

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
При цветовых преобразованиях необходимо также помнить, что между цветовыми моделями CIE, CMY, RGB, YIQ существуют аффинные преобразования, тогда, как между HLS и HSV- нет. Данное обстоятельство будет заметно, если изображение, содержащее непрерывные цветовые переходы, переводить, например, из HLS в RGB (на изображениях может появиться разрыв непрерывности).
Наиболее эффективно вести распознавание получив «чистый» сигнал с матрицы. Но на практике это решение не всегда возможно. Цифровые процессоры сигналов камеры наблюдения, последующих устройств формируют сигналы в одном из указанных стандартов и обратное преобразование не эффективно, так как первичная информация частично потеряна. Не редко отличительными признаками могут являться сами компоненты стандартного сигнала, например, цветовой тон в стандарте HSB. Поэтому все указанные кодировки сигналов встречаются в задачах распознавания.
Как следует из выше сказанного в современных системах с распознаванием изображений описание пикселя представляется 8-16 битами, которое может первичным преобразованием увеличиваться до
24-32 битного.
Распознаваемый объект представлен ![]() пикселями. Тогда объем пространства исходов
пикселями. Тогда объем пространства исходов
![]() или
или ![]() .
.
Специфика описания ситуации в задачах распознавания образов и принятия решений в значительной величине объема пространства исходов. Даже для сегмента описания объекта ![]() и с 24 - битным представлением пикселя он превышает
и с 24 - битным представлением пикселя он превышает ![]() .
.
Наряду с пространством исходов в математической статистике вводятся понятия ![]() -
- ![]() - алгебры подмножеств заданных на
- алгебры подмножеств заданных на ![]() . Которое определяет совокупность подмножеств множества
. Которое определяет совокупность подмножеств множества ![]() , базирующихся на теоретико-множественных операциях – объединении, пересечении, образовании дополнения и замкнутых относительно счетных объединений. В ТПР особенно актуален расчет метрики пространства, она определяет расстояния между объектами и в конечном итоге потери при не правильных решениях.
, базирующихся на теоретико-множественных операциях – объединении, пересечении, образовании дополнения и замкнутых относительно счетных объединений. В ТПР особенно актуален расчет метрики пространства, она определяет расстояния между объектами и в конечном итоге потери при не правильных решениях.
Третий объект ![]() - вероятность на
- вероятность на ![]() .
.
Набор объектов ![]() называется вероятностной моделью или вероятностным пространством задачи и полностью описывает ситуацию, если определены в нем все рассматриваемые классы, цели и потери.
называется вероятностной моделью или вероятностным пространством задачи и полностью описывает ситуацию, если определены в нем все рассматриваемые классы, цели и потери.
Обозначим результаты наблюдения, заданные в пространстве исходов, ![]() , где
, где ![]() ,
, ![]() - целые положительные числа. Для текущего наблюдения моменты съема информации будем считать расположенными во времени равномерно. Отсчет
- целые положительные числа. Для текущего наблюдения моменты съема информации будем считать расположенными во времени равномерно. Отсчет ![]() будем вести от нуля в каждом новом наблюдении. Разность
будем вести от нуля в каждом новом наблюдении. Разность  или
или  индексирует данные опыта, которые или предшествовали текущему наблюдению, или отстоят от текущего отсчета на расстоянии большем, чем расстояние влияния (корреляции)
индексирует данные опыта, которые или предшествовали текущему наблюдению, или отстоят от текущего отсчета на расстоянии большем, чем расстояние влияния (корреляции) ![]() . При
. При ![]() мы имеем текущую обучающую выборку, которая влияет на вывод в момент времени
мы имеем текущую обучающую выборку, которая влияет на вывод в момент времени ![]() .
.
Данные опыта, дополненные оценками результатов распознавания, принятия решений и составляют априорную информацию об объекте исследования на момент начала текущего наблюдения. Как следует из определения, вероятностное пространство можно считать заданным если известно ![]() для всех распознаваемых классов, ситуаций (
для всех распознаваемых классов, ситуаций (![]() - индекс класса). Исследователь сам решает интегральную или дифференциальную форму описания (функция распределения или плотность вероятности) использовать на практике. Однако большее распространение получила дифференциальная форма. Она более наглядна. Рассмотрим несколько часто используемых функций распределения вероятности.
- индекс класса). Исследователь сам решает интегральную или дифференциальную форму описания (функция распределения или плотность вероятности) использовать на практике. Однако большее распространение получила дифференциальная форма. Она более наглядна. Рассмотрим несколько часто используемых функций распределения вероятности.
Нормальное распределение.
 ,
,
Рис. 5. Нормированная плотность одномерного нормального распределения
(![]() =1,
=1, ![]() =0)
=0)
Его плотность (рис. 5) зависит от двух параметров ![]() - среднеквадратичного отклонения и
- среднеквадратичного отклонения и ![]() - математического ожидания.
- математического ожидания.
Вид нормированной функции распределения для нормального закона приведен на рис. 6.
приведен на рис. 6.
Рис. 6. Нормированная интегральная функция одномерного нормального распределения (![]() =1,
=1, ![]() =0)
=0)
Нормальный закон в ТРО и ТПР используется довольно часто. Он хорошо подходит для оценки симметричных, много причинных случайных событий при слабом доминировании какой либо из причин. В описании шумовых сигналов, подчиняющихся нормальному закону, утвердился термин – белый шум (обычно шум от многих источников практически равной энергии).
В игровых ситуациях нередко приходится иметь дело с событиями, образами, плотность распределения вероятности появления которых близка к равномерному закону распределения.
На рис 7-8 приведены нормированные функции дифференциальная и интегральная для равномерного распределения вероятности.
|
|
Рис. 7. Нормированная плотность одномерного равномерного распределения ( |
Рис. 8. Нормированная интегральная функция одномерного равномерного распределения ( |
Равномерное распределение вероятности задается как правило на слитном участке оси пространства исходов. Хотя такой признак не обязателен, в сложных системах отдельные участки на оси могут быть запрещены и события в них не появляются.
Для равномерного закона при нулевом значении центра интервала
 , где
, где ![]() - ширина полуинтервала.
- ширина полуинтервала.
Это примеры симметричных законов распределения. Многие образы имеют тенденцию к многочисленности на границе интервала своего существования. К ним относятся многие биологические объекты, природные включения (например, камешки и т. п. в пластах полезных ископаемых), отсортированные по размеру. На рис. 9, 10 приведен вид кривых экспоненциального закона распределения, практически хорошо подходящий для указанных случаев.
|
|
Рис. 9. Нормированная плотность одномерного экспоненциального распределения ( |
Рис. 10. Нормированная интегральная функция одномерного экспоненциального распределения ( |

Экспоненциальный закон распределения
![]() , (
, (![]() ,
, ![]() ),
),
где ![]() - параметр, имеющий размерность, обратную размерности оси
- параметр, имеющий размерность, обратную размерности оси ![]() и определяющий разброс случайной величины.
и определяющий разброс случайной величины.
Для удобства сравнения, все примеры (рис. 7-10) приведены с тем же параметром ![]()
![]() 1, что и пример нормального закона распределения (рис. 5, 6).
1, что и пример нормального закона распределения (рис. 5, 6).
Но реальные образы как правило многомерны. В практике обработки изображений наибольшее распространение находят двумерные функции описания яркости и соответственно двумерные распределения вероятности появления простейших образов.
На рис. 11, 12 представлено изображение и распределение интенсивности в сечении сформированного лазерного пучка, часто используемого в сканирующих системах. Оно близко по форме к двумерной функции плотность нормального распределения.

Рис.11. Изображение зондирующего лазерного пучка (пиксель)
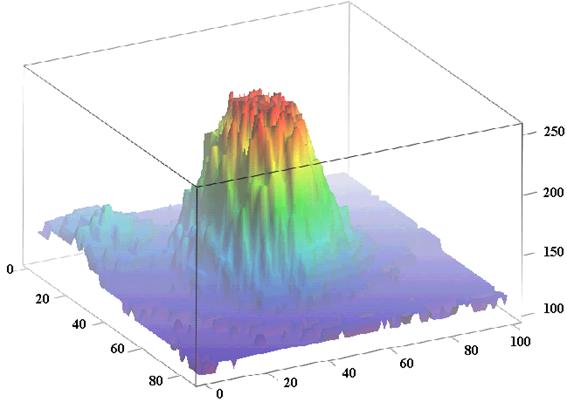
Рис.12. Распределение интенсивности в приделах пикселя
| |
| |
Двумерные функции распределения учитывают взаимное влияние выпадения у текущего случайного события определенной координаты по одной оси от величины на второй. Наиболее просто это пояснить на примере.
 где
где ![]() <1 – коэффициент корреляции координат
<1 – коэффициент корреляции координат ![]() случайного события,
случайного события, ![]() >0 – среднеквадратичное отклонение (стандартное отклонение) по оси
>0 – среднеквадратичное отклонение (стандартное отклонение) по оси ![]() ,
, ![]() - математическое ожидание по оси
- математическое ожидание по оси ![]() .
.
Для непрерывного представления осей пространства исходов
 ,
,
где  - взаимная корреляционная функция.
- взаимная корреляционная функция.
Степень взаимосвязи между параметрами точек в пространстве исходов уменьшается по мере увеличения расстояния между ними. Обще принято считать независимыми события разнесенные в пространстве исходов на наименьшее расстояние, на котором ![]() (
(![]() - допустимый в анализе коэффициент ошибки). Это расстояние получило название радиуса корреляции. События разнесенные на расстояние большее, чем радиус корреляции принято считать не зависимыми.
- допустимый в анализе коэффициент ошибки). Это расстояние получило название радиуса корреляции. События разнесенные на расстояние большее, чем радиус корреляции принято считать не зависимыми.
В задачах распознавания образов взаимосвязь не редко сохраняется в приделах всего сегмента образа. Под сегментом образа будем понимать участок пространства минимальных размеров, описывающей рассматриваемый образ. Например, сохраняется связь цветовых характеристик пикселей биологического, ботанического объекта по всему объему при его конкретной реализации в большей степени, чем между различными объектами конкретного класса. Еще больше расстояние и степень связи у искусственных объектов. Это необходимо учитывать при проведении исследований. Проведя оценку цветовых характеристик пикселей в приделах одного объекта нельзя считать выборки не зависимыми. Только исследование многих объектов дает достоверную информацию для описания характеристик класса.
Функции распределения вероятности в технических системах могут быть заданы аналитически или таблично. В практике же статистического анализа более принято использовать функционалы от них.
2.2. Оценка параметров и функций в анализе ситуаций
Наиболее употребимы определения точек ожидания появления событий, это математическое ожидание, медиана, мода. Для одномерного пространства исходов это скаляры, для многомерного - вектора.
Математическое ожидание ![]() можно определить по плотности функции распределения -
можно определить по плотности функции распределения -  , или по выборке размером
, или по выборке размером ![]() -
-  , где
, где ![]() - порядковый номер зафиксированного события
- порядковый номер зафиксированного события ![]() ,
, ![]() изменяется от 0 до
изменяется от 0 до ![]() , недостоверные отсчеты не фиксируются. Данная характеристика получила еще название абсциссы центра тяжести плотности распределения случайной величины. Не достоверные выбросы, которые могут появляться в ряде случаев сильно смещают этот параметр. Математическое ожидание, как основная характеристика свойства объекта часто используется в задачах с многократным повторением процедур распознавания или принятия решения.
, недостоверные отсчеты не фиксируются. Данная характеристика получила еще название абсциссы центра тяжести плотности распределения случайной величины. Не достоверные выбросы, которые могут появляться в ряде случаев сильно смещают этот параметр. Математическое ожидание, как основная характеристика свойства объекта часто используется в задачах с многократным повторением процедур распознавания или принятия решения.
Медиана (![]() ) определяет координаты точки, относительно которой появление событий справа и слева равновероятно. Другое определение – абсцисса прямой, параллельной оси ординат и делящей фигуру под плотностью вероятности на две одинаковой площади. Для возрастающего ряда
) определяет координаты точки, относительно которой появление событий справа и слева равновероятно. Другое определение – абсцисса прямой, параллельной оси ординат и делящей фигуру под плотностью вероятности на две одинаковой площади. Для возрастающего ряда ![]() без интерполяции можно записать:
без интерполяции можно записать:
 ,
,
где ![]() ,
, ![]() - границы интервала проявления
- границы интервала проявления ![]() , знак
, знак ![]() выделяет условие, которому должен удовлетворить переменная, в данном случае
выделяет условие, которому должен удовлетворить переменная, в данном случае ![]() выбираются только те, для которых
выбираются только те, для которых  . Ориентация на медиану оправдана тогда, когда величина отклонения случайной величины от интервала положения медианы не играет роли и важно только попадание в цель. При этом процедура распознавания применяется многократно. Медиана более устойчивая к аномальным явлениям характеристика, чем математическое ожидание.
. Ориентация на медиану оправдана тогда, когда величина отклонения случайной величины от интервала положения медианы не играет роли и важно только попадание в цель. При этом процедура распознавания применяется многократно. Медиана более устойчивая к аномальным явлениям характеристика, чем математическое ожидание.
Мода (![]() ) выделяет точку или отрезок на оси, на котором величина плотности вероятности имеет максимальное значение. Другое определение – абсцисса наиболее вероятного события.
) выделяет точку или отрезок на оси, на котором величина плотности вероятности имеет максимальное значение. Другое определение – абсцисса наиболее вероятного события.
![]() .
.
Мода часто выбирается в качестве цели при однократном применении решения. Эта характеристика наиболее чувствительна к помехам и не четкости информации, чем математическое ожидание.
Перечисленные параметры оценивают координату ожидаемого результата. Возможна в практическое применение и их комбинации, как нелинейная так и линейная, например, величина ![]() :
:
![]() ,
,
где ![]() ,
, ![]() ,
, ![]() - коэффициенты доверия и
- коэффициенты доверия и  .
.
Вторым по важности параметром является оценка ожидания разброса случайной величины. Эти оценка могут быть выражена числом, или интервалом на оси абсцисс, а для многомерных величин эллипсоидом, нередко носящим имя эллипсоида рассеяния.
На практике наибольшее применение получили функционалы вида
 или
или  ,
,
где ![]() - номер зафиксированного события (0-n),
- номер зафиксированного события (0-n),
![]() - номер канала,
- номер канала,
![]() ,
, ![]() - абсцисса канала, вероятность попадания события в канал, на графике плотности вероятности (0-g),
- абсцисса канала, вероятность попадания события в канал, на графике плотности вероятности (0-g),
![]() - показатель степени, положительная величина, целая или дробная, определяет метрику данного критерия.
- показатель степени, положительная величина, целая или дробная, определяет метрику данного критерия.
При ![]() =1, говорят об оценке разброса через величину среднего арифметического отклонения, при
=1, говорят об оценке разброса через величину среднего арифметического отклонения, при ![]() =2, оценивается разброс через величину среднеквадратичного или стандартного отклонения. Чем выше величина
=2, оценивается разброс через величину среднеквадратичного или стандартного отклонения. Чем выше величина ![]() , тем более влияют выбросы в измерениях и соответственно величина отклонения.
, тем более влияют выбросы в измерениях и соответственно величина отклонения.
Определим усредненную симметричную оценку параметра разброса ![]() случайной величины при наличии неопределенности в задании коэффициента
случайной величины при наличии неопределенности в задании коэффициента ![]() .
.
 ,
,
где ![]() коэффициенты доверия оценки отклонения с
коэффициенты доверия оценки отклонения с ![]() - показателем степени и
- показателем степени и  ;
; ![]() - порядковый номер функционала со степенным коэффициентом
- порядковый номер функционала со степенным коэффициентом ![]() ,
, ![]() изменяется от 1 до
изменяется от 1 до ![]() - числа конкурирующих оценок.
- числа конкурирующих оценок.
Оценка интервала (его границ), существования проявлений объектов исследуемого события, обычно ведется при задании ограничения на вероятность появления события вне интервала или внутри интервала.
![]()
Рис.13. Интервалы анализа
Для одномерного случая с равным распределением вероятности ошибки определения интервала справа и слева границы доверительного интервала можно определить, как
 ;
;
 ,
,
где ![]() - заданная вероятность ошибки, min_x, max_x границы интервала учета событий.
- заданная вероятность ошибки, min_x, max_x границы интервала учета событий.
Определение доверительного интервала позволяет уменьшить пространство исходов.
Очень часто одно из граничных значений координаты появления события берется за исходную точку для осторожного принятия решения, которое обычно ориентируется на наихудшее стечение обстоятельств. Эта координата соответствует появлению наиболее не желательного события. В этом случае вводится понятие допустимой вероятности появления более неблагоприятного события, чем те которые учитываются. Исходя из этого ограничения и определяется наиболее важная граница доверительного интервала.
Наряду с естественными системами координат, описывающими пространство исходов, используются и искусственные системы, производные от естественных. Например, из координат трехмерного пространства и времени формируются системы пространственных и временных частот.
В таких системах так же задаются интервалы существования объектов одного класса.
2.3. Статистические исследования при формировании описания образов и ситуаций
Одно из ключевых понятий теории распознавания образов - понятие класса. Это искусственный объект удерживающий отличительные свойства группы объектов подлежащих распознаванию, как образ с одним именем. Отличительные свойства, участвующие в распознавании, получили название признаков, а их набор – алфавита признаков.
|
|
Рис.14. Сегмент в поле изображения |
Рис.15. Сегмент в памяти вычислителя |
Изображения после ввода их в память компьютеров, ЦПС, микроконтроллеров имеют вид слитного массива с по пиксельным описанием. Интуитивно и, как показывает практика, более корректно при программировании его представить двумерным массивом, состоящим из строк и столбцов.
Сегментация неизбежный атрибут обработки изображений, широко применяемый при распознавании образов. Разбиение изображения на фрагменты позволяет ограничить размер исходных файлов. В выделенных сегментах, содержащих исследуемые объекты, и проводится их дальнейшая обработка. Это позволяет сократить объем пространства исходов и понизить вычислительную нагрузку на систему обработки данных.
Простейшее формирование сегментов для последующей обработки заключается в выделении прямоугольного окна, перемещающегося по массиву.
Пусть координата столбца – x отсчитывается слева направо, координата строки – y сверху вниз. Сформируем бегущий сегмент и зафиксируем его на характерных участках объектов.
Пусть исходное изображение имеет размеры ym, xm. Назначим размеры сегмента ys, xs и зададим шаг сегмента по столбцу и строке – hy, hx. Размер строки анализа xm равен целому числу шагов hx плюс размер сегмента xs. Число строк анализа ym равно целому числу шагов hy плюс размер сегмента ys.
Общее количество сегментов в строке nx, в столбце ny и по полю ns будут равны:
 ,
,
где floor – целая часть числа.
Введем текущий номер сегмента j от нуля и определим координаты первого пикселя сегмента yj, xj:
 ,
,  ,
,
где mod(x, a) – остаток от x по модулю a.
Сегмент с текущим номером j (например: r(j)) сформируем как субматрицу из общей матрицы (R), указав начало и конец субматрицы по столбцу и строке:
![]() .
.
Реальный адрес ячеек в памяти для последнего пикселя в строке, если адрес первого пикселя ![]() ,
,
 ,
,
где ![]() - размер описания пикселя в байтах.
- размер описания пикселя в байтах.
Адрес первого пикселя (![]() ) сегмента в памяти устройства распознавания на
) сегмента в памяти устройства распознавания на ![]() шаге
шаге
 .
.
Адрес первого пикселя следующей строки данного сегмента
 .
.
Рассмотрим методику формирования описаний объектов на примере задачи сортировки интегральных схем различных типов. На рис.16. представлено изображение корпусов различных микросхем. Ниже в таблице 2 представлены выбранные сегменты корпусов, фона и гистограмм ы цветовых составляющих их описаний.
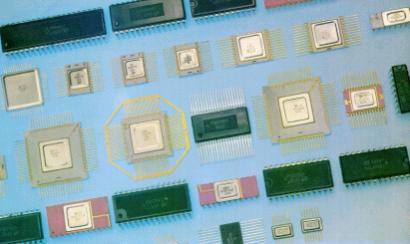
Рис.16. Корпуса интегральных микросхем
Таблица 2
Металл | Фон | Пластик | Керамика |
1 | 2 | 3 | 4 |
|
|
|
|
|
|
|
|
|
|
|
|
В таблице 3 и на рисунках 17-19 проведены величины интегральных параметров и их взаимное положение в пространстве исходов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
