
![]() . (9.101)
. (9.101)
Рассмотрение вектора предсказанного состояния x(t) и наблюдений l(t) стохастическими величинами приводит к проблеме последовательного уравнивания
![]() (9.102)
(9.102)
Эта система эквивалентна системе (9.93). Поэтому, решение можно получить немедленно из (9.84) и (9.91), подобрав обозначения к настоящей ситуации, из этого следует:
![]() (9.102)
(9.102)
Матрица усиления К теперь дается как
![]() , (9.104)
, (9.104)
ср. также с уравнением (9.92).
Пример
Рассмотрим транспортное средство, движущееся по прямой линии с постоянной скоростью v, причем движение подвержено влиянию случайного ускорения а. Также предположим, что известно (одномерное) положение p(t0) и скорость v(t0), а также соответствующие дисперсии![]() , и что шум
, и что шум ![]() известен в начальную эпоху t0. Более того, предполагается, что положение судна наблюдается в эпоху t=t0+Dt, и что наблюдение в эту эпоху имеет дисперсию
известен в начальную эпоху t0. Более того, предполагается, что положение судна наблюдается в эпоху t=t0+Dt, и что наблюдение в эту эпоху имеет дисперсию ![]() .
.
Вектор состояния состоит из положения и скорости судна. Таким образом, в начальную эпоху получены
 и
и  . (9.105)
. (9.105)
Подстановка этих векторов и случайного ускорения а в (9.94) дает матрицу динамики и вектор шума движения для эпохи t0:
![]() (9.106)
(9.106)
Матрица перехода в соответствии с уравнением (9.99) имеет вид
![]() , (9.107)
, (9.107)
в ней бесконечный ряд ограничен линейным членом. Считая ускорение постоянным на интервале интегрирования Dt, вектор шума получается из (9.95) как
 . (9.108)
. (9.108)
Заметим, что при настоящих предположениях элементы предсказанного состояния вектора x(t) следуют из уравнения (9.100) как
 . (9.109)
. (9.109)
Поскольку уравнение наблюдений есть ![]() , то матрица А в (9.102) сокращается до вектора-строки
, то матрица А в (9.102) сокращается до вектора-строки
![]() , (9.110)
, (9.110)
а матрица усиления редуцируется до вектора-столбца
 . (9.111)
. (9.111)
Теперь обновленный вектор состояния ![]() и соответствующая кофакторная матрица
и соответствующая кофакторная матрица ![]() может быть вычислена по уравнению (9.103).
может быть вычислена по уравнению (9.103).
9.3.3 Сглаживание
Сглаживанием называется процесс улучшения предыдущих оценок для вектора состояния посредством новых измерений. Поскольку сглаживание выполняется по времени назад (в противоположность Калмановской фильтрации в реальном времени), то этот процесс предназначается для пост-обработки. Ради полноты здесь представлена одна методика сглаживания. Используем обозначение x(t) для предсказанного вектора состояния, ![]() - для обновленного вектора состояния и
- для обновленного вектора состояния и ![]() - для сглаженного вектора состояния, тогда формулу для оптимального сглаживания можно записать как
- для сглаженного вектора состояния, тогда формулу для оптимального сглаживания можно записать как
![]() , (9.112)
, (9.112)
где матрица усиления равна
![]() . (9.113)
. (9.113)
В эпоху последнего обновления измерения обновленный вектор состояния представляет набор (массив), идентичный сглаженному, и можно стартовать алгоритм в обратном направлении. Из уравнения (9.112) можно сделать заключение, что процесс требует предсказанный и обновленный векторы и кофакторную матрицу на эпоху обновления, а также матрицу перехода между эпохами. Это подразумевает, в общем, большой объем данных. Вероятно именно по этой причине оптимальное сглаживание очень часто заменяется эмпирическими методами.
11.1.1.1 WAAS – глобальная система дифференциальных поправок. Система EGNOS в России. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Введение Система WAAS (Wide Area Augmentation System) служит для повышении точности позиционирования навигационных GPS систем. Принцип действия системы несколько отличается от обычного DGPS режима в котором используются корректирующие поправки с наземных базовых станций, передаваемые по каналам GPRS, УКВ и т. п.
Планируется, что через несколько лет общее количество геостационарных спутников всех SBAS систем может достигнуть 19-и.
Как видно из таблицы, возвышение спутников в Москве 25-30 градусов. Фактически, спутники находятся не намного выше уровня горизонта. Поэтому в лесу и городах с плотной застройкой, сигнал со спутников EGNOS будет недоступен для приема навигационной аппаратуре. Чем восточнее находится пользователей, тем меньше становится угол, и соответственно, тем сложнее «увидеть» сигнал Точность позиционирования В качестве экспериментального оборудования использовались две двухчастотные OEM платы геодезического класса, производства «Trimble». Антенна была установлена на 17-и этажном здании, вдали от небоскребов и других высотных зданий, которые бы могли ограничить видимость геостационарных спутников. Приемники были подключенные к одной стационарной GPS антенне. Для проведения сравнительного анализа, на одном из них был отключен режим WAAS. Запись данных осуществлялась в течение 1,5 часов.
Из графиков распределение позиции и результирующей таблицы видно, что включение WAAS режима (график справа) увеличивает горизонтальную ошибку фактически в два раза. При этом вертикальная ошибка фактически остается не изменой. |
архив
Сетевые методы в спутниковой геодезии
1. Активные сети
Активной сетью называют сеть непрерывно действующих станций ГНСС наблюдений, данные которых общедоступны по линиям связи. Такие сети работают на территории США и Канады, в некоторых странах Западной Европы. Отдельные станции начинают действовать в России. Активные сети состоят из контрольных активных станций.
По охвату территорий можно различать:
Глобальные сети
Региональные (континентальные сети)
Локальные сети
Международная ГНСС служба и ее глобальная сеть
Всесторонняя информация, включающая точные эфемериды, параметры часов спутников и другие данные, обеспечивается Информационной системой Центрального бюро (ИСЦБ) Международной GPS службы для геодинамики (МГС), находящейся при Лаборатории реактивного движения (JPL). Система ИСЦБ доступна через Интернет и предлагает данные через протокол FTP.
Международная GPS служба (МГС, первоначальное название Международная служба GPS для геодинамики) является международной научной службой, которая официально начала действовать с 1 января 1994 г. после нескольких лет исследований и опытно-поисковых работ. МГС собирает, архивирует и распределяет данные наблюдений ГЛОНАСС/GPS-приемниками и использует их для расчета высокоточных эфемерид спутников СРНС, параметров вращения Земли (совместно с МСВЗ), координат и скоростей станций слежения МГС в системах ITRF. МГС также сообщает данные о часах станций слежения и спутников СРНС, а также информацию об ионосфере и тропософере. МГС состоит из сети станций наблюдений, Центров данных, Центров анализа, Координатора анализа, Центрального бюро и Руководящего совета (рис. 5.28) [Одуан и Гино 2002].
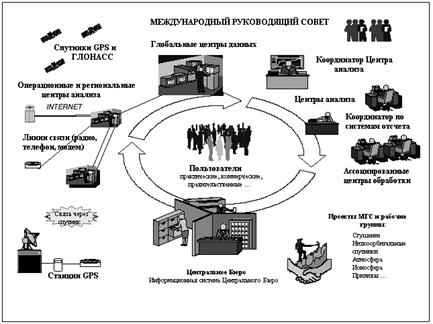
Рис. 5.28. Организация Международной GPS службы [http://igscb.jpl.nasa.gov].
Точность продуктов МГС достаточна для поддержки текущих научных целей, включая реализацию систем координат ITRF, мониторинг вращения Земли и деформации ее твердой и жидкой компонент (табл. 5.8), причем эта точность постоянно повышается.
Таблица 5.8. Характеристики точности продуктов МГС
Вид информации | Быстрые (прогноз) | Быстрые (обработан-ные) | Срочные данные | Окончатель-ные данные |
Задержка в получении данных | Реальное время | 3 часа | 17 часов | 13 суток |
Эфемериды спутников GPS (см) | 10 | 5 | <5 | <5 |
Поправки часов спутников GPS (нс) | 5 | 0.2 | 0.1 | <0.1 |
Координаты полюса (0.001²) | 0.3 | 0.1 | <0.1 | 0.05 |
Продолжительность суток (мкс/сут.) | 0.06 | 0.03 | 0.03 | <0.02 |
Координаты станций (в плане/по высоте, мм) | - | - | - | 3/6 |
Скорости движения станций (в плане/по высоте, мм/год) | - | - | - | 2/3 |
Тропосферная зенитная задержка (мм) | - | 6 | - | 4 |
Для сравнения отметим, что точность бортовых эфемерид спутников GPS составляет 2 м, а точность поправки часов – 7 нс. Погрешности точных орбит спутников ГЛОНАСС равны 0.3 м.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 |
