

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
До подъема вертикальных аппаратов спаренными кранами следует для обеспечения безопасного ведения работ заранее определить, исходя из запаса грузоподъемности крана, предельно допустимый угол отклонения оси аппарата от вертикали (j) и разницу отметок мест строповки (h) с учетом возможности неравномерной работы кранов (рис. 8).
В процессе подъема угол отклонения оси аппарата от вертикали определяют с помощью уровней, отвесов и транспортиров, теодолита и других приборов.
Величину дополнительной нагрузки на краны при отклонении оси аппарата от вертикали определяют по графику на рис. 9.
Пример расчета допускаемого угла отклонения оси аппарата от вертикали и разницы отметок мест строповки при неравномерной работе кранов приведен в приложении 2.
4.9. Подъем вертикального аппарата методом скольжения без передвижения спаренных кранов (рис. 10) применяется при отсутствии крана грузоподъемностью, равной массе аппарата, или с рабочим оборудованием, обеспечивающим размещение аппарата в подстреловом пространстве.
Общая грузоподъемность спаренных кранов на необходимых для монтажа вылетах крюков должна быть не менее подъемной массы аппарата.
Из указанных на рис. 3 схем наиболее проста и предпочтительна схема подъема аппарата спаренными кранами (рис. 3, з), при которой краны совершают только одну рабочую операцию - подъем крюка.
4.9.1. Технология подъема аппарата аналогична технологии подъема аппарата одним краном со строповкой за вершину. Места строповки аппарата следует располагать по возможности ближе к центру тяжести аппарата, что способствует лучшему распределению нагрузок на краны.
Максимальные параметры вертикальных аппаратов, которые могут быть подняты данным способом с помощью стреловых кранов соответствующих типоразмеров, приведены в табл. 4.
4.10. Подъем вертикального аппарата методом скольжения с передвижением спаренных кранов (рис. 11) следует применять, когда краны невозможно установить так, чтобы поднять аппарат без их передвижения. При этом необходимо синхронизировать работу кранов при их передвижении с помощью особо четкого руководства и контроля за ходом подъема.
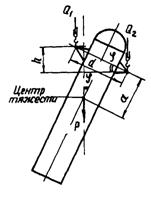
Рис. 8. Расчетная схема подъема аппарата двумя кранами
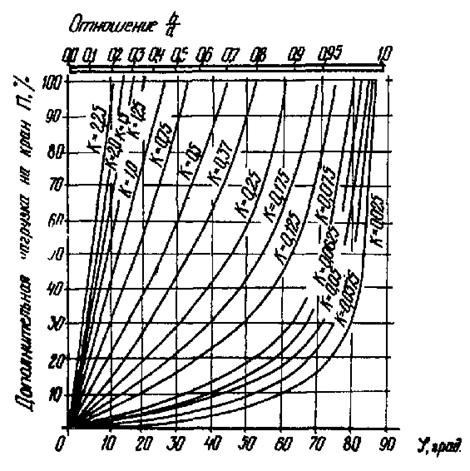
Рис. 9. График зависимости дополнительной нагрузки (%) на один из кранов от угла отклонения оси аппарата от вертикали:
a - расстояние от центра тяжести до места строповки аппарата по его оси, м; d - расстояние между местами строповки аппарата, м; h - разница отметок мест строповки при неравномерной работе кранов, м
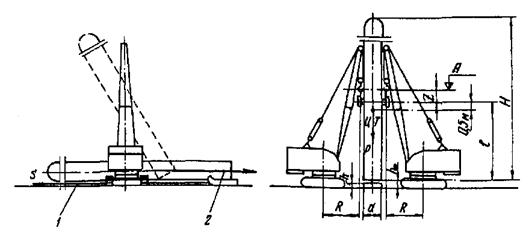
Рис. 10. Схема подъема аппарата спаренными кранами методом скольжения (строповка согласно рис. 2, д):
1 - подтаскивающая система; 2 - тормозная оттяжка
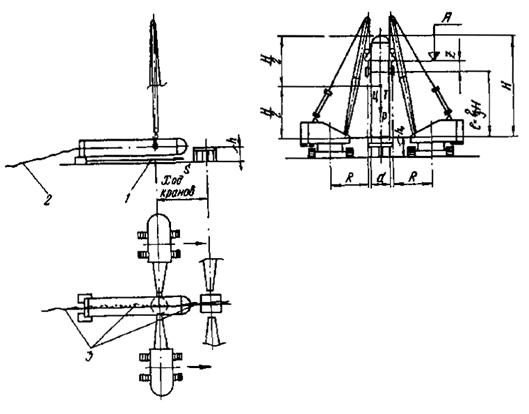
Рис. 11. Схема подъема аппарата спаренными кранами методом скольжения при строповке на высоте 2/3 от основания с передвижением кранов (строповка согласно рис. 2, д):
1 - подтаскивающая система; 2 - тормозная оттяжка; 3 - расчалки для удержания аппарата от раскачивания
Таблица 4
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 10, а также значения усилий в подтаскивающей системе (h = 0,3 м, h0 = 0,65 м, Z = 2,0 м)
Модель крана | Длина стрелы, м | Показатели | |||||||
A, м | R, м | d, м | H, м | l, м | Q, т | P, т | S, тс | ||
МКГ-25 | 12,5 | 12 | 3,8 | Не ограничен | 17,7 | 9,35 | 25 | 45 | 1,07 |
22,5 | 22 | 4 | 37,7 | 19,35 | 16 | 29 | 0,41 | ||
32,5 | 32 | 5,0 | 57,7 | 29,35 | 10 | 18 | 0,18 | ||
СКГ-30 | 15 | 14,5 | 5 | 22,7 | 11,85 | 30 | 54 | 1,14 | |
20 | 19,1 | 5,15 | 31,9 | 16,45 | 20 | 36 | 0,54 | ||
25 | 23,9 | 7,35 | 32,5 | 21,25 | 15 | 27 | 0,32 | ||
СКГ-40 | 15 | 14,8 | 4,5 | 23,3 | 12,15 | 40 | 72 | 1,48 | |
20 | 19,7 | 6,15 | 33,1 | 17,05 | 20 | 36 | 0,53 | ||
25 | 23,9 | 7,35 | 41,5 | 21,25 | 15 | 27 | 0,32 | ||
СКГ-63 | 15 | 15 | 4,5 | 23,7 | 12,35 | 63 | 113 | 2,3 | |
30 | 30 | 6 | 53,7 | 27,35 | 35 | 63 | 0,58 | ||
40 | 39,8 | 7 | 73,3 | 37,15 | 25 | 45 | 0,3 | ||
СКГ-100 | 20 | 19,5 | 6 | 32,7 | 16,85 | 100 | 180 | 2,67 | |
40 | 37,5 | 9,5 | 68,7 | 34,85 | 30 | 54 | 0,4 |
Масса аппарата Р, поднимаемого по схеме рис. 10 спаренными кранами, дана для строповки аппарата за монтажные штуцеры. При использовании балансирных устройств масса поднимаемого аппарата с этими устройствами может быть равна суммарной грузоподъемности кранов.
В табл. 5 приведены максимальные параметры вертикальных аппаратов, которые могут быть подняты с помощью данного способа кранами соответствующих типоразмеров.
Таблица 5
Максимальные параметры вертикальных аппаратов, которые могут быть подняты стреловыми кранами соответствующих типоразмеров по схеме рис. 11, а также значения усилий в подтаскивающей системе (h = 2,0 м, h0 = 2,2 м, Z = 2,0 м)
Модель крана | Длина стрелы, м | Показатели | |||||||
A, м | R, м | d, м | H, м | l, м | Q, т | P, т | S, тс | ||
МКГ-25 | 12,5 | 12 | 4,0 | Не ограничен | 11,7 | 7,8 | 25 20 | 30 24 | 3,75 3 |
22,5 | 22 | 5,2 | 26,7 | 17,8 | 11,2 9 | 13,5 11 | 1,7 1,37 | ||
СКГ-30 | 15 | 14,5 | 5 | 15,45 | 10,3 | 30 24 | 42 33,5 | 5,25 4,18 | |
20 | 19,1 | 6,5 | 22,35 | 14,9 | 20 16 | 28 22,4 | 3,5 2,8 | ||
25 | 23,9 | 7,0 | 29,55 | 19,7 | 15 12 | 21 16,8 | 2,62 2,1 | ||
СКГ-40 | 15 | 14,8 | 4,5 | 15,9 | 10,6 | 40 32 | 56 45 | 7 5,62 | |
20 | 19,7 | 5,6 | 23,25 | 15,5 | 25 20 | 35 28 | 4,37 3,5 | ||
25 | 23,9 | 6,7 | 29,55 | 19,7 | 20 16 | 28 22,4 | 3,5 2,8 | ||
СКГ-63 | 15 | 15 | 5,0 | 16,2 | 10,8 | 63 50 | 38 70 | 11 8,7 | |
25 | 24,2 | 6,5 | 30,0 | 20,0 | 40 32 | 56 45 | 7 5,6 | ||
30 | 30 | 7,0 | 38,7 | 25,8 | 35 28 | 49 39,2 | 6,1 4,9 | ||
СКГ-100 | 20 | 19,5 | 6,0 | 22,95 | 15,3 | 100 80 | 140 112 | 17,5 14,0 | |
30 | 29,5 | 7,0 | 38,00 | 25,3 | 63 50,4 | 88 75,6 | 11 9,45 |
Примечание. В числителе даны значения масс аппаратов, грузоподъемностей кранов и усилий в подтягивающей системе при движении кранов со стрелами, расположенными вдоль гусениц, в знаменателе - со стрелами, расположенными поперек гусениц.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
