
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При пространственном позиционировании требуется, как минимум, еще одна опорная станция. Соответствующие этому случаю поверхности положения являются двухполостными гиперболоидами вращения.
2.6.5. Доплеровское позиционирование
Другой принцип распространения радиоволн, используемый для радионавигации, называется эффект Доплера: изменение частоты сигнала, принятого наблюдателем, из-за относительного движения между передатчиком и приемником. Доплеровский сдвиг частоты определяется как разность между частотой принятого сигнала и частотой радио источника. Переданная и принятая частоты, fT и fR, связаны соотношением:
 , (3)
, (3)
где r – изменяющееся расстояние между передатчиком и приемником, ![]() - скорость изменения этого расстояния или лучевая скорость, vs – скорость распространения радиоволны.
- скорость изменения этого расстояния или лучевая скорость, vs – скорость распространения радиоволны.
Поскольку
![]() ,
,
то его дифференцирование по времени дает:
![]() .
.
В этом уравнении разности скоростей пункта и спутника представляют собой компоненты вектора лучевой скорости:
![]() .
.
2.1.1.1.1 МЕТОДЫ НАВИГАЦИИ
2.1.1.1.2 Навигация - основной раздел судовождения, в котором:
- разрабатываются теоретические обоснования и практические приемы вождения судов;
- рассматриваются вопросы выбора кратчайшего и безопасного пути следования судна в море и удержания судна на выбранном пути.
 Система навигации – это управление курсом человека или устройства. Существует множество видов систем навигации: бортовая система навигации – управление автомобилем, спутниковая система навигации, воздушная система навигации, морская система навигации и т. д.
Система навигации – это управление курсом человека или устройства. Существует множество видов систем навигации: бортовая система навигации – управление автомобилем, спутниковая система навигации, воздушная система навигации, морская система навигации и т. д.
АЭРОНАВИГАЦИЯ, совокупность методов и средств для определения действительных и желаемых положения и движения летательного аппарата, рассматриваемого как материальная точка. Термин «навигация» чаще применяется к длительным маршрутам (суда, самолеты, межпланетные станции). Для быстротечных маршрутов (ракеты, управляемые снаряды), в особенности с нестационарным пунктом назначения, более употребителен термин «наведение».
Средства аэронавигации бывают астрономическими, светотехническими, геотехническими и радиотехническими. Астрономические средства навигации позволяют определить местоположение и курс движения летательного аппарата по измеренным угловым координатам небесных светил. Астронавигационные системы работают автономно и не накапливают навигационных ошибок в процессе движения. Однако зависимость от метеоусловий ограничивает возможности применения астронавигационных средств в авиации. Важную роль они продолжают играть в навигации космических летательных аппаратов и кораблевождении. См. НАВИГАЦИЯ; КОСМОСА ИССЛЕДОВАНИЕ И ИСПОЛЬЗОВАНИЕ.
Светотехнические средства навигации основаны на использовании стационарных (наземных) источников света и применяются для ближней аэронавигации – главным образом при посадке летательного аппарата в сложных метеорологических условиях или ночью. См. также ВОЗДУШНЫМ ДВИЖЕНИЕМ УПРАВЛЕНИЕ; АЭРОПОРТ.
К геотехническим средствам аэронавигации относятся разнообразные навигационные приборы и системы, основанные на измерении и использовании параметров геофизических полей Земли (гравитационного, геомагнитного, атмосферного, топографического и др.). В эту группу входят гравиметры, магнитные компасы, барометрические высотомеры, измерители воздушной скорости, навигационные карты и пр. Широко распространены гироинерциальные средства, обеспечивающие автономность навигации; они основаны на использовании гироскопического эффекта для определения параметров движения и ориентации летательного аппарата. См. ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ; ГИРОСКОП; АВИАЦИОННЫЕ БОРТОВЫЕ ПРИБОРЫ.
Наиболее обширную и важную группу аэронавигационных средств образуют радиотехнические средства, располагаемые на борту, на Земле и на других летательных аппаратах. Обычно в аэронавигации приборы и системы, основанные на упомянутых выше различных принципах, используются комплексно, поскольку каждой группе аэронавигационных средств присущи свои достоинства и недостатки.
Понятие аэронавигации охватывает три процесса: 1) определение положения и скорости летательного аппарата в опорной системе координат; 2) сравнение измеренных значений с расчетными для данного момента времени; 3) пересчет результатов сравнения в команды управления, обеспечивающие такое изменение параметров движения, которое обеспечивало бы выполнение маршрута полета и достижение цели. Основное внимание при рассмотрении навигации в данной статье будет уделено вопросам определения положения и скорости.
СИСТЕМЫ СЧИСЛЕНИЯ ПУТИ
В тех случаях, когда информация от внешних источников недоступна, для оценки положения и скорости движения самолета может быть использована процедура счисления пути. Так, самолет, летящий в густом тумане и лишенный радиосвязи, может прокладывать свой маршрут, используя показания измерителя воздушной скорости, магнитного компаса, часов и оценки параметров ветра. Исходя из данных о текущем положении и имея карту, можно удерживать самолет на вычисленном курсе, регулируя воздушную скорость с учетом скорости и направления ветра. Изменение местоположения и скорости самолета в земной системе координат определяется по истекшему времени и оценке путевой скорости.
Счисление пути не обеспечивает высокой точности; тем не менее этот метод имеет фундаментальное значение для навигации. На счислении пути основаны инерциальные навигационные системы.
Инерциальные навигационные системы. Это автономные бортовые системы, в которых компьютер и гироскопы используются для создания опорной системы координат, а акселерометры, измеряя ускорения по соответствующим осям, позволяют определить соответствующие скорости движения. Результаты измерений гироскопов и акселерометров обрабатываются компьютером, который выдает сигналы на входы систем автоматического управления полетом и на навигационные индикаторы пилотов. В прошлом гироскопы и акселерометры располагали на гиростабилизированной платформе. С развитием вычислительной техники стали использовать бесплатформенные инерциальные системы, в которых поддержание опорной системы координат и большой объем навигационных вычислений выполняет бортовой компьютер.
После начальной выставки инерциальных приборов с использованием местной вертикали и направления на Север инерциальные системы обеспечивают автоматическое определение данных о местоположении, скорости, ускорении, направлении полета и других характеристик. Вследствие интегрирования сигналов акселерометров ошибки инерциальных систем с течением времени нарастают. Для инерциальных систем гражданского назначения допускается накапливающаяся погрешность в определении местоположения до 3 км за каждый час полета.
Системы инерциальной навигации особенно важны в условиях, когда не приходится рассчитывать на помощь со стороны (например, при полете ракет, а также длительных полетах самолетов над территориями, где нет адекватной сети наземных радиостанций); по своим функциональным возможностям они хорошо дополняют радионавигационные средства.
СРЕДСТВА РАДИОНАВИГАЦИИ
При радионавигации несущую частоту излучаемых электромагнитных волн модулируют речевыми или закодированными сигналами таким образом, чтобы передаваемую информацию можно было легко использовать. Кроме того, используется направленность радиолуча и то обстоятельство, что излучаемая волна распространяется в пространстве с известной скоростью.
Распространение излучения зависит от его частоты (см. РАДИО И ТЕЛЕВИДЕНИЕ). При аэронавигации обычно используются частоты от 50 кГц до более 300 МГц. Для повышения эффективности передачи и приема целесообразно применять остро настроенные резонансные схемы, рассчитанные на единственную хорошо стабилизированную несущую частоту. См. также АНТЕННА.
Инерциальная система навигации - навигационное устройство, в основу работы которого положены классические (ньютоновские) законы механики. В инерциальной системе навигации исходной (главной) системой отсчета, по отношению к которой производятся инерциальные измерения, служит инерциальная (абсолютная, т. е. неподвижная относительно звезд) система. Посредством инерциальной системы навигации определяют координаты, скорость, ускорение и др. основные параметры движения объекта (самолета, ракеты, космического корабля, надводных и подводных судов и др.). Инерциальные системы навигации имеют перед другими навигационными системами большие и важные преимущества - универсальность применения, возможность определения основных параметров движения, автономность действия, абсолютную помехозащищенность. Эти качества определили инерциальную систему навигации как наиболее перспективную навигационную систему.
ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ
Инерциальная навигация - метод измерения ускорения судна или летательного аппарата и определения его скорости, положения и расстояния, пройденного им от исходной точки, при помощи автономной системы. Системы инерциальной навигации (наведения) вырабатывают навигационную информацию и данные для управления на борту самолетов, ракет, космических аппаратов, морских судов и подлодок.
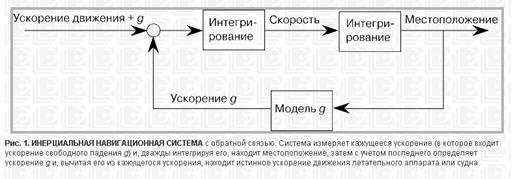
Теоретические основы. Ускорение есть быстрота изменения скорости, а скорость – быстрота изменения положения. Измеряя ускорение движения, можно путем его интегрирования вычислять скорость. Интегрированием же скорости можно определять текущее местоположение (координаты) летательного аппарата или судна. Таким образом, система инерциальной навигации есть система счисления пути.
Ускорение является векторной величиной, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Акселерометр измеряет величину. Информацию о направлении дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Акселерометры, измеряя фактическое ускорение, скажем, летательного аппарата, в то же время реагируют на гравитационное поле. Для компенсации этого ускорения система инерциальной навигации вычитает из выходных данных акселерометров вычисленное значение g. Величина g вычисляется как функция местоположения (координат), в частности долготы и широты.
Итак, система инерциальной навигации измеряет кажущееся ускорение, в которое входит ускорение свободного падения. Затем она, дважды интегрируя эту величину, находит местоположение. И наконец, исходя из этого вычисленного местоположения, вычисляет величину g, которая вычитается из кажущегося ускорения. Такая система с обратной связью второго порядка (рис. 1) ведет себя, как генератор колебаний очень низкой частоты в двух ортогональных горизонтальных направлениях. Период колебаний на уровне моря равен 84 мин; они называются колебаниями Шулера по имени немецкого изобретателя М. Шулера, запатентовавшего в 1908 первый практически пригодный гирокомпас.
Варианты системы. В прежних системах инерциальной навигации опорная система координат обеспечивалась установкой акселерометров и гироскопов на стабилизированной платформе в кардановом подвесе. Такой подвес изолировал платформу от поворотов летательного аппарата или судна. Это позволяло удерживать акселерометры в неизменной ориентации относительно Земли при движении объекта.
В современных системах инерциальной навигации применяются компьютеры, следящие за ориентацией акселерометров. Такие системы называются бесплатформенными. Выходные данные гироскопов поступают непосредственно на компьютер, который вычисляет мгновенное направление акселерометров в опорной системе координат и соответствующие корректирующие сигналы.
Инерциальные приборы. Основными приборами системы инерциальной навигации являются акселерометры и гироскопы. Акселерометр наиболее распространенного вида представляет собой чувствительную массу, связанную с корпусом пружиной того или иного рода. Пружина может быть механической, но чаще всего это электрическое (электромагнитное, электростатическое или пьезоэлектрическое) устройство, которое создает противодействующую силу. При отклонении корпуса (относительно массы), вызванном приложенным ускорением, появляется сигнал. Электронный усилитель, усилив этот сигнал, создает соответствующую ускорению противодействующую силу пружины (приложенную к массе), которая в системе обратной связи сводит сигнал рассогласования к нулю (рис. 2).
 Рис. 2. АКСЕЛЕРОМЕТР. Ускорение движения вызывает отклонение чувствительной массы, закрепленной на упругом шарнире. Сигнал датчика отклонения усиливается и создает пропорциональную ускорению противодействующую силу пружины, приложенную к чувствительной массе, тем самым возвращая сигнал датчика к нулевому значению
Рис. 2. АКСЕЛЕРОМЕТР. Ускорение движения вызывает отклонение чувствительной массы, закрепленной на упругом шарнире. Сигнал датчика отклонения усиливается и создает пропорциональную ускорению противодействующую силу пружины, приложенную к чувствительной массе, тем самым возвращая сигнал датчика к нулевому значению
В системах наведения баллистических ракет и космических летательных аппаратов, где точность определения скорости является критически важной, в качестве противодействующей силы ранее использовалась реакция гироскопа, а ускорение автоматически интегрировалось для нахождения скорости. В обычном механическом гироскопе посредством вращающегося ротора, подобного юле, поддерживается фиксированное направление в пространстве. Чтобы прибор был достаточно стабилен для целей инерциальной навигации, должны быть исключены трение и другие возмущающие воздействия. Поэтому огромное значение имеют точные расчеты и тщательность изготовления гироскопических приборов. Тем не менее, основной причиной возникновения ошибки в механическом гироскопе является трение в движущихся частях.
В последнее время механические гироскопы все чаще заменяются оптическими. Последние особенно подходят для бесплатформенных систем инерциальной навигации. Оптические гироскопы основаны на принципе Саньяка, названном по имени французского физика С. Саньяка, который в 1913 построил оптический интерферометр для измерения скорости вращения.
Лазерный гироскоп (рис. 3) представляет собой кольцевой резонатор с тремя или четырьмя зеркалами, расположенными по углам треугольника или квадрата. Два лазерных пучка, генерируемые в самой системе, проходят по резонатору в противоположных направлениях. Интерферируя, они дают картину из светлых и темных пятен. Эта картина сохраняет свое положение в пространстве, и при повороте резонатора (корпуса гироскопа) фотоприемник регистрирует поворот, считая пробегающие по нему пятна.
 Работе лазерного гироскопа вредит обратное рассеяние, т. е. рассеяние лазерного луча на поверхностях зеркал и на молекулах газа, встречающихся на пути луча. Обратное рассеяние нарушает картину пятен таким образом, что она поворачивается вместе с корпусом. Устранение и сведение к минимуму обратного рассеяния требуют высочайшей точности при проектировании и изготовлении лазерных гироскопов. См. также ЛАЗЕР.
Работе лазерного гироскопа вредит обратное рассеяние, т. е. рассеяние лазерного луча на поверхностях зеркал и на молекулах газа, встречающихся на пути луча. Обратное рассеяние нарушает картину пятен таким образом, что она поворачивается вместе с корпусом. Устранение и сведение к минимуму обратного рассеяния требуют высочайшей точности при проектировании и изготовлении лазерных гироскопов. См. также ЛАЗЕР.
Рис. 3. Лазерный гироскоп. Два лазерных луча, генерируемые разрядом между анодами и катодом, распространяются навстречу друг другу в кольцевом резонаторе, образованном зеркалами. Взаимодействуя, лучи дают интерференционную картину в виде системы пятен, по перемещению которой можно определить поворот ротора гироскопа.
Волоконно-оптический гироскоп (рис. 4) действует по принципу интерферометра Саньяка. Свет в нем направляется по замкнутому пути с помощью оптического волновода. Для увеличения длины оптического пути и повышения чувствительности гироскопа оптическое волокно свернуто в спираль. В волоконно-оптическом гироскопе используется внешний лазерный источник света. И здесь обратное рассеяние остается серьезной проблемой.
 Рис. 4. Волоконно-оптический гироскоп. Лазерные лучи распространяются по замкнутому пути, частью которого является свернутое в спираль оптическое волокно. Поворот гироскопа определяется посредством фотоприемника, регистрирующего интерференционную картину пятен, создаваемую лучами.
Рис. 4. Волоконно-оптический гироскоп. Лазерные лучи распространяются по замкнутому пути, частью которого является свернутое в спираль оптическое волокно. Поворот гироскопа определяется посредством фотоприемника, регистрирующего интерференционную картину пятен, создаваемую лучами.
Достоинства и недостатки. Поскольку системы инерциальной навигации автономны, на их работе не сказываются погодные условия. Они не поддаются радиоэлектронному подавлению и обеспечивают скрытность (не генерируют электромагнитного излучения, выдающего присутствие летательного аппарата).
Одним из недостатков систем инерциальной навигации является то, что их необходимо настраивать (выставлять) не только по скорости и местоположению, но и по пространственному положению (ориентации относительно заданной базы, например горизонта). Пространственное положение можно задать, пользуясь акселерометрами для определения направления вертикали и гироскопами для определения вращения Земли. Этими векторами определяются оси опорной системы координат (но только не в том случае, когда объект находится на Южном или Северном полюсе; в этом случае направление вертикали коллинеарно оси земного вращения и система не может определить азимут). Процесс выставки занимает несколько минут или более. Общее правило таково, что чем меньше время выставки, тем ниже чувствительность и точность системы.
Большим недостатком системы инерциальной навигации является то, что ее ошибка со временем накапливается. Это обусловлено интегрирующим действием самой системы. Скорость вычисляется интегрированием ускорения, и постоянная ошибка ускорения преобразуется в непрерывно нарастающую ошибку скорости. Благодаря обратной связи по ускорению свободного падения нарастание ошибки происходит лишь в пределах одного периода колебаний Шулера (84 мин). Однако для баллистических ракет и это много. Кроме того, из-за многочисленных малых погрешностей измерения амплитуда этих колебаний со временем увеличивается. В связи с ошибками гироскопа возникают ошибки направления при измерении кажущегося ускорения и ускорения свободного падения, что тоже приводит к нарастанию дополнительных ошибок.
Вспомогательные навигационные средства. Если накопленная ошибка становится слишком большой, ее можно корректировать с помощью внешних вспомогательных средств. Конечно, тогда система становится неавтономной. К внешним навигационным средствам относятся доплеровские радиолокационные станции, системы астроориентации, радиолокационные средства определения местоположения, навигационные спутники и различные электронные системы наземного базирования («Такан», «Лоран», «Омега»).
Для оптимального использования данных, поступающих от внешних вспомогательных средств, нужно, чтобы тщательно учитывались характеристики и погрешности этих и бортовых навигационных средств. Оптимальное объединение данных разных источников обеспечивает «обобщенный фильтр Калмана», названный по имени американского математика венгерского происхождения Ф. Калмана, опубликовавшего в 1961 свой метод фильтрации. Эта вычислительная процедура представляет собой алгоритм, допускающий компьютерную реализацию. Он применяется почти во всех инерциальных навигационных системах. См. также АЭРОНАВИГАЦИЯ; АВИАЦИОННЫЕ БОРТОВЫЕ ПРИБОРЫ; ГИРОСКОП; НАВИГАЦИЯ
Астрономическая навигация (Астронавигация)
Астрономическая навигация - метод определения координат судов и летательных аппаратов, основанный на использовании радио - или светового излучения небесных светил.
Астронавигационная система
Астронавигационная система - электронно-вычислительная судовая система, предназначенная для автоматического измерения высот небесных светил, их азимутов и выдачи по этим данным обсервованных координат местоположения судна.
Астрономические средства навигации
Астрономические средства навигации - технические устройства и системы для решения навигационных задач с использованием радио - и светового излучения небесных светил
В настоящее время почти полностью вытеснена спутниковыми системами навигации. Тем не менее её продолжают изучать в профильных учебных заведениях, так как предполагается, что в случае большой войны навигационные спутники и другие технические средства могут быть уничтожены, и тогда астрономия снова станет единственным надёжным средством определения координат.
2.1.2 Астрономическая навигация
(от лат. navigo – плыть по морю)
Астрономическая навигация позволяет ориентироваться на местности на основе сведений о положениях светил на небе в любой момент времени.
Ночью широта места определяется по высоте Полярной звезды над горизонтом, а долгота – по моментам восхода, кульминации светил или их захода. Днем широта определяется по высоте Солнца над горизонтом в момент его верхней кульминации. Долгота же рассчитывается по разнице во времени между этим событием и полуднем в пункте с известной долготой. Для этого используются хронометры, сохраняющие текущее время этого географического пункта.
НАВИГАЦИЯ, раздел науки о способах проведения морских, воздушных судов и космических летательных аппаратов из одной точки пространства в другую. Эта задача решается методами и приборами мореходной, воздушной и космической навигации, которые позволяют определить местоположение и ориентацию движущегося объекта относительно принятой системы координат, величину и направление скорости движения, направление и расстояние до места назначения и т. д. Наиболее современные методы навигации – астрономические и радиотехнические. См. также АЭРОНАВИГАЦИЯ; КОМПАС; СЕКСТАНТ.
АСТРОНОМИЧЕСКИЕ МЕТОДЫ НАВИГАЦИИ
Астрономические методы навигации основаны на определении положения известных небесных светил относительно выбранной системы координат. Эти методы реализуются при помощи астрономических оптических и оптико-электронных навигационных приборов. Для астронавигационных приборов характерны автономность измерения, ограничиваемая только видимостью небесных светил (в приземной области), и высокая точность определения координат места, не зависящая от длительности, дальности, высоты и скорости движения. Поскольку основная задача навигации заключается в проведении объекта по заданной траектории в заданное время, учет хода времени является обязательной составной частью навигационных измерений.
Небесная сфера. Положение светил на небе определяется аналогично тому, как определяется положение точки на земной поверхности, – долготой и широтой. Вводится вспомогательная небесная сфера с центром в центре Земли, и все светила проецируются на нее. Принимается, что все светила расположены на этой сфере, вращающейся вокруг Земли. Небесный экватор рассматривается как проекция земного экватора на небесную сферу, и точно так же получаются Северный и Южный полюсы мира – как проекции земных полюсов.
НЕБЕСНАЯ СФЕРА, отсчет углов.
Широта на небесной сфере называется склонением и может быть северной или южной относительно экватора, как и на Земле. Небесная долгота выражается звездным часовым углом (ЗЧУ), гринвичским часовым углом (ГЧУ) или местным часовым углом (МЧУ) светила. См. также НЕБЕСНАЯ СФЕРА.
Небесные часовые углы. Небесный меридиан, проходящий через точку весеннего равноденствия, называемую также первой точкой Овна (![]() ), считается нулевым. ЗЧУ светила отсчитывается к западу от нулевого небесного меридиана в пределах от 0 до 360° и указывается в угловых градусах.
), считается нулевым. ЗЧУ светила отсчитывается к западу от нулевого небесного меридиана в пределах от 0 до 360° и указывается в угловых градусах.
Поскольку небесная сфера равномерно вращается вокруг Земли с востока на запад, всякая задача астронавигации требует соотнесения часового угла наблюдаемого светила с нулевым, т. е. гринвичским, меридианом на Земле. Угол между гринвичским меридианом и светилом называется гринвичским часовым углом светила. ГЧУ тоже измеряется к западу от 0 до 360°.
Местный часовой угол (МЧУ) светила есть угол между небесным меридианом наблюдателя и положением светила. МЧУ всегда измеряется в градусах к западу от меридиана наблюдателя. Чтобы найти МЧУ светила, нужно из его ГЧУ вычесть гринвичский угол наблюдателя. Если результат оказывается отрицательным, то нужно абсолютную величину этого результата вычесть из 360°. Следует учитывать, что долгота на Земле измеряется также к востоку от гринвичского меридиана до 180°.
Приборы. Географические координаты места объекта можно определить, измерив высоты двух светил над горизонтом. Вычисления координат могут осуществляться оператором или автоматическими астронавигационными системами. Высота же светила измеряется секстантом. Авиационные секстанты снабжаются искусственным горизонтом в виде жидкостного уровня (или гироскопа). После определения по шкале секстанта высоты светила над горизонтом вносятся небольшие поправки на погрешность градуировки прибора и на параллакс – отклоняющее действие земной атмосферы на проходящий сквозь нее свет. В авиационных секстантах предусматриваются автоматическая регистрация показания по завершении визирования, а также усреднение показаний в процессе быстрого многократного визирования. Космические секстанты на один-два порядка величины точнее морских и авиационных.
Линии положения. Визированием небесного светила навигатор может определить лишь линию, проходящую через его местоположение. Чтобы определить свои координаты места, ему нужно визировать второе светило и установить вторую линию положения. Тогда его местоположение будет представлено точкой пересечения этих двух линий. Однако эти измерения не дают навигатору точных координат места. При визировании светила он принимает собственную оценку этих координат. Вычислив МЧУ визированного им небесного светила, навигатор с учетом склонения и часового угла последнего, пользуясь специальными таблицами, может вычислить высоту рассматриваемого небесного светила в предположении, что он находится в принятой им точке. Разность вычисленной высоты и измеренной при визировании секстантом укажет ему величину и направление смещения истинного местоположения от принятой точки. Каждая угловая минута этой разности соответствует одной морской миле (1,85 км).
РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ НАВИГАЦИИ
Радиоэлектронные системы навигации, история которых начинается со времен Второй мировой войны, позволяют бортовым приборам быстро и автоматически определять и указывать местоположение, а при необходимости и скорость, в любых погодных условиях. В наши дни многие такие системы, созданные в военных целях, обслуживают и гражданских пользователей.
Авиационные системы посадки. Международная система такого рода – так называемая система посадки по приборам (ILS). Это микроволновая передающая система, которая сигналами трех радиомаяков указывает пилоту отклонение по курсу и глиссаде от стандартной траектории захода на посадку (см. также АЭРОПОРТ; СВЕРХВЫСОКИХ ЧАСТОТ ДИАПАЗОН). Система ILS допускает заход на посадку только по прямой, а возможности пользования ею зависят от местных условий распространения сигнала. Эти недостатки устранены в разработанной позднее СВЧ-системе обеспечения посадки MLS. Она менее чувствительна к местным условиям, способна обслуживать кратное прибытие и может задавать переменные схемы захода. Криволинейные пути захода на посадку снижают уровень шума в некоторых аэропортах.
Радиолокация. Радиолокационная навигация имеет особенно важное значение для судоходства в прибрежных водах. Радиолокация заменяет зрение штурману в тумане и ночной темноте. Индикатор кругового обзора (ИКО) показывает положение судна на фоне изображения карты местной зоны. Указывая также положение других судов и суши, радиолокатор позволяет избежать столкновений.
Радиолокация применяется и в воздушной навигации. Доплеровское навигационное устройство тремя или четырьмя узкими радиолучами СВЧ-антенн сканирует землю в разных направлениях. На основе эффекта Доплера вычисляется путевая скорость воздушного судна, а интегрированием скорости определяется его местоположение. См. также ДОПЛЕРА ЭФФЕКТ.
Наземные радиолокационные станции служат основой современного управления воздушным движением. Радиолокация позволяет также измерять высоту, что дает возможность определять координаты самолета в трех измерениях. См. также РАДИОЛОКАЦИЯ; ВОЗДУШНЫМ ДВИЖЕНИЕМ УПРАВЛЕНИЕ.
Радиомаяки. Пеленгаторная антенна судна может определять направление на радиомаяк, сигнал которого она принимает. Сигнал радиомаяка содержит позывной код, по которому можно установить местоположение маяка. Отсчитывая курс по компасу, штурман проводит линию положения (см. выше). Точкой пересечения двух таких линий определяются координаты судна.
Точность пеленгации по радиомаякам невелика на большом удалении от них, но приемлема – на малом. Преимуществом ручных пеленгаторных приемников (радиополукомпасов) является их дешевизна. В авиации обычно применяются автоматические радиопеленгаторы, или радиокомпасы.
Системы измерения азимута и расстояния. Оборудование этой категории дает основную маршрутную информацию для воздушной навигации. Зная азимут известной наземной радиостанции, пилот может держать на нее курс и при этом видеть на индикаторе расстояние до нее. Перестраиваясь с одной станции на другую, он может проследовать «вслепую» в любую точку назначения.
Информацию об азимуте дает всенаправленный курсовой радиомаяк УКВ-диапазона VOR (VHF Omnidirectional Range). Радиомаяк VOR передает два сигнала, разность фаз которых является прямой мерой его азимута относительно направления на север, причем показания компаса не требуются. ВВС и ВМФ США разработали другую систему определения азимута как часть своей радионавигационной системы ближнего действия «Такан» (TACAN – Tactical Air Navigation). Погрешность (стандартное отклонение) системы VOR немногим меньше 1°, а погрешность системы «Такан» – около 0,5°.
Гражданские и военные радиомаяки США используют однотипное дальномерное оборудование DME (Distance Measuring Equipment). Расстояние от пользователя до радиомаяка определяется по измеренному времени, за которое сигнал пользователя доходит до радиомаяка, вызывает срабатывание ответчика (принимающего, усиливающего и снова передающего сигнал) и возвращается обратно. Время измеряется как интервал между переданным и принятым импульсами. Точность определения расстояний – около 400 м. В тех случаях, когда одно и то же оборудование DME используется для радиомаяков VOR и TACAN, система обозначается аббревиатурой VORTAC.
Точные измерения изменений дальности за малые интервалы времени лежат в основе наземного слежения за космическими летательными аппаратами. На станциях слежения используются большие антенны и атомные часы (в качестве стандартов частоты). Изменения дальности определяются по изменению фазы сигнала, пришедшего от бортового ответчика КЛА.
Гиперболические системы. Гиперболическая радионавигационная система дает линии положения, которые представляют собой гиперболы. Радиодальномерные системы определяют координаты в направлении на источник сигнала точнее, чем в поперечном направлении. В гиперболических системах для измерения расстояния используются радиосигналы без применения ответчика. Если ответчик может обслуживать одновременно лишь небольшое число пользователей, то число пользователей гиперболической системы не ограничено. Для измерения дальности передающей станции необходимо, как говорилось выше, очень точными (и дорогостоящими) часами измерять время прохождения сигнала. В гиперболических системах необходимость в дорогостоящих часах устранена благодаря тому, что измеряется разность времен прихода сигналов от двух разнесенных в пространстве наземных радиостанций. По этой разности вычисляется разность расстояний до радиостанций. Линии с одинаковой разностью времен прихода сигналов от каждой пары радиостанций представляют собой гиперболы на плоскости и близки к гиперболам на поверхности Земли. Точка пересечения гипербол соответствует местоположению судна.
Из гиперболических радионавигационных систем наиболее широко применяется импульсно-фазовая разностно-дальномерная система «Лоран-С» (LORAN – Long Range Navigation). Она принята в качестве стандартной радионавигационной системы для судоходства в прибрежных водах США. Ее радиостанции обеспечивают хороший охват восточного побережья США, Мексиканского залива и западного побережья до южной части Аляски. Работая на низких частотах, эта система использует т. н. земную радиоволну, которая огибает поверхность Земли и поэтому в своем распространении не ограничена пределами прямой видимости. Сигналами системы можно пользоваться в радиусе около 2000 км от ее станций, и в большинстве охватываемых зон она обеспечивает точность около 500 м. Приемники системы «Лоран-С» устанавливаются также на многих военных самолетах и на самолетах гражданской авиации общего назначения.
Разностно-дальномерная система «ЛОРАН-С», стандартная радионавигационная система для гражданских судов США в прибрежных водах. Наземные радиостанции, показанные темными кружками, обеспечивают хороший охват зон (оттенены) вдоль восточного побережья США, в Мексиканском заливе и вдоль западного побережья до южной Аляски.
В международном масштабе применяется также фазовая гиперболическая радионавигационная система «Омега» (OMEGA). Ее основным отличием от системы «Лоран» является низкая рабочая частота и соответственно этому повышенная дальность действия. Глобальный охват обеспечивается восемью радиостанциями. Однако из-за большой рабочей длины волны (соответствующей низкой частоте) погрешность определения координат выше – около 3 км.
«ОМЕГА», радионавигационная система, обеспечивающая глобальный охват восемью радиостанциями, расположенными в разных частях света.
Инерциальные навигационные системы. Недостатком всех радиотехнических методов навигации является то, что на передаваемый и принимаемый радиосигнал могут налагаться естественные и искусственно создаваемые радиопомехи. В военной технике необходимы автономные средства навигации, которые не требовали бы внешних сигналов, а потому и не боялись бы радиоэлектронного подавления. Этим условиям отвечает т. н. инерциальная навигация. См. ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
