
Доплеровскому сдвигу частоты fD = fT – fR соответствуют поверхности положения в виде конусов. Вершины конусов совпадают с положениями спутника (S1, S2, S3 на рис. 2.15), осями конусов являются векторы полной скорости V1, V2, V3. Угол раствора конуса равен углу между векторами полной и лучевой скорости.
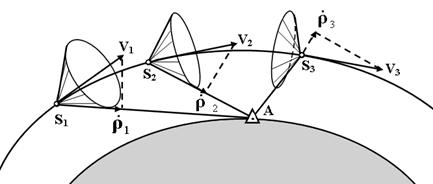
Рис. 2.15. Позиционирование по лучевой скорости.
Поскольку
![]() ,
,
то дифференцирование этого уравнения по времени дает:
![]() . (2.11)
. (2.11)
Здесь точка над символом координаты означает первую производную по времени, а разности скоростей пункта и спутника представляют собой компоненты вектора лучевой скорости:
![]() . (2.12)
. (2.12)
Из уравнения (2.9) видно, что для определения координат XA, YA, ZA необходимо иметь не менее трех таких уравнений, в которых должны быть известны и положения спутников ri = (Xi, Yi, Zi)T, и относительные скорости ![]() ,
, ![]() ,
, ![]() . Для этого производится интегрирование радиальной скорости
. Для этого производится интегрирование радиальной скорости ![]() на некотором интервале времени Dt:
на некотором интервале времени Dt:
 . (2.13)
. (2.13)
В результате образуются разности дальностей для одного и того же спутника, но в различные моменты времени. Если пренебречь перемещением наблюдателя за время Dt, то из (2.13) следует:
 (2.14)
(2.14)
Отсюда получается, что, зная координаты спутника i в моменты t и t+Dt и производя измерения Dr, можно определять координаты пункта A.
2.5.5 Позиционирование по псевдодальностям
Разнообразие возможных способов спутникового позиционирования представляет по существу различные методы для учета погрешностей в измерениях. Рассмотрим смещения в расстояниях как влияния на наблюдения инструментального (или «внутреннего») характера или происходящие от самой системы (или «внешнего» характера), которые вызывают в измеренном расстоянии отличия от истинного расстояния на систематическую величину (т. е. это систематические погрешности).
Имеются различные типы смещений, но в центре внимания должны быть те смещения, которые имеют следующие хорошо определенные характеристики:
- смещения в дальностях, которые одинаково воздействуют на все измерения, сделанные на наземной станции – это смещения, зависящие от станции;
- смещения в дальностях, которые одинаково воздействуют на все измерения, сделанные по отдельному спутнику, - это смещения, зависящие от спутника;
- смещения в дальностях, которые являются уникальными для отдельного наблюдения спутник-приемник – это смещения, зависящие от наблюдения.
В случае ГЛОНАСС/GPS измерений, источники смещений могут быть в основном участвовать в вышеупомянутых трех категориях. Преобладающие смещения происходят из-за часов спутника и станции, и из-за геометрического характера высокоточных измерений. Они имеют следующие дополнительные особенности:
- ошибки часов станции и спутника искажают соответствующие измерения на одну и ту же величину.
- наблюдения, зависящие от неоднозначности в фазе несущей, предполагаются постоянными в течение всего периода непрерывных наблюдений.
Измеренные до спутников дальности, содержащие смещения, часто называют псевдодальностями.
Дальности, смещенные приемником. Шкалы часов спутника и приемника в момент измерений не являются синхронизированными. В один и тот же момент времени t часы приемника и спутника показывают разные отсчеты TA и Ti, которые необходимо исправлять соответствующими поправками часов:
 . (2.15)
. (2.15)
Предположим, что на расстояние спутник-приемник воздействует только ошибка часов dtA, вызванная генератором приемника A. Тогда соотношение между измеренной дальностью P и истинной дальностью r в момент приема сигнала t имеет вид:
![]() , (2.16)
, (2.16)
где с – скорость электромагнитного излучения. Отметим временную зависимость дальности и ошибки часов, поэтому они сопровождаются указанием времени приема. Это подразумевает, что если часы приемника отстают (положительная величина dt в уравнении (2.16)), то измеренная дальность оказывается слишком большой, а если часы приемника идут впереди, то измеренное расстояние оказывается короче.
Если измерения сделаны одновременно на несколько спутников Si (i=1, 2, …s), то хотя время передачи сигналов различно для каждого спутника (и, следовательно, время прохождения), они все будут смещены на одну и ту же величину c×dtA. Можно образовать следующий ряд уравнений наблюдений:
 (2.17)
(2.17)
где s – число наблюдаемых спутников. Эту ситуацию иллюстрирует рис. 1.16.
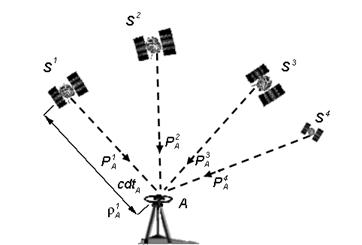
Рис. 2.16. Позиционирование по дальностям, смещенным приемником (Р – псевдодальность, r - геометрическая дальность).
Если предположить, что координаты передатчика ![]() (наземного или спутникового базирования) известны, то каждое измерение псевдодальности
(наземного или спутникового базирования) известны, то каждое измерение псевдодальности![]()
![]() содержит четыре неизвестных параметра: трехмерные координаты приемника RA=(X, Y, Z)T и ошибку (поправку) часов приемника dtA. Если сделано четыре измерения на четыре различных объекта, то можно образовать следующую систему уравнений (моменты времени опущены):
содержит четыре неизвестных параметра: трехмерные координаты приемника RA=(X, Y, Z)T и ошибку (поправку) часов приемника dtA. Если сделано четыре измерения на четыре различных объекта, то можно образовать следующую систему уравнений (моменты времени опущены):
 (2.18)
(2.18)
При числе измерений s³4 эта система уравнений имеет единственное решение. Если измерений сделано больше чем четыре, то чтобы получить оптимальное решение может использоваться метод наименьших квадратов. Этот метод обеспечивает в дополнение к определению неизвестных параметров оценку качества позиционирования. Подробнее решение этой системы уравнений будет рассмотрено в главе 9.
Позиционирование по псевдодальностям является стандартным способом, применяемым в навигации по спутникам GPS и ГЛОНАСС, в котором с ошибкой часов приемника обращаются как с дополнительным неизвестным. Все другие смещения принимаются незначительными (то есть их воздействие на качество решения положения считается незначительным). Ошибки часов спутников могут рассматриваться как известные величины, а параметры для исправления этого смещения передаются в навигационном сообщении (глава 5).
Нужно ли находить ошибку часов приемника в каждую эпоху? Это зависело бы от того:
- насколько хорошо оценивается ошибка часов,
- как часто выполняются определения положений,
- качество часов.
Если приемник оборудован кварцевыми часами, нестабильность хода которых около 10-6, то в этом случае неопределенность их показаний после 30 секунд работы такая же большая, как ошибка в измерении дальности. Ясно, что как только ошибка часов определена, ее необходимо независимо оценивать, по крайней мере, каждые 30 секунд, иначе она будет доминировать в ошибке дальности. По этой причине метод нельзя использовать, если измерения делаются не одновременно по всем передатчикам. Фактически часы приемника можно регулярно «переустанавливать» на его «истинное» время, так, чтобы дрейф часов (и последующее зашумление измерений дальностей) было ограничено, как схематически показано на рисунке ниже.
Рис. 2.17. Дрейф часов и их периодическая переустановка.
Альтернативой к рассмотренной схеме использования смещенных дальностей является метод разностей, образуемых между спутниками. Можно, например, из каждого уравнения системы (2.18) вычесть первое уравнение, тогда будет получена новая система уравнений:
 (2.19)
(2.19)
Возможны другие схемы образования разностей между спутниками, важно, чтобы они были независимыми. Эти уравнения наблюдений можно линеаризовать и получить оценку трехмерных координат. Это решение эквивалентно явной оценке ошибки часов как дополнительного параметра (те же самые компоненты трехмерных координат и ковариационная матрица).
Дальности, смещенные спутником. Предположим, что на расстояние спутник-приемник воздействует только ошибка часов dti, связанная с генератором i-го спутника. Соотношение между измеренным Р и «истинным» расстоянием r имеет вид:
 , (2.20)
, (2.20)
где ![]() - время прохождения сигнала от спутника до приемника.
- время прохождения сигнала от спутника до приемника.
Здесь дальности и ошибка часов зависят от времени, но измерения отмечены временем приема, а ошибка часов спутника - временем передачи ![]() . Это подразумевает, что если часы спутника отстают (положительная величина dti), то измеренное расстояние будет короче, а если часы спутника идут впереди, то измеренное расстояние будет слишком большое.
. Это подразумевает, что если часы спутника отстают (положительная величина dti), то измеренное расстояние будет короче, а если часы спутника идут впереди, то измеренное расстояние будет слишком большое.
Если измерения сделаны одновременно несколькими наземными приемниками, то, поскольку время прохождения сигнала будет разным, то и время передачи сигналов должно быть различным, а измерения будут слегка смещены на разные значения. Насколько существенно различие в моментах передачи сигналов? При разности расстояний от спутника до двух приемников в 1000 км разность во времени прихода сигнала будет порядка 0.003 с. Если генератор спутника имеет цезиевый стандарт, относительная нестабильность которого порядка 5×10-11, то за время в 0.003 с ошибка часов может измениться на 3×10-12 с, что примерно эквивалентно одному миллиметру в расстоянии. Ясно, что это пренебрежимо мало, и, следовательно, можно предполагать, что ошибка часов спутника одинаковая, даже для очень далеко отстоящих приемников.
Если принять, что координаты спутникового передатчика сигнала (Xi, Yi, Zi) известны, то в уравнении (2.20) имеется шесть неизвестных: трехмерные координаты приемника (XA, YA, ZA) и ошибка часов спутника dti. Каждое наблюдение нового спутника будет давать дополнительное неизвестное (ошибку часов спутника), и система уравнений всегда будет иметь дефект ранга, равный трем.
Чтобы решить эту проблему определения координат неизвестного пункта, необходимы наблюдения не менее чем трех спутников одновременно с двух пунктов, причем у одного из них координаты должны быть известны. Для двух приемников, расположенных в пунктах A и В, и одновременно наблюдающих спутники i, j, k имеем (временные аргументы опущены):
 (2.21)
(2.21)
Если координаты пункта B известны (XB, YB, ZB), то можно получить разности между псевдодальностями, измеренными приемниками по одному и тому же спутнику:
 (2.22)
(2.22)
Это три независимых разности «между приемниками», в которых исключены три ошибки часов спутников. Для решения можно эту модель привести к линейному виду и получить трехмерные координаты пункта A. Если число спутников больше трех, то решение выполняется по методу наименьших квадратов. Это решение было бы эквивалентным (те же самые трехмерные координаты и компоненты ковариационной матрицы) явному оцениванию ошибок часов как дополнительных параметров в уравнении (2.20).
Дальности, содержащие неоднозначности фазы. Предположим, что каждое измерение, сделанное приемником на спутник неоднозначно из-за того, что можно измерять только дробную часть длины волны. Такое измерение должно моделироваться как:
![]()
где ![]() – смещение, специфичное для пары приемник A - спутник i, P - измеренное расстояние, а r - истинное расстояние. Заметим, что в
– смещение, специфичное для пары приемник A - спутник i, P - измеренное расстояние, а r - истинное расстояние. Заметим, что в ![]() нет зависимости от времени. Каждое наблюдение, сделанное приемником, можно представить как модификацию уравнения (2.16). Представив истинное расстояние через координаты спутника и приемника, получаем:
нет зависимости от времени. Каждое наблюдение, сделанное приемником, можно представить как модификацию уравнения (2.16). Представив истинное расстояние через координаты спутника и приемника, получаем:
![]() . (2.22)
. (2.22)
Если предположить, что приемником одновременно наблюдаются три спутника, то-есть i = 1, 2, 3, то тогда в полученной системе уравнений будет шесть неизвестных: трехмерные координаты приемника (XА, YА, ZА) и три члена смещения (![]() ). Поэтому, чтобы решить проблему позиционирования требуется наблюдать не менее шести расстояний, имеющих постоянные смещения от неоднозначностей, при этом нужно помнить, что каждый новый спутник будет вводить новый параметр неоднозначности. Однако можно воспользоваться тем преимуществом, что все наблюдения, сделанные с определенного приемника до отдельного спутника, смещены на одну и ту же величину N. Если сделано больше трех наблюдений от приемника до тех же самых трех спутников но на промежуток времени Dt позднее, то можно получить систему из шести уравнений с шестью неизвестными:
). Поэтому, чтобы решить проблему позиционирования требуется наблюдать не менее шести расстояний, имеющих постоянные смещения от неоднозначностей, при этом нужно помнить, что каждый новый спутник будет вводить новый параметр неоднозначности. Однако можно воспользоваться тем преимуществом, что все наблюдения, сделанные с определенного приемника до отдельного спутника, смещены на одну и ту же величину N. Если сделано больше трех наблюдений от приемника до тех же самых трех спутников но на промежуток времени Dt позднее, то можно получить систему из шести уравнений с шестью неизвестными:
 (2.23)
(2.23)
Для системы (2.23) можно получить единственное решение, если приемник между моментами t и t+Dt не перемещался.
Можно также вычесть наблюдения с одного и того приемника на тот же самый спутник, но сделанные в различные эпохи:
 (2.24)
(2.24)
В системе (1.24) представлены три независимых разности псевдодальностей между эпохами, в которых исключены три постоянных смещения между спутником и приемником. Эту модель необходимо привести к линейному виду и получить оценки для трехмерных координат. Решение будет эквивалентным (те же координаты и ковариационные матрицы) явному оцениванию смещений как дополнительных параметров в уравнении (2.23).
Сводка замечаний. Выбор методики решений для различных видов смещенных расстояний зависит от того, чем вызвано смещение, изменяется ли оно со временем и т. д. В таблице 2.1. приведена сводка возможных подходов к решению задачи позиционирования.
Таблица 2.1. Виды смещений в псевдодальностях и особенности методики позиционирования.
Характеристика смещения и способы его исключения | Источник смещения | ||
Часы приемника | Часы спутника | Неоднознач-ность фазы | |
Изменяется со временем. | Да | Да | Нет |
Необходимо наблюдать много спутников. | Да | Нет | Нет |
Необходимо наблюдать многими приемниками. | Нет | Да | Нет |
Необходимо наблюдать в течение многих эпох. | Нет | Нет | Да |
Из представленной таблицы можно сделать следующие заключения.
Если в измерениях присутствует только смещение от часов приемника, то способ требует, чтобы наблюдалось одновременно несколько спутников. В случае задачи трехмерного позиционирования минимальное число спутников, которые нужно наблюдать, равно четырем. Это гарантирует возможность позиционирования в реальном масштабе времени, и является основой для позиционирования точки (точечное или абсолютное позиционирование), используемого в навигации. Этот способ обычно используется для позиционирования движущегося приемника, чтобы сохранить уровень точности.
Если на измерения расстояний воздействуют смещения и от приемника, и от спутника, то для позиционирования необходимо одновременно наблюдать множество спутников двумя или более приемниками и получать дифференциальное положение. При использовании для GPS навигации этот способ называют как дифференциальный навигационный способ, поскольку в нем по существу мгновенно происходит определение координат, и его можно применять в реальном масштабе времени, если между приемниками существует связь.
Если в измерениях расстояний присутствуют смещения всех трех видов, то требуются продолжительные наблюдения в виде «сеанса» («сессии») (а также множество спутников, наблюдаемых прослеженные одновременно двумя или более приемниками), чтобы «разрешить» смещение от неоднозначности. Это обычный способ геодезических спутниковых измерений по фазе несущей [Болдин и др. 1999; Rizos 1999].
2.1.4 2.6 ОСОБЕННОСТИ ПРОЕКТА СПУТНИКОВЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ
2.1.5 2.6.1 Выбор основных концепций СРНС
За успехом систем первого поколения Transit и Цикада последовали программы навигационных систем космического базирования второго поколения. Полезно рассмотреть доводы, которые привели к выбору архитектуры системы.
Система пассивная или активная: пассивная система передает сигналы, а пользователь определяет свое положение просто «слушая» их. Активная система взаимодействует с каждым пользователем (то-есть, пользователю может потребоваться запросить систему). Активная система может работать с фиксированным, конечным числом пользователей. Кроме того, военный пользователь может не желать выдавать свое положение при излучении сигналов.
Метод позиционирования: доплеровский, гиперболический или трилатерация. В 1970-е годы технология часов была улучшена до уровня, при котором синхронизированные сигналы можно было бы передавать со спутников. Логическим выбором стала трилатерация. Поэтому о GPS и ГЛОНАСС говорят как о пассивных дальномерных системах.
Импульсные сигналы или непрерывная волна. Импульсные сигналы могут согласовываться со временем, чтобы каждый спутник имел свое время передачи. Использование сигналов широкого спектра позволяет производить одновременную передачу сигналов на одной радио частоте. Система GPS представляет собой первое серьезное применение этого использования сигналов, называемое концепцией множественного доступа с разделением по кодам (CDMA). В системе ГЛОНАСС было выбрано разделение сигналов по частоте (FDMA), то-есть каждый спутник ведет передачи на своей частоте.
Частота несущих колебаний: компромисс был установлен на L-диапазоне. Для системы GPS необходима полоса спектра в 20 МГц, а L-диапазон был сравнительно не шумный в начале 1970-х (но не позднее). На более высоких частотах ошибка расстояния из-за ионосферы уменьшается, но пространственные потери (затухание сигнала из-за пройденного расстояния) и атмосферное затухание увеличиваются.
Отмечаются еще четыре технологии, которые предопределили выбор трилатерации в качестве метода позиционирования в современных навигационных системах, это:
- стабильные космические платформы на предсказуемых орбитах,
- стабильные генераторы частоты (часы),
- использование сигналов широкого спектра,
- интегральные схемы.
Напомним, что трилатерация требует измерения расстояний до трех объектов с известными положениями. В современных СРНС объектами на известных положениях являются спутники, которые движутся в космическом пространстве со скоростью около 4 км/с. Тем не менее, положение спутника в любой момент можно оценить с погрешностью не хуже, чем несколько метров, основываясь на предсказаниях, сделанных ранее за 1 – 2 суток. Расстояние между приемником и спутником измеряется по времени прохождения сигнала от спутника к пользователю. Точное измерение времени прохождения выполняется по передаваемым сигналам с точными временными отметками в соответствии с почти постоянными и постоянно синхронизируемыми часами, установленными на борту спутника. Точность этих отметок обеспечивается посылаемыми сигналами с широкой полосой пропускания (сигналы с широким спектром). Наконец, достижения в электронике позволяют сделать этот приемник легким, компактным и не слишком дорогим.
Чтобы получить истинное время прохождения сигнала от спутника до приемника, часы на спутнике и в приемнике должны быть синхронизированными. К счастью, это тяжелое требование можно легко обойти, если в приемнике использовать недорогой кварцевый генератор. Смещение шкалы часов приемника в момент измерений влияет на наблюдаемое время прохождения одинаково для всех спутников. Соответствующие измеренные расстояния оказываются все одинаково либо слишком короткими, либо слишком длинными, поэтому их принято называть псевдодальностями. Поэтому смещение часов приемника становится четвертым неизвестным, подлежащим определению, в дополнение к трем координатам положения. Для этого пользователю необходимо иметь зоне видимости не менее четырех спутников.
2.1.6 2.6.2 Учет требований пользователей системы
1. Система должна удовлетворять как военным, так и гражданским пользователям:
- точность от десятков метров до миллиметров,
- система должна давать и координаты, и скорость, и время одинаково хорошо,
- система должна обеспечивать пользователей на земле, на воде, в воздухе и в космосе.
Для этого не нужно изменять основные конфигурации системы или режимы ее работы. Это важно для оправдания огромной стоимости системы.
2. Низкая стоимость и простота операций. Отсюда следует минимальная сложность операций при обращении к системе, компактная и легкая аппаратура с низким энергопотреблением. Это важно также для того, чтобы система была принята геодезистами по всему земному шару.
3. Неограниченный доступ для всех пользователей: очень важна привлекательность выполнения технологий позиционирования. Для этого система должна обеспечивать глобальный охват в течение 24 часов в сутки и быть всепогодной.
4. Удовлетворять требованиям военных к определению положений, таким как:
- удобство для всех видов носителей в воздухе (от ракеты до вертолета), на море, на земле (и для судов, и для ручного применения), и в космосе (на снарядах или спутниках),
- позиционирование в реальном времени, возможность определять скорость и время,
- результаты должны получаться в единой системе координат,
- уровень точности в реальном времени должен быть контролируемым невоенными пользователями,
- устойчивость к помехам и другим последствиям неблагоприятных условий,
- независимость системы от пользователя, следовательно, отсутствие требований по передаче каких-либо дополнительных сигналов.
Важность военных применений является одним из сильнейших факторов при обсуждении и принятии решений по разработке спутниковых навигационных систем.
Выполнение приведенных выше требований подразумевает:
- спутники должны размещаться на подходящих орбитах, чтобы они могли обслуживать как можно больше пользователей в любом месте на Земле,
- система опорных координат, к которой относятся координаты спутников, определяется операторами системы,
- после замены наземных геодезических опорных пунктов на спутники хорошо отработанные методы классических измерений и навигации могут стать неверными,
- определение положения обычно производится в трехмерной системе координат на основе геометрических принципов построения сетей, в то время как в геодезии производится раздельное определение плановых координат и высот на основе физических принципов измерений (относительно геоида),
- координаты опорных станций, вращающихся на орбитах, изменяются со временем (и должны постоянно обновляться),
- на качество определения положения влияют ошибки в координатах спутников (в эфемеридах), и в самих измерениях,
- опорные пункты, вращающиеся на орбитах, невидимы для пользователя,
- пользователи не должны иметь прямую заинтересованность в системе (или в контроле над ней).
Все спутниковые системы разрабатываются, поддерживаются и контролируются одним государством (обычно министерством обороны страны):
- система управления подчиняется военному министерству одной страны и влияние большинства пользователей незначительное,
- решения об изменениях в системе координат делаются, как правило, без учета мнения пользователей,
- если система управления противопоставляется определенному классу пользователей (например, по политическим мотивам), то для таких пользователей могут вводиться ограничения в доступе к системе или к ее работе.
Военные пользователи используют все возможности СРНС, гражданские пользователи (и GPS, и ГЛОНАСС) в некоторой степени ограничены, например, в использовании точных дальномерных кодов.
2.6.3 Развертывание спутниковой системы
Есть важная особенность в замене сотен тысяч наземных геодезических опорных пунктов (разделенных расстояниями от нескольких километров до тысяч километров) на «вращающиеся вокруг Земли опорные пункты»:
- чтобы обеспечить глобальную 24-часовую службу, необходимо развернуть созвездие спутников. Однако, поскольку спутники дорогие, их полное число должно быть минимальным,
- хороший охват территории дает большая высота спутников, но геометрия спутник-земля может быть слабой, если не делать наблюдения на очень больших расстояниях,
- малая высота спутников потребует много спутников, чтобы обеспечить 24-часовой охват. Кроме того, спутники будут проходить над станциями с большой скоростью и будут наблюдаться в короткие периоды,
- необходим компромисс в отношении высоты полета, так как это прямо влияет на доступность системы пользователем,
- чтобы гарантировать надежность, избыточность в системе, в каждый момент времени должно быть больше спутников, чем минимально необходимо пользователю.
Выбор орбитальной группировки и типов орбит основан на следующих соображениях: каждому пользователю, чтобы определить свое положение, необходимо иметь над горизонтом четыре спутника (или более). Удовлетворение такого требования по всему земному шару необходимо выполнять экономически эффективно. Выбор орбит определяет конструкцию спутника, число спутников, стоимость запуска и эксплуатации.
Низковысотные околоземные орбиты (LEO) с высотой не более 2000 км обеспечивают видимость в пределах 10-20 минут, и приемник должен постоянно захватывать сигналы новых спутников. Радиальная скорость и доплеровский сдвиг очень большие. Возмущения в орбитах от атмосферы также очень большие и трудно предсказуемые. Чтобы обеспечить навигацию в глобальном масштабе потребуется орбитальная группировка из 100-200 спутников. Положительные свойства для средневысотных орбит – меньшая стоимость запуска и меньшая мощность (и стоимость) передатчиков, устанавливаемых на спутниках.
Средневысотные орбиты (MEO) при высотах 5000 – 20000 км и 2 – 4 оборотах за сутки, когда спутники видны на каждом пункте несколько часов при каждом прохождении. Запуск обходится дороже, чем для низковысотных спутников, но глобальный охват решается с помощью 24 – 36 спутников.
Спутники с геостационарными орбитами (GEO) имеют высоту 36000 км, они вращаются в плоскости экватора со скоростью вращения Земли, зависнув над некоторой точкой поверхности. Глобальный охват можно обеспечить малым числом спутников. Отрицательные особенности геостационарных спутников – плохое обслуживание высоких широт (за полярным кругом) и высокая стоимость запусков [Misra and Eng 2001].
Этим соображения привели к выбору средневысотных орбит для систем ГЛОНАСС и GPS с 24 спутниками. Близкие характеристики имеет также система Галилео. Однако, следует заметить, что у каждой из навигационных систем имеются свои оригинальные решения.
2.6.4 Системы координат
Поскольку система координат определяется координатами станций наблюдений спутников, расположенных либо по всему земному шару (в системе GPS), либо на обширной территории (в системе ГЛОНАСС), то:
- необходимо обеспечить общеземную (глобальную) геодезическую систему координат,
- национальные системы координат не подходят для спутникового позиционирования, за исключением случаев, когда результаты спутниковых измерений необходимо сравнивать с результатами обычных наземных измерений,
- многие государства не обладают спутниковыми системами координат. Если операторы системы собираются изменить каким-либо образом спутниковую систему координат, то пользователи должны приспосабливаться к этим изменениям.
- вычисление спутниковых эфемерид является важной частью в поддержании глобальной спутниковой системы координат, и является обычной обязанностью системных операторов. Качество эфемерид влияет на точность и надежность результатов позиционирования, получаемых пользователем.
Военные геодезисты США и России (СССР) для функционирования своих навигационных систем независимо создали общеземные системы координат. Координаты американских спутников задаются в системе WGS-84, российских спутников – в системе ПЗ-90. Когда стали разрабатываться приемники, работающие по американским и советским спутникам, потребовались параметры связи этих двух систем координат. Задача эта была успешно решена и в США, и в России (подробнее о системах координат см. в главе 3).
2.6.5 Метод измерений расстояний до спутников и принципы позиционирования в СРНС
Спутниковые системы оказывают следующее влияние на проектирование пользовательского оборудования:
- спутники не видны глазом, следовательно, пользователь не имеет прямого «контакта» с системой, и его действия похожи на работу с разновидностью «черного ящика»,
- чтобы повысить применение спутниковой системы, пользовательское оборудование должно быть сравнительно дешевым. Это имеет следующие последствия:
- самое сложное и дорогое оборудование должно размещаться по возможности на спутниках (например, высокостабильные генераторы частоты),
- в приемниках должны использоваться всенаправленные антенны,
- приемники должны быть малыми, с низким энергопотреблением, в основном «пассивно» принимая сигналы и не требуя передачи сигналов на спутники,
- на пользовательском оборудовании должно выполняться много вычислений, что усиливает природу «черного ящика» системы,

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
