
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На рис. 4 представлены результаты расчетов динамической концентрации напряжений в слое (плите), ослабленной отверстием кругового поперечного сечения при ![]() . Рис. 5 построен для слоя (плиты) с отверстием, поперечное сечение которого имеет вид квадрата со скругленными углами при
. Рис. 5 построен для слоя (плиты) с отверстием, поперечное сечение которого имеет вид квадрата со скругленными углами при  . Выделенными точками на вставках-схемах, как и ранее, обозначены положения точек, в которых проводились расчеты.
. Выделенными точками на вставках-схемах, как и ранее, обозначены положения точек, в которых проводились расчеты.
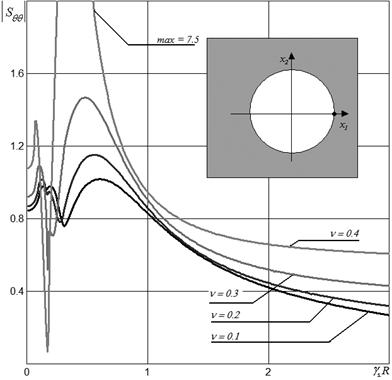
Рисунок 4 – Динамическая концентрация напряжений в плите (слое), ослабленном отверстием кругового поперечного сечения для различных значений коэффициента Пуассона
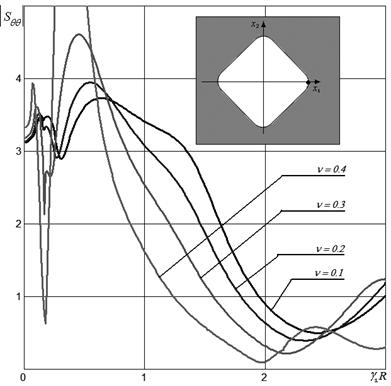
Рисунок 5 – Динамическая концентрация напряжений в плите (слое), ослабленном отверстием квадратного поперечного сечения (квадрат со скругленными углами) для различных значений коэффициента Пуассона
Для плиты, ослабленной отверстием кругового поперечного сечения, наблюдаем отчетливый рост амплитуд значений относительного окружного нормального напряжения с увеличением значений коэффициента Пуассона, причем данный эффект наблюдается как при малых частотах в окрестности «пиков», так и при больших частотах. С увеличением относительного волнового числа напряжения, рассчитанные для минимального ![]() и максимального значений
и максимального значений ![]() , отличаются по величине в два раза и более. Для плиты, ослабленной отверстием с поперечным сечением в виде квадрата со скругленными углами, наблюдаем несколько иную картину. При малых частотах, как и в случае кругового отверстия, прослеживается рост амплитуд значений относительного окружного напряжения с увеличением коэффициента Пуассона, в то время как при больших частотах отчетливо видим, что увеличение коэффициента Пуассона уменьшает амплитуду значений относительного окружного нормального напряжения почти вдвое. Таким образом, в случае использования материалов с большими значениями коэффициента Пуассона, можно сделать вывод о целесообразности проектирования плит, ослабленных отверстиями с поперечными сечениями в виде квадратов со скругленными углами, поскольку при высоких частотах это позволит существенно снизить напряжения, возникающие в подобных элементах пространственных конструкций.
, отличаются по величине в два раза и более. Для плиты, ослабленной отверстием с поперечным сечением в виде квадрата со скругленными углами, наблюдаем несколько иную картину. При малых частотах, как и в случае кругового отверстия, прослеживается рост амплитуд значений относительного окружного напряжения с увеличением коэффициента Пуассона, в то время как при больших частотах отчетливо видим, что увеличение коэффициента Пуассона уменьшает амплитуду значений относительного окружного нормального напряжения почти вдвое. Таким образом, в случае использования материалов с большими значениями коэффициента Пуассона, можно сделать вывод о целесообразности проектирования плит, ослабленных отверстиями с поперечными сечениями в виде квадратов со скругленными углами, поскольку при высоких частотах это позволит существенно снизить напряжения, возникающие в подобных элементах пространственных конструкций.
1.4 Выводы к разделу 1
Разработана методика решения динамической задачи связанной термоупругости с учетом конечной скорости распространения тепла для элементов пространственных конструкций. Построена система Ф-решений, при помощи которой граничная задача сведена к системе 4n одномерных сингулярных интегральных уравнений при каждом фиксированном n. Создана численная схема реализации полученного аналитического алгоритма и соответствующее прикладное программное обеспечение для проведения численного эксперимента. Исследованы амплитудно-частотные характеристики цилиндров конечной длины различных поперечных сечений, и рассмотрена динамическая концентрация напряжений для слоя с полостями различных поперечных сечений, показано влияние коэффициента Пуассона на распределение напряжений в таких телах. Результаты расчетов могут быть использованы в строительстве и машиностроении при расчете на прочность элементов конструкционных опор, фундаментов и кожухов машин и механизмов, работающих под воздействием механических и температурных нагрузок. Также полученные результаты станут основой для проведения дальнейших исследований в данной области.
2 Выбор конструктивных параметров летательных аппаратов на основе уравнений движения тела переменной массы
Исследование различных аспектов пространственного движения твердых тел постоянного и переменного состава остается одной из центральных проблем динамики твердого тела и имеет большое значение для прикладных задач механики полета управляемых и неуправляемых летательных аппаратов. В данном контексте можно утверждать, что вопрос выбора правильных конструктивных параметров летательных аппаратов является важной задачей, решение которой позволяет влиять на их движение и улучшать кучность. В работах [15, 16] приведены данные о факторах, влияющих на кучность летательных аппаратов. Вместе с тем в этих работах не рассматривается математический аппарат, позволяющий изучить их влияние на кучность. Что касается практических испытаний, в ходе которых определяются конкретные характеристики рассеивания, то они могут быть проведены только после создания летательного аппарата (ЛА) рассматриваемого типа, что приводит к увеличению затрат на проектирование управляемых и неуправляемых летательных аппаратов.
Авторами статьями предположена математическая модель движения тела переменной массы на основе современной методики, учитывающей как волновое сопротивление, так и сопротивление трения [17], что позволило определить коэффициенты аэродинамических сил и моментов действующих на ЛА в полете, а также рассчитать их инерционно-массовые характеристики. Это дало возможность оценить влияние конструктивных параметров на кучность ЛА и определить их допуски.
Дифференциальные уравнения движения ЛА, будем называть математической моделью движения ЛА.
Если за признак классификации взять постоянство массы ЛА в полёте, то можно говорить о математических моделях движения ЛА постоянной и переменной массы [14, 18, 21].
К основным теоремам, используемым при составлении уравнений движения ЛА, относятся теоремы об изменении количества движения, изменении кинетического момента, изменении кинетической энергии. Распространение перечисленных классических теорем на динамику ракет, принадлежащих к классу тел переменного состава (массы), проводится на основе так называемого принципа затвердевания, формулируемого следующим образом: уравнение движения тела переменного состава можно представлять в форме уравнений движения тела постоянного состава, имеющую мгновенно зафиксированную (затвердевшую) массу. В число сил, действующих на тело в рассматриваемый конкретный момент, включаются внешние силы, реактивные силы Кориолиса и вариационные силы [14, 15, 18].
Из источников, известных в настоящее время [15, 16], к причинам, вызывающим колебания неуправляемых ЛА относительно центра масс, относятся:
1. Эксцентриситет силы тяги относительно центра массы ЛА, создается благодаря тому, что вектор силы тяги не совпадает с центром массы ЛА.
2. Начальные возмущения в момент схода ЛА с направляющей.
3. Аэродинамическая асимметрия ЛА (перекос, деформация и несимметричность формы элементов стабилизатора и т. п.), и асимметрия центра масс.
Следует отметить, что эксцентриситет силы тяги и центра масс, а также аэродинамическая асимметрия, обусловлены производственными и эксплуатационными причинами.
Для изучения влияния перечисленных факторов на кучность использована система дифференциальных уравнений (СДУ) движения неоперенного ЛА в возмущенной среде.
Получение математических моделей, описывающих состояние ЛА, имеет своей целью, как правило, определение искомых параметров движения: компонентов скорости движения центра масс, угловой скорости ЛА относительно его центра масс, углов, характеризующих ориентацию аппарата, и, наконец, координат центра масс, по которым может быть построена траектория движения ЛА. В качестве независимой переменной (главного аргумента) в математической модели движения ЛА выступает текущее время t. Основу математической модели, характеризующей состояние ЛА, составляют дифференциальные уравнения движения. Для того чтобы получить их решения в конечной форме, должны быть однозначно заданы начальные условия и определены силы, находящиеся в правых частях дифференциальных уравнений. При этом несущественно, в какой форме задаются воздействия (детерминированный или стохастический подход), важно, чтобы принятая модель сил характеризовалась полной информацией об их значениях в рассматриваемом интервале времени. Именно эта полная совокупность сил, определяющая вид входных воздействий, и будет характеризовать при помощи фазовых координат состояние ЛА в данный и последующий моменты времени [14, 17].
Дифференциальные уравнения пространственного движения получены проектированием на оси полускоростной и полусвязанной систем координат (рис. 6, 7) [14, 15, 16] общих векторных уравнений, выражающих содержание теорем о производных по времени от векторов количества и момента количества движения:
 (2.1)
(2.1)
Рисунок 6 – Положение центра масс при асимметрии
На рис. 6 введены следующие обозначения: С0 – несмещённое положение центра масс ЛА; С – смещённое положение центра масс ЛА; ε1, ε2 – линейное значение эксцентриситета центра масс.
В качестве составляющих главного вектора действующих сил ![]() были учтены такие силы: сила лобового сопротивления; подъемная сила; сила тяги; сила Кориолиса, возникающая за счет истечения пороховых газов; силы, вызванные эксцентриситетом тяги и центра масс; силы, вызванные вращением Земли.
были учтены такие силы: сила лобового сопротивления; подъемная сила; сила тяги; сила Кориолиса, возникающая за счет истечения пороховых газов; силы, вызванные эксцентриситетом тяги и центра масс; силы, вызванные вращением Земли.
Составляющими главного момента ![]() количества движения учитывались следующие моменты: опрокидывающий (для оперенных ЛА – стабилизирующий) момент; экваториальный демпфирующий момент; момент трения; момент Кориолиса, возникающий за счет истечения пороховых газов; моменты, вызванные эксцентриситетом тяги и масс; моменты, вызванные вращением Земли.
количества движения учитывались следующие моменты: опрокидывающий (для оперенных ЛА – стабилизирующий) момент; экваториальный демпфирующий момент; момент трения; момент Кориолиса, возникающий за счет истечения пороховых газов; моменты, вызванные эксцентриситетом тяги и масс; моменты, вызванные вращением Земли.
Введем в рассмотрение полусвязанные оси (рис. 7).
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
