

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Необходимо признать, что проблема развития электроэнергетики во многом не решена и за рубежом, хотя в странах с либеральной экономикой она возникла намного раньше. Ориентация на методы стратегического менеджмента, который предназначен решать задачи устойчивого развития компаний и обеспечивать высокий уровень организации, во многом не дает желаемого результата. Если рассматривать электроэнергетику в соответствие с «Законом об электроэнергетике» как систему экономических отношений составляющих ее субъектов, то ЭС ГИ сегодня стала системой их производственных отношений. Существующие недостатки в части построения системы производственных отношений проявляется снижением эффективности и надежности ЭС ГИ. Можно наблюдать противоречия интересов субъектов электроэнергетики, которые нарастают и обнажаются, что сопровождается отказами от решений, заложенных в «Генеральной схеме размещения объектов энергетики» и «Программе перспективного развития электроэнергетики» как основы проектирования развития ЭС ГИ, более того, отсутствует устойчивое развитие электроэнергетики.
Как указано в цитируемой работе , произошедшие преобразования электроэнергетики привели к ее превращению из производственной в социотехническую систему, принципиально отличающуюся тем, что развитие может осуществляться только на основе самоорганизации за счет внутренних сил, формирующихся под влиянием внешних условий. Таким образом, имеет место смена парадигмы развития электроэнергетики. В рамках новой парадигмы предлагается концептуальная модель развития, построенная на основе теории самоорганизации, в соответствии с которой устойчивое развитие электроэнергетики обеспечивается непрерывным поддержанием в ней триединых процессов: стабилизации, упорядочивания и детерминированного хаоса, создающего многообразие и свободу выбора путей развития [7].
В сущности, современная электроэнергетика является потенциально самоорганизующейся, развивающейся системой, а после произошедшего ее реформирования – самоорганизующейся системой без организующего центра.
Развитие осуществляется за счет освоения потенциала развития. Чем больше он освоен, тем менее интенсивно идет развитие. При его исчерпании возникает кризис. Сам же потенциал развития может наращиваться исключительно за счет внешней среды, в данном случае для электроэнергетики - за счет освоения научно-технических достижений в области организации и управления электроэнергетикой (организованность), в области производства и передачи электроэнергии (инновационность), ростом энерговооруженности экономики и жизнедеятельности [54].
Электроэнергетика как отрасль народного хозяйства характеризуется большой инерционностью развития. Строительство основных электроэнергетических объектов продолжается в среднем 10-15 лет, и поэтому крупные структурные сдвиги в электроэнергетике — создание новых электрических станции (ЭС), мощных линий электропередач (ЛЭП), потребителей электрической энергии (ПЭЭ) - необходимо планировать за 12-17 лет. Динамика производства и потребления электрической энергии определяется объективными тенденциями развития как энергопроизводящего комплекса, так и отраслей народного хозяйства. Под объективными тенденциями развития понимается, например, создание тепловых ЭС вблизи залежей угля, атомных ЭС в местности, не имеющей энергетического сырья, пропорциональность развития электроэнергетики и отраслей народного хозяйства, создание ПЭЭ в густонаселенных центрах и т. д.
На объективные тенденции развития оказывает влияние множество неопределенных и случайных факторов. Неопределенные факторы отражают неполноту информации в данное время о развитии в будущем потребностей в электрической энергии по отраслям народного хозяйства. Случайные - характеризуют, например, случайные колебания количества и качества электрической энергии.
При долгосрочном планировании производства, распределения и потребления электрической энергии приходится учитывать воздействие неопределенных факторов, а случайные факторы не столь существенны. Образно говоря, долгосрочное планирование играет роль «советника», рекомендующего проводить определенную техническую политику в формировании электроэнергетического баланса будущего.
Электроэнергетика представляет собой некоторую сложную энергетическую систему, в том числе с фиксированным пространственным распределением ЭС ГИ, ПЭЭ и соединяющими их ЛЭП. Для того чтобы описать состояние такой системы по планируемому производству, распределению и потреблению электрической энергии, необходимо указать для каждой группы ЭС ГИ свою группу ПЭЭ. Иными словами, следует указать величину прогнозируемой мощности Wij, передаваемой из i-й зоны ее производства в j-ю зону потребления, ![]() ;
; ![]() . Распределением мощности будем называть матрицу S=[Wij],
. Распределением мощности будем называть матрицу S=[Wij], ![]() ;
;  , которая характеризует состояние ЭС ГИ.
, которая характеризует состояние ЭС ГИ.
Энтропийный подход позволяет предсказать определенное состояние ЭС ГИ с нужной точностью, не изучая поведение каждого отдельного ПЭЭ. В основе энтропийного подхода в определении состояния ЭС ГИ лежит принцип максимизации энтропии.
Таким образом, содержательная постановка задачи включает создание энтропийной модели долгосрочного планирования производства, распределения и потребления мощности в ЭС ГИ, которая бы корректно в зависимости от горизонта рассматриваемой перспективы описывала динамику потребления электрической энергии для всей системы в целом с учетом влияния неопределенных факторов и таких тенденций развития электроэнергетики, как инерционность, пропорциональность и т. д.
Как показано в [55], для отыскания планируемого наиболее вероятного распределения потоков мощности в системе введем в рассмотрение, помимо Wij, следующие переменные: Аi - величина мощности, планируемая к производству во всей i-й зоне; Bj - величина мощности, планируемая к потреблению во всей j-й зоне; rij-планируемые затраты на передачу единичной мощности в зависимости от расстояния из i-й зоны в j-ю зону; R – планируемые полные затраты на передачу мощности во всей ЭС ГИ. Тогда ограничения на Wij, имеют вид
![]() ,
,![]() ; (3.27)
; (3.27)
![]() ,
,![]() ; (3.28)
; (3.28)
![]() . (3.29)
. (3.29)
Пока не получено наиболее вероятного распределения потоков мощности в ЭС ГИ, будем полагать, что технологические расходы на передачу электрической энергии, зависящие от величины передаваемой мощности, учитываются по каждой зоне потребления и входят составной частью в величины Bj,  . Поэтому, естественно, что
. Поэтому, естественно, что
![]() , (3.30)
, (3.30)
где W – величина суммарной мощности, потребляемой во всей ЭС ГИ.
Теперь необходимо найти матрицу S=[Wij] при ограничениях (3.27) – (3.29).
Определим
Pij =Wij/W, (3.31)
где Pij-доля от W, распределенная между i-й зоной производства и j-й зоной потребления. Тогда энтропия ЭС ГИ представляет собой функционал
Н (р11, р12,… рij,…рkm)= –![]() . (3.32)
. (3.32)
Доказательство положения, что выражение (3.32) есть единственная однозначная мера энтропии, приведено в [10]:
Для получения набора, Pij,, ![]() ; , максимизирующего Н (р11, р12,… рij,…рkm) при ограничениях (3., необходимо максимизировать лагранжиан L [13].
; , максимизирующего Н (р11, р12,… рij,…рkm) при ограничениях (3., необходимо максимизировать лагранжиан L [13].
L=Н (р11, р12,… рij,…рkm)+
+ , (3.33)
, (3.33)
где ![]() - множители Лагранжа
- множители Лагранжа
ai=Ai/W; bj=Bj/W; c=R/W.
Значения Pij, которые максимизируют лагранжиан L и, следовательно, являются наиболее вероятным распределением мощности в ЭС ГИ, представляют собой решение системы уравнений
![]() ,
, ![]() ; . (3.34)
; . (3.34)
С учетом (3.34) получим
-lnPij-1-![]() -
-![]() -
-![]() rij=0.
rij=0.
Откуда
Pij=exp(-(1+![]() +
+![]() +
+![]() rij) (3.35)
rij) (3.35)
Теперь определим множители ![]() . Для этого подставим (3.35) в (3.32) и (3.33). Получим, что
. Для этого подставим (3.35) в (3.32) и (3.33). Получим, что
![]() ;
; ![]() ;
; ![]() ; , (3.36)
; , (3.36)
где Qi =  ; Dj=
; Dj=  .
.
В более простой форме записи выражения Qi и Dj имеют вид
Qi= ; (3.37)
; (3.37)
Dj= ; (3.38)
; (3.38)
Тогда
Pij= ; (3.39)
; (3.39)
Коэффициенты Qi, и Dj определяются из выражений (3.37), (3.38) путем совместного их решения методом итераций.
Множитель ![]() находится из очевидного соотношения
находится из очевидного соотношения
![]() . (3.40)
. (3.40)
Множитель ![]() можно было бы определить, подставляя Pij в (3.29). Однако величина R обычно неизвестна и поэтому (3.29) не решается относительно
можно было бы определить, подставляя Pij в (3.29). Однако величина R обычно неизвестна и поэтому (3.29) не решается относительно ![]() . А теперь, определив Pij и, зная значения rij, появляется возможность найти величину R, при этом найденные Pij минимизируют планируемые полные затраты R.
. А теперь, определив Pij и, зная значения rij, появляется возможность найти величину R, при этом найденные Pij минимизируют планируемые полные затраты R.
Когда получено распределение потоков мощности по ЭС ГИ, появляется возможность в явном виде определить технологические расходы на передачу электроэнергии (потери мощности) из каждой i-й зоны производства в каждую j-ю зону потребления.
Найденные значения Wij, Аi, Bj по каждой зоне производства и потребления электроэнергии, отмечая основные тенденции развития электроэнергетики и способствуя решению актуальной научной проблемы улучшения электроэнергетического баланса, в то же время указывают на возможные структурные изменения электрических сетей и генерирующих мощностей. Такие структурные изменения необходимо проводить на основе энтропийных оптимизационных моделей с целевой функцией в виде минимальных экономических затрат.
3.5 Выводы
1. Получены условия возникновения самоорганизации и синхронизации на основании эквивалентности приращений текущей энтропии и спектральной плотности энергетического спектра случайных и хаотических режимов, приводящие к энтропийной устойчивости ЭС ГИ.
2. Показано, что энтропийно устойчивыми являются квазиоптимальные ЭС ГИ. В этой связи сформулировано «золотое правило» электроэнергетики: чтобы ЭС ГИ была энтропийно устойчивой, она должна быть в достаточной степени неупорядоченной, поскольку чувствительность можно уменьшить лишь ценой ухудшения показателей качества функционирования ЭС ГИ.
3. Получен через отыскание текущей энтропии критерий инвариантности квазиоптимальных решений для различных типов «угрожающих аварией» режимов ЭС ГИ.
4. Представлены энтропийные модели, анализ которых приводит к пониманию сущности каскадного развития аварийных режимов, живучести ЭС ГИ и взаимосвязи электроэнергетики и экономики.
ГЛАВА 4. ЭНТРОПИЙНЫЕ МОДЕЛИ РЕЖИМОВ ДЕТЕРМИНИРОВАННОГО ХАОСА В ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМАХ С ГЕНЕРИРУЮЩИМИ ИСТОЧНИКАМИ
Для формирования и анализа энтропийных моделей возникновения и развития хаотических режимов частоты и отклонений частоты от номинального значения, напряжений и отклонений напряжения от номинального значения используются имитационные математические модели [8,71] одномашинной, двухмашинной, трехмашинной ЭС ГИ с изменяющейся во времени нагрузкой при условии незначительной диссипации энергии. Основные результаты численного моделирования будут относиться к энтропийной модели ЭС ГИ сравнительно небольшой мощности, так как именно в таких ЭС ГИ наиболее вероятно возникновение хаотических режимов отклонений частоты и отклонений напряжения.
4.1 Определение характеристических показателей Ляпунова
Переходные колебания определены как переходный хаос тогда и только тогда, когда характеристика переходного колебания такая же как характеристика хаоса на интервале наблюдения. Вышеупомянутое определение может быть уточнено введением показателей Ляпунова.
Математическое определение показателей Ляпунова может быть дано с помощью уравнения нелинейной динамической системы ![]() . Сначала мы дифференцируем уравнение
. Сначала мы дифференцируем уравнение  относительно исходного положения x0. В результате получим [1]
относительно исходного положения x0. В результате получим [1]
 (4.1)
(4.1)
где ![]() – решение при x=x0.
– решение при x=x0.
Определяя ![]() , переписываем (4.1) как
, переписываем (4.1) как
 (4.2)
(4.2)
Пусть mi(t), i = 1, 2, ..., n будут собственными значениями Фt(х0). Точное определение показателей Ляпунова λi дается следующим выражением [70]
![]() (4.3)
(4.3)
Из этого определения ясно, что показатели Ляпунова представляют собой средний коэффициент (скорость) расширения или сжатия i–го измерения в Rn фазовом пространстве аттрактора.
Используя понятие показателей Ляпунова, мы можем определить переходный хаос более тщательным образом. На данном интервале ![]() показатели Ляпунова
показатели Ляпунова ![]() , i=1,…,n определены как
, i=1,…,n определены как
 , (4.4)
, (4.4)
где величины ![]() такие же, как в уравнении (4.3).
такие же, как в уравнении (4.3).
Переходные колебания образуют переходный хаос на всем интервале, тогда и только тогда, когда имеется, по крайней мере, одна положительная величина ![]() .
.
Переходное хаотическое колебание обладает свойствами широкополосного энергетического спектра и непредсказуемости на интервале ![]() , так как эти свойства – прямые следствия наличия положительных значений показателей Ляпунова, которые объясняют чрезвычайную чувствительность к начальным условиям. Если показатель Ляпунова
, так как эти свойства – прямые следствия наличия положительных значений показателей Ляпунова, которые объясняют чрезвычайную чувствительность к начальным условиям. Если показатель Ляпунова  – положительная величина, то тогда колебание идентифицировано как переходное хаотическое колебание и величина
– положительная величина, то тогда колебание идентифицировано как переходное хаотическое колебание и величина ![]() подразумевает большую чувствительность к начальным условиям. Основываясь на вышеупомянутом, разработан двухшаговый алгоритм вычисления для обнаружения переходных хаотических колебаний.
подразумевает большую чувствительность к начальным условиям. Основываясь на вышеупомянутом, разработан двухшаговый алгоритм вычисления для обнаружения переходных хаотических колебаний.
Алгоритм вычисления
Предполагается, что имеется устройство измерения фазы на каждом генераторе. Эти измерения фазы в реальном времени сообщаются в центр управления, чтобы выполнить задачу обнаружения хаотических колебаний. Тогда двухшаговый алгоритм вычисления ![]() можно представить следующим образом.
можно представить следующим образом.
Имеется последовательность измерений углового вектора  и последовательность измерений частотного вектора
и последовательность измерений частотного вектора ![]() , k=0, 1, …, N,
, k=0, 1, …, N, ![]() является периодом квантования,
является периодом квантования, ![]() является интервалом измерения, а m – число генераторов.
является интервалом измерения, а m – число генераторов.
Шаг 1: Использование  и
и ![]() для идентификации классических уравнений колебания.
для идентификации классических уравнений колебания.
Шаг 2: Вычисление ![]() из идентифицированных классических уравнений колебания. Использование знака
из идентифицированных классических уравнений колебания. Использование знака ![]() как показателя обнаружения переходных хаотических колебаний.
как показателя обнаружения переходных хаотических колебаний.
Пояснение шага l: Принимая во внимание, что ЭС ГИ включает в себя m генераторов, классические уравнения колебаний имеют вид [9]
 (4.5)
(4.5)
где ![]() – i-я составляющая
– i-я составляющая ![]() и Pi, Di, Bij, Gij, Тji, Ei – соответственно генерируемая активная мощность, энергия демпферной обмотки, реактивная проводимость, активная проводимость, момент инерции и напряжение (ЭДС) i-го генератора.
и Pi, Di, Bij, Gij, Тji, Ei – соответственно генерируемая активная мощность, энергия демпферной обмотки, реактивная проводимость, активная проводимость, момент инерции и напряжение (ЭДС) i-го генератора.
Устанавливаем параметры ЭС ГИ:
 ,
,  ,
,  и
и  . (4.6)
. (4.6)
Тогда  может быть аппроксимировано последовательно измеренными частотами, а именно
может быть аппроксимировано последовательно измеренными частотами, а именно
 (4.7)
(4.7)
Пояснение шага 2: Пусть уравнения  идентифицируют колебания в уравнении (4.7). Соответствующее уравнение может быть найдено из (4.2). Выбираем начальное возмущение
идентифицируют колебания в уравнении (4.7). Соответствующее уравнение может быть найдено из (4.2). Выбираем начальное возмущение ![]() приближенно равным начальному значению углового вектора
приближенно равным начальному значению углового вектора ![]() . Интегрируя уравнение (4.7) за ΔТ секунд, получаем
. Интегрируя уравнение (4.7) за ΔТ секунд, получаем
![]() (4.8)
(4.8)
Повторяем эту процедуру интегрирования по всему интервалу N раз. Тогда самый большой показатель Ляпунова, заключенный на интервале  , вычисляется следующим образом:
, вычисляется следующим образом:
 (4.9)
(4.9)
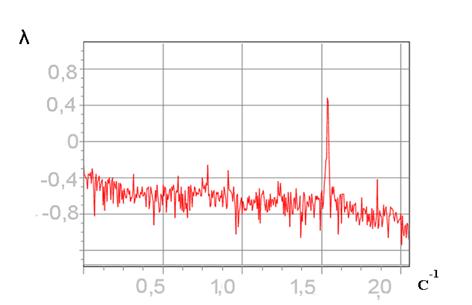
Рисунок 4.1 Характеристические показатели Ляпунова для математической модели (4.5), (4.9).
Алгоритм и программа зарегистрированы в объединенном фонде электронных ресурсов «Наука и образование» РАО [42].
4.2 Имитационная схема замещения с положительными обратными связями для моделирования хаотических режимов
Дифференциальные уравнения созданной и апробированной имитационной электронной модели, схема замещения которой показана на рисунке 4.2, структурно подобны дифференциальным уравнениям ЭС ГИ с системами управления АРС, АРВ отдельных генераторов и системами противоаварийной автоматики АЧР, САОН. Имитационная модель позволяет проводить анализ энтропийной устойчивости и, следовательно, синхронизации в условиях хаотических режимов для ЭС ГИ. Под синхронизацией понимают самопроизвольное установление в ЭС ГИ автоколебаний единой синхронной частоты, устойчивых к возмущениям относительно колебаний в отдельных подсистемах ЭС ГИ.
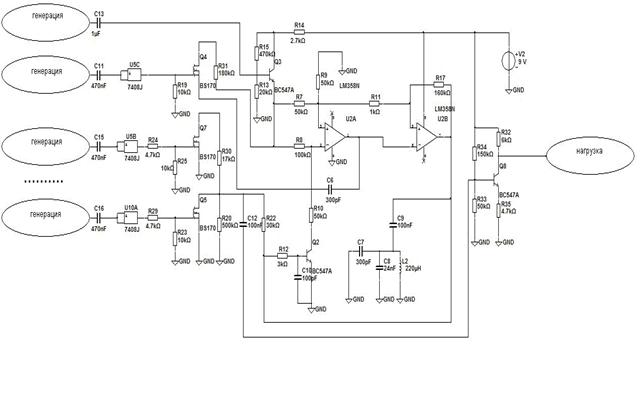
Рис. 4.2 Имитационная электронная модель ЭС ГИ
Имитационная модель предполагает моделирование ЭС ГИ, состоящей из синхронных генераторов без учета демпферных обмоток, и параметры схемы замещения которой определяются по известным паспортным и конcтруктивным данным, а приближенный расчет индуктивных сопротивлений по продольным и поперечным осям проводится с использованием Uкз,%. Имитационная модель одного из генераторов, входящего в состав ЭС ГИ, показанная на рисунке 4.3, включает в себя систему управления с контурами регулирования частоты (АРС) и амплитуды выходного напряжения (АРВ) синхронного генератора. Моделирование режимов нагрузки возможно в пределах от 10% до 110% мощности, при этом обеспечено выполнение требований к показателям качества генерируемого напряжения при превышении нагрузочной мощности на 10% выше номинальной. Погрешность расчета параметров схемы замещения имитационной модели по продольной (Хd) и поперечной (Хq) осям не должна превышать 1,6% и 1,2% соответственно [1].
Результатом выполненных исследований являются разработанные алгоритмы, проверка которых осуществлялась на тестовых задачах, которые позволяют определять бифуркационные параметры ЭС ГИ и их численные значения, анализировать связанные с бифуркациями различные типы решений, включая хаотические решения, минимизировать потери активной мощности по критерию энтропийной устойчивости во всех режимах работы, включая режимы детерминированного хаоса, что в реальных условиях ведет к экономической эффективности и энергосбережению на всех этапах эксплуатации ЭС ГИ.
В этом отношении необходимо указать, что ЭС ГИ со слабой положительной обратной связью (СПОС), а наличие хотя бы одной спонтанно возникающей СПОС является необходимым условием возникновения режимов детерминированного хаоса, всегда превращает всю свою свободную энергию в работу против ожидаемого равновесия. В режимах детерминированного хаоса, когда в ЭС ГИ имеет место СПОС, ЭС ГИ обязана работать против ожидаемого равновесия. В хаосе равновесия не может быть, и, хотя через бифуркации меняется тип решения, но к равновесию ЭС ГИ не приходит.
Как упоминалось ранее, в точках бифуркации происходит смена типов решений, т. е. происходит смена пространственно-временной организации ЭС ГИ, но вдали от равновесия каждая подсистема «видит» всю ЭС ГИ в целом, а в равновесии ЭС ГИ «слепа». Отсюда следует, что вдали от положения равновесия когерентность поведения подсистем ЭС ГИ в огромной степени возрастает.
Таким образом, имитационная параметрическая модель позволила объединить данные измерений и численно-аналитические эксперименты на ЭВМ.
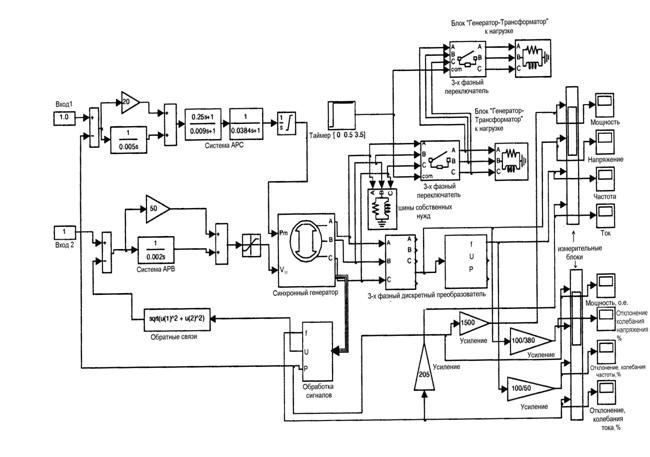
Рисунок 4.3. Имитационная модель синхронного генератора [24]
4.3. Энтропийная модель режимов детерминированного хаоса в электротехнической системе с одним генератором
Рассмотрим энтропийную устойчивость (неустойчивость) возникающих режимов детерминированного хаоса в ЭС ГИ с одним генератором, изображенной на рисунке 1.2. В нее входит генератор, снабжающий энергией динамически изменяющуюся во времени нагрузку или стационарную во времени нагрузку и линия электропередачи.
Изменение текущей энтропии режимов детерминированного хаоса будем определять через спектральную энергетическую плотность, характеризующую мощность (энергию) хаотических режимов. Характер изменения спектральной энергетической плотности позволит сделать вывод об энтропийной устойчивости (неустойчивости) режимов детерминированного хаоса и, следовательно, предсказать последующую эволюцию хаотических режимов.
Нелинейные дифференциальные уравнения состояния и параметры схемы замещения ЭС ГИ, необходимые для анализа хаотических режимов частоты и отклонений частоты ![]() , напряжений и отклонений напряжения
, напряжений и отклонений напряжения ![]() имеют вид [45]
имеют вид [45]
 (4.10)
(4.10)
где ![]() - колебания фазового угла на шинах генератора,
- колебания фазового угла на шинах генератора,
![]() - колебания фазового угла в линии электропередачи,
- колебания фазового угла в линии электропередачи,
![]() - отклонение угловой частоты от номинального значения,
- отклонение угловой частоты от номинального значения,
![]() - напряжение в конце линии электропередачи (на шинах нагрузки),
- напряжение в конце линии электропередачи (на шинах нагрузки),
![]() - переменное значение реактивной мощности.
- переменное значение реактивной мощности.
Здесь ![]() - вектор переменных состояния,
- вектор переменных состояния,
![]() -совокупность параметров ЭС ГИ,
-совокупность параметров ЭС ГИ,
(δ(0)=0.3, ω(0)=0÷1.55, δЛ(0)=0.2, UЛ(0)=0.97) – совокупность начальных условий.
Численное интегрирование (4.10) проводилось при следующих значениях параметров ЭС ГИ в относительных единицах:

Начальное значение отклонений угловой частоты ![]() медленно меняется в диапазоне 0
медленно меняется в диапазоне 0![]() 1,55 рад/c.
1,55 рад/c.
Бифуркационное значение Q1в принимаем равным 10,89 (произошел наброс нагрузки). Это значение определяется неоднократным численным интегрированием систем дифференциальных уравнений (4.10) до тех пор, пока не появляется хаотический режим.
В таблице 4.1 представлены результаты моделирования режимов одномашинной ЭС ГИ при различных начальных условиях.
Таблица 4.1 – Различные состояния системы при различных угловых частотах
| Время моделирования (с) | Конечное состояние | Фазовый портрет (диаграмма) |
1.40 | 0,6 | Точка равновесия | Рис. 4.4 |
1.36 | 1,5 | Точка равновесия | Рис. 4.5 |
1.60 | 1,5 | Энтропийно неустойчивый хаос | Рис. 4.6 |
1.40 | 1,6 | Энтропийно устойчивый хаос | Рис. 4.7 |
Также на основании системы дифференциальных уравнений (4.10), заданных значений параметров и начальных условий получена оценка наибольшего показателя Ляпунова ![]() . Ввиду положительного знака величина
. Ввиду положительного знака величина ![]() , мы приходим к заключению, что напряжения и отклонения напряжения являются хаотическими колебаниями.
, мы приходим к заключению, что напряжения и отклонения напряжения являются хаотическими колебаниями.
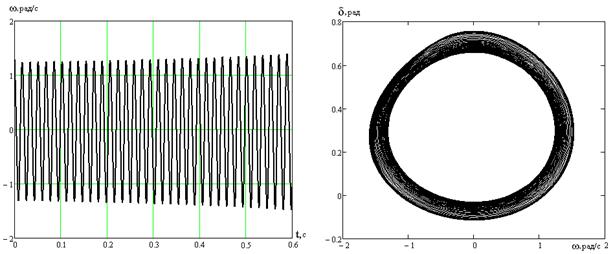
Рисунок 4.4 – Результаты моделирования при начальном
отклонении угловой частоты ![]() рад/с
рад/с
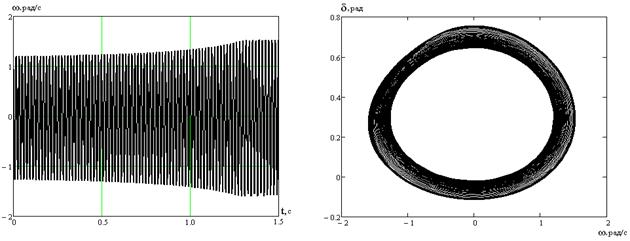
Рисунок 4.5 – Результаты моделирования при начальном отклонении
угловой частоты  рад/с
рад/с
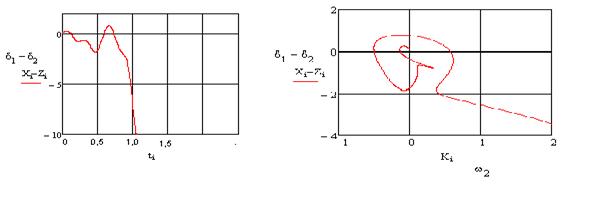
Рисунок 4.6 – Потеря энтропийной устойчивости хаотических колебаний угла поворота ротора при начальном отклонении угловой частоты ![]() рад/с
рад/с
Численное интегрирование (4.10) обнаруживает, что напряжение ![]() (t) линии электропередачи колеблется вполне хаотично, как показано на рисунке 4.7
(t) линии электропередачи колеблется вполне хаотично, как показано на рисунке 4.7
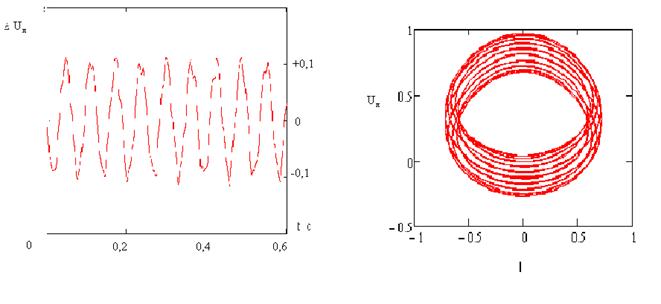
Рисунок 4.7 – Энтропийно устойчивые хаотические колебания напряжения ![]() (t) линии электропередачи при начальном напряжении
(t) линии электропередачи при начальном напряжении ![]() (0)=0,97
(0)=0,97
Следует подчеркнуть, что указанные режимы детерминированного хаоса могут возникать и при решении жестких систем нелинейных дифференциальных уравнений, когда модель ЭС ГИ включает в себя совместное описание электромеханических и электромагнитных процессов.
4.4 Энтропийная модель режимов детерминированного хаоса в электротехнической системе с двумя генераторами
Рассмотрим энтропийную устойчивость (неустойчивость) возникающих режимов детерминированного хаоса в двухмашинной ЭС ГИ, изображенной на рисунке 4.8. В нее входят два генератора, снабжающие энергией динамически изменяющуюся во времени нагрузку или стационарную во времени нагрузку и три линии электропередачи.
Изменение текущей энтропии режимов детерминированного хаоса будем определять через спектральную энергетическую плотность, характеризующую мощность (энергию) хаотических режимов. Характер изменения спектральной энергетической плотности позволит сделать вывод об энтропийной устойчивости (неустойчивости) режимов детерминированного хаоса и, следовательно, предсказать последующую эволюцию хаотических режимов.
Анализ возникновения хаотических режимов отклонений угловой частоты проводился для двухмашинной ЭС ГИ с линиями без потерь. Предполагается, что синхронные генераторы имеют разную инерционность и разное демпфирование. Исследуемая ЭС ГИ показана на рисунке 4.8.
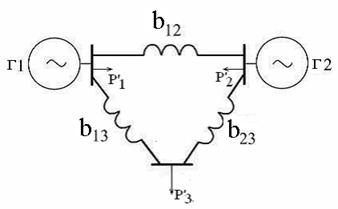
Рисунок – 4.8. Электротехническая система с двумя генераторами [44]

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
