

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рассмотрим пример расчета геометрических характеристик изображения текста. Определим величину межстрочечного интервала и координаты центров строк.
Рис. 45. Изображение анализируемого текста
Рис. 46. Интегральный сигнал
Рис. 47. Частотный спектр интегрального сигнала
На рис. 45 представлено изображение текста. Как уже указывалось, возможность распознавания можно улучшить, интегрируя участки изображения, в данном случае в направлении перпендикулярном направлению анализа. Вычислим интегральный сигнал ![]() , он также приведен на рис. 46. На данном сигнале отчетливо видно хорошее различие заполненных черными точками текста участков.
, он также приведен на рис. 46. На данном сигнале отчетливо видно хорошее различие заполненных черными точками текста участков.
Переходя в частотное пространство определим величину интервала между строками. Уменьшим размер вектора до 64 (кратно 2 в степени n), и вычислим модуль F2 частотного спектра сигнала
![]() ,
,
где ![]() .
.
![]() ,
,
где ![]() - Фурье образ Y2f, а k=0..c и
- Фурье образ Y2f, а k=0..c и ![]() - индекс последнего элемента вектора (рис. 47).
- индекс последнего элемента вектора (рис. 47).
Интервал между строками в пикселях - h равен:
 ,
,
где ![]() - массив нулей с координатой максимума частотного спектра. В нашем случае h=13.
- массив нулей с координатой максимума частотного спектра. В нашем случае h=13.
3.4. Распознавание объектов по цвету
Понятие цвета связано с селекцией наблюдаемого излучения в определенном достаточно локальном диапазоне длин волн или наборе поддиапазонов. Цветовая компонента может удерживать информацию о энергии излучения
 ,
,
где i – номер компонента (от 1 до N),
![]() – спектральная чувствительность
– спектральная чувствительность![]() i – канала,
i – канала,
![]() - спектральная плотность потока от j – го объекта попавшая в i – канал,
- спектральная плотность потока от j – го объекта попавшая в i – канал,
λ – длина волны оптического излучения,
![]() ...
...![]() – рабочий диапазон длин волн.
– рабочий диапазон длин волн.
При отказе от информации о общем уровне энергии переходят в пространство цветов. Это понижает размерность исходного пространства на единицу и облегчает процедуру распознавания, если распознавание ведется только по цветовым признакам.
Сформируем нормированные, не зависящие от общего уровня сигнала цветовые составляющие:
 .
.
Величина N определяет размерность цветового пространства ![]() до нормировки или
до нормировки или ![]() после нормировки (
после нормировки (![]() ). Часто говорят N – компонентном цветовом пространстве.
). Часто говорят N – компонентном цветовом пространстве.
Очень распространена трехцветная модель RGB в видимом диапазоне длин волн оптического излучения. Она отображает чувствительность рецепторов глаза человека.
Для данного диапазона создана недорогая аппаратура считывания и генерации изображений, разработаны стандарты описаний файлов и имеется множество графических программных продуктов для работы с ними. Как правило информационное наполнение изображений полученных не в RGB пространстве переносят в него для более естественного анализа.
Человеческий глаз состоит примерно из 7 млн. колбочек и 120 млн. палочек. Функция палочек заключается в «ночном зрении» - светочувствительности и приспособлении к окружающей яркости.
Функция колбочек - «дневное зрение» - восприятие цвета, формы и деталей предмета. В них заложены три типа воспринимающих элементов, каждое из которых воспринимает световое излучение только определенной длины волн, соответствующих одному из трех основных цветов: красному, зеленому и синему. Остальные цвета и оттенки получаются смешением этих трех.
Воспринимая цветовую информацию в диапазоне волн примерно от 380 нм (начало синих цветов) до 760 нм (конец красных цветов) человеческий глаз имеет наилучшую чувствительность имеет в районе 550 нм (зона зеленых цвет).
Немецкий математик Грассман в 1848 году на основе опытов вывел следующие закономерности восприятия цвета человеком, которые могут с определенными оговорками расширены на любую перекрывающуюся трехцветную систему:
Трехмерность природы цвета. Глаз реагирует на три различных цветовых составляющих. Примеры: красный, зеленый и синий цвета; цветовой тон (доминирующая длина волны), насыщенность (чистоту) и яркость (светлость).
Четыре цвета всегда линейно зависимы, то есть ![]() , где
, где ![]() . Для смеси двух цветов
. Для смеси двух цветов ![]() и
и ![]() имеет место равенство:
имеет место равенство:
 .
.
Если цвет ![]() равен цвету
равен цвету ![]() и цвет
и цвет ![]() тоже равен цвету
тоже равен цвету ![]() , то
, то ![]() цвет
цвет ![]() равен цвету
равен цвету ![]() независимо от структуры спектров энергии
независимо от структуры спектров энергии ![]() . Данная зависимость предполагает и наличие отрицательных сигналов среди слагаемых.
. Данная зависимость предполагает и наличие отрицательных сигналов среди слагаемых.
Цветовое пространство непрерывно. Если в смеси трех цветов один непрерывно изменяется, а другие остаются постоянными, то цвет смеси будет меняться непрерывно.
Основной рабочей цветовой моделью является модель RGB. Данная модель построена на копировании строения глаза. Она идеально удобна для светящихся поверхностей (мониторы, телевизоры, цветные лампы и т. п.).
В основе ее лежат три цвета: Red - красный, Green- зеленый и Blue - синий. Еще Ломоносов заметил, что с помощью этих трех основных цветов можно получить почти весь видимый спектр. Например, желтый цвет - это сложение красного и зеленого.
Поэтому RGB называют аддитивной системой смешения цветов.
Чаще всего данную модель представляют в виде единичного куба с ортами: (1;0;0)- красный, (0;1;0)- зеленый, (0;0;1)- синий и началом (0;0;0)- черный.
В процедурах распознавания могут оказаться более эффективны и другие модели.
Как признаки могут выступать цветовой тон - преобладающий основной цвет (длину волны, преобладающей в излучении); насыщенность цвета - чем она больше, тем «чище» цвет (то есть ближе к тоновой волне), например, у белого цвета - насыщенность= 0, так как невозможно выделить его цветовой тон. Введем, наконец, для завершения яркость (у черного цвета= 0, у белого=1).
Таким образом, мы построили трехмерное цветовое пространство HSV - Hue, Saturation, Volume (Тон, Насыщенность и Яркость).
Обычно его представляют в виде конуса. Начало координат - вершина конуса - черный цвет. Высота, направленная к основанию - яркость.
Точка пересечения высоты с основанием - белый цвет. На высоте находятся оттенки серого цвета от черного (вершина конуса) к белому. На окружности, ограничивающей основание конуса, находятся чистые цветовые тона: от красного (![]() ), через зеленый (
), через зеленый (![]() ), к синему (
), к синему (![]() ).
).
Радиус конуса - насыщенность цвета. С такой системой работают художники, меняя насыщенность с помощью белой краски, его оттенок с помощью черной и тон, комбинируя с основными цветами.
HSV часто представляют и в виде шестигранного конуса, у которого в основании лежит правильный шестиугольник с вершинами, соответствующими следующим цветам : красный - желтый - зеленый - голубой - синий – пурпурный.
Приведем формулы связи RGB и HSV, представленного в виде шестигранного конуса –
HSV в RGB:

RGB в HSV:
RGB в HLS:
HLS в RGB:
Пример перевода RGB в HSB. В данном формате RGB имеет на каждую из компонент R, G, B по 8 бит (256 уровней градации) - True Color. HSB представлен тремя плоскостями, соответствующими H, S, B, в виде черно/белых изображений с 256 уровнями градации .
Процедура отображения изображений в пространство RGB содержит однозначную операцию отображения пикселя, которая состоит в последовательности следующих шагов:
Ÿ формируются матрицы R, G, и B в двухмерном геометрическом пространстве;
Ÿ формируется новая матрица с числом столбцов равным числу уровней квантования первой цветовой составляющей и числом строк равным числу уровней квантования второй цветовой составляющей пикселя;
Ÿ матрица заполняется тегом отсутствия запроса ячейки, например, - 256 (число выбирается вне зоны существования уровней квантования третьей цветовой составляющей пикселя);
Ÿ в матрицу по координатам описания первой и второй цветовых составляющих записывается значение третьей цветовой составляющей пикселя.
Данная процедура может быть распространена и на все изображение, однако пиксели запрашивающие одинаковые координаты по значениям первой и второй цветовых составляющих будут конкурировать друг с другом по записи, преимущество отдается последнему запросу и информация о предыдущих запросах будет утеряна.
Искусственно можно устранить этот недостаток проверкой тега запроса ячейки, и при наличии факта предыдущего запроса кодировать информацию в ячейке, например, формируя число в позиционной системе счисления с основанием равным числу уровней квантования третьей цветовой составляющей пикселя +1 (для тега отсутствия запроса позиции). В дальнейшем мы будем допускать потерю части информации о предыдущих запросах.
|
|
Рис. 48. Кластеры объектов в RGB пространстве (однородный тон) |
Рис. 49. Кластеры объектов в RGB пространстве (керамический корпус микросхемы) |
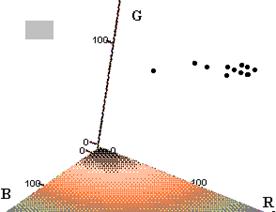
Рис. 50. Кластеры объектов в RGB пространстве (цветовой “хаос”)
На рис. 48, 49 приведен вид зон существования объектов в RGB пространстве там же приведены и исследуемые изображения.
Как видно они образуют соприкасающиеся группы точек. Для сравнения, на рис. 50 показано отображение цветового “хаоса”.
Матрица Z на рисунках рис. 48, 49 и 50 заполнена по формуле:
 .
.
Для упрощения в качестве тега отсутствия запроса ячейки принято число “0”, а информация о точках с  утеряна, имеет место и маскирование пикселями с
утеряна, имеет место и маскирование пикселями с ![]() предыдущих записей.
предыдущих записей.
В качестве решающих границ в трехмерном пространстве описания пикселей используются различные поверхности. Более просто, но с определенной потерей общности анализа, можно учитывать только следы точек на координатной плоскости (рис. 51, 52).
В этом случае решающие границы вырождаются в линии разделяющие следы точек на плоскости.
|
|
Рис. 51. Индикатор цвета |
Рис. 52. Индикатор цвета |
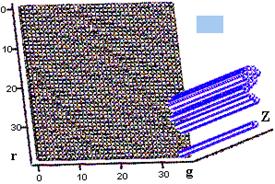
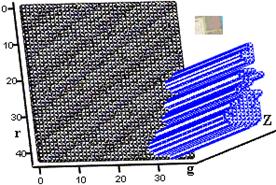
Рис. 53. Индикатор цвета ![]() на цветовой плоскости
на цветовой плоскости ![]() ( цветовой “хаос”)
( цветовой “хаос”)
Матрица Z на рисунках рис. 51, 52 и 53 заполнена по формуле:
![]() .
.
Оси цветов для представления индексов в целых числах умножены на 100.
Можно усложнить формулу и сохранить информацию о частотах появления в образах отдельных цветов. Выполняя последовательно преобразования
![]() ,
, ![]()
получим цветовые гистограммы образов, которые как сами так и их параметры могут войти в алфавит признаков.
На рис. 54 показан результат преобразования для изображения керамического корпуса.
Рис. 54. Цветовая гистограмма на цветовой плоскости ![]() ( керамический корпус микросхемы)
( керамический корпус микросхемы)
На рис. 60 для сравнения показан результат преобразования для фрагмента однородного фона. Очевидно их различие, как по виду цветовой гистограммы так и по параметрам оценок математического ожидания и дисперсии. Что обеспечивает уверенное различие объектов.
Рис. 55. Цветовая гистограмма на цветовой плоскости ![]() ( однородный фон)
( однородный фон)
Рис. 56. Вариант оформления работы по анализу цветовых гистограмм
Вариант несколько иного представления о цветовых компонентах описаний полей пикселей приведен на рис. 56. Отдельно анализируются сигналы в трехмерном цветовом пространстве и строятся гистограммы в соответствии с заданной по осям метрикой.
Простейшие задачи распознавания решаются сечением пространства признаков плоскостями, разделяющих зоны описаний классов, например, через задание порогов по R, G, B компонентам (рис. 57 пороги rs, gs, bs). Это сигналы по строке ![]() рисунка 16.
рисунка 16.
Рис. 57. Яркостные сигналы и пороговое задание гиперконуса принятия решений
В этом случае достаточно наглядно представляется гиперконус принятия решений. Назначая нижние и верхние границы существования классов получим прямоугольную область существования объектов класса. Однако многие ситуации значительно сложнее, и решающие функции приобретают вид сложных гиперповерхностей.
Сформируем прозрачную маску mask1 на распознаваемое здание (код 255 назначим прозрачным цветом, такое решение часто используется в графических редакторах):
![]() .
.
Результат выполнения операции после наложения маски приведен на рис. 58. Выделены металлические корпуса и пластинки, хотя в нижнем правом углу ложно обозначена зона однородного фона.
Рис. 58. Выделение зон металлических корпусов
Автоматическое задание фиксированных порогов по цветовым составляющим предполагает наличие алгоритмов определения уровня освещенности объектов. Но освещенность отдельных фрагментов объекта может значительно изменятся из-за его пространственного положения. Выходом может стать переход к распознаванию объектов в нормированном цветовом пространстве. На рис. 59 приведены нормированные сигналы r, g, b полученные из исходных R, G, B путем их деления на сумму R+G+B, вычисляемой для каждого пикселя.
Рис. 59. Нормированные цветовые сигналы
Как и в первом случае сформируем прозрачную маску но с относительными соотношениями:
![]() .
.
Рис. 60. Выделение зон металлических корпусов по цветовым сигналам
Результаты вычислений представлены на рис. 60. Как видно, отдельные элементы здания распознаны различными алгоритмами не однозначно.
Бесспорное преимущество второго метода в его независимости от освещенности объекта.
Первый метод косвенно использует информацию об освещенности пикселя и данный признак способствует лучшему распознаванию объектов в данном случае.
Перечислим перечень операций часто используемый при распознавании объектов в нормированном цветовом пространстве:
Ÿ вычислим сумму цветовых сигналов в точке;
Ÿ определим нормированные цветовые составляющие;
Ÿ назначим исключаемую из рассмотрения нормированную цветовую составляющую (обычно не учитывают цветовую составляющую в равной мере присущую всем объектам);
Ÿ понизим размерность цветового пространства на единицу;
Ÿ назначим новые координатные оси;
Ÿ отобразим следы объектов или их гистограммы в новой системе координат;
Далее проведем решающие границы и классифицируем объекты.
3.5. Распознавание объектов по типу индикатрисы отражения поверхности
Способность поверхности объектов по различному рассеивать падающее излучение так же в виде набора признаков может входить в алфавит признаков. Яркость поверхности зависит от направлении, под которым она наблюдается, и от направления падающих лучей. Можно описать эти зависимости в локальной системе координат на поверхности объекта (рис. 61).Рассмотрим нормаль n к поверхности и произвольную линию на ней. ![]()
Направления можно описать с помощью углов ![]()
![]() между лучом и нормалью и
между лучом и нормалью и ![]() между ортогональной проекцией луча на поверхность и линией на поверхности.
между ортогональной проекцией луча на поверхность и линией на поверхности.![]()
Эти углы называются полярным и азимутальным соответственно.
Рис. 61. Лучи отражения в системе координат нормали к поверхности
Они позволяют нам определить направления ![]() и
и ![]() под которыми свет падает на поверхность и излучается к наблюдателю (рис. 62).
под которыми свет падает на поверхность и излучается к наблюдателю (рис. 62).
Определим двух лучевую функцию отражательной способности (ДФОС), которая показывает изменение яркости поверхности при заданных направлениях наблюдения и освещения. Количество света, падающего на поверхность по направлению  (освещенность элементарного участка) обозначим
(освещенность элементарного участка) обозначим ![]() . Яркость поверхности, наблюдаемая в направлении
. Яркость поверхности, наблюдаемая в направлении ![]() , обозначим
, обозначим ![]() . ДФОС определится по формуле:
. ДФОС определится по формуле:
 .
.
Рис. 62. Падающий луч и один из лучей отраженного потока
Для многих поверхностей их яркость не меняется при повороте поверхности вокруг нормали. В этом случае ДФОС зависит не от ![]() и
и ![]() по отдельности, а от их разности
по отдельности, а от их разности![]() -
- ![]() . Это, в частности, верно для матовых и зеркально отражающих поверхностей, но не верно для поверхностей с ориентированной микроструктурой, например для некоторых минералов, (например, минерала тигровый глаз), или радужных перьев некоторых птиц.
. Это, в частности, верно для матовых и зеркально отражающих поверхностей, но не верно для поверхностей с ориентированной микроструктурой, например для некоторых минералов, (например, минерала тигровый глаз), или радужных перьев некоторых птиц.
В реальном случае могут существовать несколько точечных или даже протяженных источников, как например, лазерный зонд и фоновое освещение. В случае протяженного источника, чтобы получить ненулевое излучение поверхности, мы должны рассматривать ненулевой телесный угол. Рассмотрим бесконечно малую площадку размером ![]() по полярному и
по полярному и ![]() по азимутальному углам рис. 63.
по азимутальному углам рис. 63.
Эта площадка задает телесный угол ![]() . Если положить, что мощность излучения, приходящего по направлению
. Если положить, что мощность излучения, приходящего по направлению ![]() на единицу телесного угла, равняется
на единицу телесного угла, равняется ![]() то мощность, идущая от рассматриваемой площадки, будет равняться выражению
то мощность, идущая от рассматриваемой площадки, будет равняться выражению ![]() , а полная освещенность поверхности — выражению
, а полная освещенность поверхности — выражению
 .
.
Для получения яркости поверхности объекта необходимо проинтегрировать произведение ДФОС и освещенности по полусфере возможных направлений падения света. Таким образом:
 .
.
Рис. 63. Падающий луч и один из лучей отраженного потока
Идеальной ламбертовой поверхностью называется такая поверхность, кажущаяся яркость которой одинакова при любых направлениях наблюдения и которая отражает все падающие лучи, ничего не поглощая. Из этого определения следует, что ДФОС (![]() ) для такой поверхности должна быть константой.
) для такой поверхности должна быть константой.
Проинтегрируем яркость поверхности объекта по всем направлениям и приравняем полученную таким образом полную яркость полной освещенности.
 ,
,
или
 .
.
Используя соотношение 2sin![]() cos
cos![]() = sin2
= sin2![]() , получим
, получим ![]() . Итак, для идеальной ламбертовой поверхности
. Итак, для идеальной ламбертовой поверхности![]() . Заметим, что, поскольку ДФОС постоянна для ламбертовой поверхности, мы можем вычислить яркость L по освещенности
. Заметим, что, поскольку ДФОС постоянна для ламбертовой поверхности, мы можем вычислить яркость L по освещенности ![]() т. е.
т. е.  .
.
Модель идеальной ламбертовой и зеркальной поверхностей образуют как бы крайние точки в анализе отражающих свойств реальных поверхностей. Они часто используются при определении качества бумажного полотна и т. п.
ДФОС можно определить экспериментально, освещая образец интересующего нас материала и измеряя его яркость с помощью сенсора. При этом контролируются углы падения излучения и угол наблюдения.
Рассмотрим использование выше сказанного на конкретном примере. Пусть необходимо обнаружить следы масляной пленки на материале близком по отражающим характеристикам к ламбертовой поверхности. Появление пленки сглаживает неровности и итоговая поверхность приобретает свойства зеркала. Таким образом пленка приводит к изменению формы ДФОС. Включая анализируемый участок материала в оптическую схему формирования изображения, получим оптический прибор с изменяемыми параметрами.
Пусть в идеальном приборе с зеркальной поверхность изображение эталона (периодическая структура) имеет вид отклика представленного на рис. 64. Не однородность отклика обусловлена спецификой конкретной оптической схемы. На рисунке ![]() - сигнал с CCD – многоэлементного фотоприемника,
- сигнал с CCD – многоэлементного фотоприемника, ![]() - номер фотоприемника по строке толщина пленки указана в unit, 1 unit примерно равен 0,18 мкм.
- номер фотоприемника по строке толщина пленки указана в unit, 1 unit примерно равен 0,18 мкм.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
