СК-42®ПЗ-90, [46] | +25 | -141 | -80 | 0 | 0 | -0.35 | -0.66 |
СК-42®СК-95, [47] | +1.8 | -9.0 | +6.8 | -1.5×10-7 | +0.02 | -0.38 | -0.85 |
ПЗ-90®СК-95, [47] | -25.90 | +130.94 | +81.76 | 0 | 0 | 0 | 0 |
ПЗ90® WGS-84, [46] | 0 | 0 | +1.5 | 0 | 0 | 0 | -0.076 |
ПЗ90® WGS-84, [110] | 0 | 0 | +2.5 | 0 | 0 | 0 | -0.4 |
ПЗ90® WGS-84, [89] | -1.1 | -0.3 | -0.9 | -0.12×10-6 | 0 | 0 | -0.169 |
2.8.2 Преобразование эллипсоидальных координат
Очень часто используется преобразование в геодезических координатах B, L, H, при котором координаты в системе СК2 сразу получаются через координаты в системе СК1, минуя переход к прямоугольным координатам:
 . (81)
. (81)
Поправки DB, DL, DH являются не только функциями параметров связи координатных систем, но также зависят от изменения размеров и формы референц-эллипсоидов, и, следовательно, должны содержать девять параметров. Вероятно, первое появление в печати данных формул было сделано в Трудах ЦНИИГАиК, вып. 131, , и [Молоденский 1961]. Однако в них не учитывалось изменение масштаба, то есть они аналогичны шести-параметрическому преобразованию по Гельмерту. В зарубежной литературе это преобразование называется как «метод Молоденского», например [Botton et al. 1997; Harvey 1986], или «стандартные формулы Молоденского» [DMA Technical Report 1991]. Полные формулы преобразования имеют вид [Герасимов 1996]:
 (82)
(82)
![]() (83)
(83)
 (84)
(84)
Здесь
![]() , (85)
, (85)
![]() , (86)
, (86)
![]() , (87)
, (87)
 . (88)
. (88)
Глобальные методы преобразования координат обеспечивают высокую точность при работе с точными координатными системами, например ITRF. При трансформировании локальных референцных координат ошибки могут значительно возрастать из-за того, что параметры связи координатных систем во многих случаях определяются по ограниченной выборке точек и не могут учитывать локальных нелинейных искажений в сетях. Например, точность перехода из системы ПЗ-90 в СК-42 оценивается в 2 - 4 м [Основные положения о ГГС России 1997], а из WGS-84 в СК-42 - в 5 - 7 м [Бойков 1993]. Следует также иметь в виду, что с появлением новых реализаций координатных систем повышается точность глобальных методов трансформирования.
Для преобразования координат в локальных областях пользуются методами, в которых переход от одной системы в другую осуществляется по тем же алгоритмам, какие используются в глобальных методах, но параметры перехода или часть из них определяются по измерениям на опорных точках в рассматриваемой области.
2.9 СИСТЕМЫ ВЫСОТ
2.9.1 Определение систем высот
Для передачи высот от начала нивелирной сети - точки A на поверхности геоида (рис. 3.13) к точке В методом геометрического нивелирования суммируют все превышения, измеренные на всех станциях:
![]() . (96)
. (96)
Рис. 3.13. Поверхности относимости в системах высот
Получаемая подобным образом высота зависит от пути нивелирования. Это вызвано непараллельностью уровенных поверхностей, обусловленной наличием аномальных масс.
Проведем в точках A и M уровенные (эквипотенциальные) поверхности ![]() и
и ![]() . Уровенная поверхность, проходящая через точку А и совпадающая с уровнем моря, является геоидом. Следует иметь в виду, что топографическая поверхность моря в спокойном состоянии не является эквипотенциальной поверхностью. Несовпадение между ними может достигать 2.5 м. Проведем также силовые линии АА0 и ММ0 до их пересечения с эллипсоидом. Ортометрической высотой называется расстояние между геоидом и данной точкой, отсчитываемое по силовой линии, проходящей через точку. Ортометрическая высота для точки М может быть получена по формуле:
. Уровенная поверхность, проходящая через точку А и совпадающая с уровнем моря, является геоидом. Следует иметь в виду, что топографическая поверхность моря в спокойном состоянии не является эквипотенциальной поверхностью. Несовпадение между ними может достигать 2.5 м. Проведем также силовые линии АА0 и ММ0 до их пересечения с эллипсоидом. Ортометрической высотой называется расстояние между геоидом и данной точкой, отсчитываемое по силовой линии, проходящей через точку. Ортометрическая высота для точки М может быть получена по формуле:
 , (97)
, (97)
где ![]() - среднее значение реальной силы тяжести на отрезке ММ1, а
- среднее значение реальной силы тяжести на отрезке ММ1, а ![]() - измеренное значение силы тяжести вдоль линии нивелирования АМ. Без ущерба для точности ортометрическую высоту можно отсчитывать по нормали к эллипсоиду. Недостатком ортометрических высот является то, что для их точного вычисления требуется знание строения земной коры, иными словами, точность вычисления ортометрических высот зависит от принятой гипотезы о строении земной коры.
- измеренное значение силы тяжести вдоль линии нивелирования АМ. Без ущерба для точности ортометрическую высоту можно отсчитывать по нормали к эллипсоиду. Недостатком ортометрических высот является то, что для их точного вычисления требуется знание строения земной коры, иными словами, точность вычисления ортометрических высот зависит от принятой гипотезы о строении земной коры.
От этого недостатка свободна предложенная система нормальных высот, в которых высота точки может быть вычислена по формуле:
![]() , (98)
, (98)
где ![]() - значение нормальной силы тяжести на высоте
- значение нормальной силы тяжести на высоте  над эллипсоидом. На поверхности эллипсоида нормальная сила тяжести g0 вычисляется по формуле Гельмерта
над эллипсоидом. На поверхности эллипсоида нормальная сила тяжести g0 вычисляется по формуле Гельмерта
![]() , (99)
, (99)
где
![]() , (100)
, (100)
![]() . (101)
. (101)
Нормальная сила тяжести во внешнем пространстве находится по формуле:
![]() , (102)
, (102)
где H - высота над эллипсоидом. Значения коэффициентов приводятся для эллипсоида со сжатием a =1/298.257 ±0.001 и силе тяжести на экваторе ge = 978033 мгал.
Нормальные высоты определяются теоретически строго, поскольку gm может быть вычислено практически безошибочно. Нормальные высоты, вычисленные по формуле (3.98), отсчитываются от поверхности квазигеоида. Разность между ортометрической и нормальной высотой можно оценить по формуле [Машимов 1982]:
![]() . (103)
. (103)
Эта разность характеризует отступление квазигеоида от геоида. В горных районах возможно отступление до 2 - 3 м, но в большинстве случаев оно имеет величину порядка нескольких см. На морях и океанах квазигеоид совпадает с геоидом.
При измерениях базовых линий с применением GPS-технологий относительными методами измеряется разность эллипсоидальных высот:
![]() . (104)
. (104)
Чтобы передать нормальную (или ортометрическую) высоту на точку М, необходимо знать высоты квазигеоида (или геоида) над эллипсоидом для начала и конца базовой линии, т. е. нужно привлекать информацию о квазигеоиде (геоиде):
![]() . (105)
. (105)
Способы определения геоида при GPS измерениях будут рассмотрены в 12-й главе.
2.9.2 Балтийская система высот
Современная нивелирная сеть России (СНГ) подразделяется на сети I, II, III и IV классов. Главной высотной основой являются сети I и II классов, прокладываемые вдоль железных дорог, шоссе, улучшенных грунтовых дорог, по берегам больших рек, а в отдельных случаях и по грунтовым дорогам и тропам.
Нивелирная сеть строится в виде замкнутых полигонов и отдельных линий большой протяженности. Нивелирная сеть II класса опирается на реперы I класса и создается в виде полигонов с периметром от 400 до 800 км в обжитых районах и 1км - в необжитых районах. На востоке страны нивелирные линии I и II классов иногда достигают 6км. Сети III и IV классов прокладываются внутри полигонов высшего класса, причем для III класса предельное значение периметра полигона не более 150 км (в восточных районах - до 300 км), а длины линий IV класса - не более 50 км. Нивелирные сети всех классов закрепляются на местности реперами или стенными марками не реже, чем через 5 км. Невязки в нивелировании I, II, III и IV классов не должны превышать в миллиметрах соответственно ![]() ,
, ![]() ,
, ![]() и
и ![]() , где L - длина хода в км.
, где L - длина хода в км.
К середине 70-х годов в СССР в соответствии с программой, разработанной в ЦНИИГАиК, была построена высокоточная нивелирная сеть I и II классов. Общая протяженность линий I класса составила 70000 км, а линий II класса - 360000 км. При уравнивании нивелирная сеть I и II классов была разбита на блоки «Запад» и «Восток», граница между которыми проходила по линии I класса Архангельск - Казань - Аральское море - Арысь. Вычисления выполнялись в системе нормальных высот от нуля Кронштадтского футштока. Средние квадратические ошибки на один километр нивелирного хода составили:
I класс II класс
Блок «Запад» 1.6 мм 2.7 мм
Блок «Восток» 2.1 мм 3.6 мм
Это говорит о том, что сеть, закрепляющая Балтийскую систему высот 1977 г. (БСВ-77), протянувшаяся более, чем накм по долготе и на 3000 км по широте, построена с очень высокой точностью. Наиболее удаленные от Кронштадтского футштока пункты определены со средней квадратической ошибкой не более 15 см [Яковлев 1981]. По данным ЦНИИГАиК точность нивелирных сетей по результатам уравнивания характеризуется следующими средними квадратическими ошибками на километр хода [Национальный отчет 1993]:
I класс 0.5 мм,
II 0.8 мм,
III 1.6 мм,
IV класс 6 мм.
2.10 ТОПОЦЕНТРИЧЕСКИЕ СИСТЕМЫ КООРДИНАТ
Оси таких систем параллельны осям геоцентрических координатных систем. Если начало системы находится в некоторой точке наблюдений А, то их называют топоцентрическими. Следовательно, можно образовать истинную небесную топоцентрическую систему ![]() , среднюю небесную топоцентрическую систему на эпоху t -
, среднюю небесную топоцентрическую систему на эпоху t - ![]() , общеземную топоцентрическую систему
, общеземную топоцентрическую систему  и другие. С помощью таких координат задается взаимное положение пунктов. Связь между этими системами выражается теми же формулами, что и между геоцентрическими системами.
и другие. С помощью таких координат задается взаимное положение пунктов. Связь между этими системами выражается теми же формулами, что и между геоцентрическими системами.
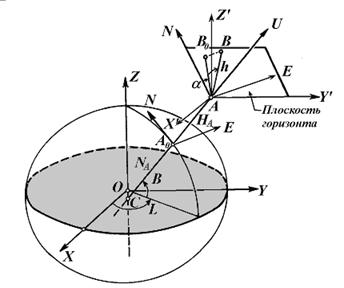
3 Рис. 3.14. Система локальных координат NEU.
Очень часто при построении геодезических сетей спутниковыми методами применяются локальные геодезические координаты, основной плоскостью которых является плоскость геодезического горизонта, ось U направлена в геодезический зенит пункта, ось N - на север, а ось E - на восток (рис. 3.14). Связь координат ![]() с топоцентрическими
с топоцентрическими ![]() определяется формулой:
определяется формулой:
 , (106)
, (106)
где матрица ![]() выражается через геодезические координаты
выражается через геодезические координаты ![]() ,
, ![]() пункта А:
пункта А:
 . (107)
. (107)
Сферическими координатами пункта В в данной системе являются: геодезический азимут a и геодезическая высота над горизонтом h;
![]() ,
,  . (108)
. (108)
3.1.1 Очевидно, что координаты  с пункта А на В и с пункта В на А различаются не только по знаку, но и по величине.
с пункта А на В и с пункта В на А различаются не только по знаку, но и по величине.
Подобная система координат  может быть образована, если в качестве основной плоскости использовать плоскость астрономического горизонта. Тогда ось
может быть образована, если в качестве основной плоскости использовать плоскость астрономического горизонта. Тогда ось ![]() оказывается направленной в астрономический зенит пункта, а оси
оказывается направленной в астрономический зенит пункта, а оси ![]() и
и ![]() - соответственно на север и на восток. Если
- соответственно на север и на восток. Если ![]() - астрономическая широта пункта P, а
- астрономическая широта пункта P, а ![]() - его астрономическая долгота, то астрономический азимут A* и высоту h* можно вычислить по формулам (3.106)-(3.108), заменив в них B на
- его астрономическая долгота, то астрономический азимут A* и высоту h* можно вычислить по формулам (3.106)-(3.108), заменив в них B на ![]() и L на
и L на ![]() .
.
Лекция 7. Уравнения наблюдений
7.1. Виды ГНСС наблюдений и их модели
По спутникам ГНСС можно измерять три вида параметров: псевдодальности P, фазы несущей Ф и доплеровские сдвиги D. Применение последнего из параметров для позиционирования весьма ограниченное, и поэтому подробнее остановимся на первых двух.
Вывод уравнения псевдодальности (по монографии).
Вывод уравнения фазы.
Уравнения наблюдений псевдодальности или фазы несущей при измерениях с некоторого пункта A на спутник i, часто записывают в виде:
 (1)
(1)
 (2)
(2)
В них в левой части находится результат измерений в эпоху t в линейной мере. В правой части имеем: ![]() - геометрическая дальность, то есть истинное расстояние между приёмником в момент приёма сигнала и спутником в момент выхода сигнала,
- геометрическая дальность, то есть истинное расстояние между приёмником в момент приёма сигнала и спутником в момент выхода сигнала, ![]() - время прохождения сигнала,
- время прохождения сигнала, ![]() - ионосферная задержка,
- ионосферная задержка, ![]() - тропосферная задержка,
- тропосферная задержка, ![]() - поправки часов соответственно для спутника и для приемника,
- поправки часов соответственно для спутника и для приемника, ![]() - влияние многопутности на кодовые и фазовые измерения,
- влияние многопутности на кодовые и фазовые измерения,  - запаздывания сигналов в цепях измерения псевдодальности и фазы в приемнике и на спутнике,
- запаздывания сигналов в цепях измерения псевдодальности и фазы в приемнике и на спутнике, ![]() - начальные фазы генераторов приемника и спутника,
- начальные фазы генераторов приемника и спутника, ![]() - целочисленная начальная неоднозначность фазы, l - длина несущей волны,
- целочисленная начальная неоднозначность фазы, l - длина несущей волны, ![]() и
и ![]() - шумы измерения псевдодальности и фазы.
- шумы измерения псевдодальности и фазы.
В уравнениях (1), (2) не учтены релятивистские и динамические эффекты.
Псевдодальности P – расстояние между приемником в момент приема сигнала t и спутником в момент выхода сигнала t-t, искаженное влиянием ошибок часов, запаздываний в аппаратуре, среды распространения сигнала и др. Псевадодальности могут измеряться по стандартному коду ГЛОНАСС (C/A код в системе GPS) или коду повышенной точности (P код в GPS). Измерения псевдодальностей производятся мгновенно и могут выполняться с большой частотой. Каждое измерение не связано с остальными измерениями. Шум наблюдений eP для псевдодальности по P коду составляет несколько дециметров, по стандартному коду шум eC/A » 3 м.
Фаза – разность фаз несущей, переданной спутником и ее копией, созданной в приемнике. Этому параметру наблюдений присущи все те же факторы влияний, которые оказывают влияние на псевдодальности.
Наблюдения фазы несущей Ф должны производиться непрерывно, восстановление потерь счета циклов в наблюдении фазы является сложной задачей, особенно когда их много. В отличие от кодовых измерений каждое наблюдение фазы взаимосвязано с остальными измерениями данного спутника. При сохранении постоянного захвата сигнала спутника появляется возможность производить высокоточные кинематические измерения.
Все наблюдения фазы для одного спутника ![]() содержат одну и ту же начальную целочисленную неоднозначность
содержат одну и ту же начальную целочисленную неоднозначность ![]() . Фазовые наблюдения имеют пренебрежимо малый шум, обычно
. Фазовые наблюдения имеют пренебрежимо малый шум, обычно ![]() мм.
мм.
Результаты наблюдений содержат ошибки со свойствами пространственно-временной корреляции. Кроме того, наблюдения фазы на разных частотах могут быть сильно коррелированными из-за особенностей обработки фазы при освобождении от зашифрованного P кода, или могут относиться к фазе с половинной длиной волны (в приемниках с квадратурной обработкой сигнала).
Лекция 7. Геометрическая дальность
Геометрическая дальность связывает координаты центра масс спутника, к которому относится теория его движения, и координаты объекта наблюдений, на котором устанавливается антенна приемника:
 . (3)
. (3)
Здесь  - геоцентрический радиус-вектор спутника в момент выхода сигнала,
- геоцентрический радиус-вектор спутника в момент выхода сигнала,  - поправка для приведения измерений от фазового центра антенны спутника к его центру масс,
- поправка для приведения измерений от фазового центра антенны спутника к его центру масс, ![]() - геоцентрический радиус-вектор пункта наблюдений в момент прихода сигнала,
- геоцентрический радиус-вектор пункта наблюдений в момент прихода сигнала, ![]() - поправка для приведения измерений от фазового центра антенны к центру знака. Без ущерба для строгости изложения поправки и
- поправка для приведения измерений от фазового центра антенны к центру знака. Без ущерба для строгости изложения поправки и  в уравнении (3) опустим, а также не будем указывать моменты, к которым относятся координаты. Тогда
в уравнении (3) опустим, а также не будем указывать моменты, к которым относятся координаты. Тогда
 . (4)
. (4)
Выражение (4) обычно приводится к линейному виду. Для этого вводятся приближенные (априорные) величины для векторов положений спутника ![]() и приемника
и приемника ![]() . Чтобы ограничиваться первыми членами разложений, необходимо иметь их значения достаточно близкие к истинным значениям. Поправки к приближенным положения спутника и приемника обозначим через
. Чтобы ограничиваться первыми членами разложений, необходимо иметь их значения достаточно близкие к истинным значениям. Поправки к приближенным положения спутника и приемника обозначим через  и
и  . Таким образом,
. Таким образом,
![]() , (5)
, (5)
![]() . (6)
. (6)
Подстановка выражений (5) и (6) в (4) с последующим разложением в ряд Тейлора при ограничении до членов первого порядка дает:
 (7)
(7)
Первый член в правой части выражения (7) является приближенным значением геометрической дальности
![]() . (8)
. (8)
Вектор ![]() является вектором частных производных от геометрической дальности по координатам, вычисленный с их приближенными значениями:
является вектором частных производных от геометрической дальности по координатам, вычисленный с их приближенными значениями:
 (9)
(9)
Он представляет собой единичный вектор направления с пункта А на спутник i.
Поправку к вектору положения спутника dri можно выразить через поправки в элементы орбиты и использовать измерения псевдодальности или фазы для уточнения параметров движения или параметров возмущающих сил.
Эфемериды спутников, поправки часов спутников. Эфемериды спутников СРНС могут представляться в нескольких формах. Эфемериды, транслируемые спутником в составе навигационного сообщения (бортовые эфемериды), приемник получает непосредственно в процессе измерений. Точность этих эфемерид постоянно улучшается: если в начале 1980-х годов для спутников GPS она составляла 20-30 м, то в настоящее время она доведена до 2 м. Если точность эфемерид бортового сообщения недостаточная, то можно воспользоваться эфемеридами и поправками часов Международной ГНСС службы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
