
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Система уравнений (2.5) отличается от системы (2.3) наличием в правой части слагаемых, обусловленных асимметрией масс. Заметим также, что в результате асимметрии в правой части первого уравнения системы (2.5) появляется почти постоянный подкручивающий момент, обусловленный силой тяги  , поэтому даже не вращающийся оперенные ЛА при наличии асимметрии получает с течением времени угловую скорость собственного вращения.
, поэтому даже не вращающийся оперенные ЛА при наличии асимметрии получает с течением времени угловую скорость собственного вращения.
При наличии разного рода асимметрии, особенно если система попадает в "резонансный" режим, существенно изменяется правая часть уравнения, описывающего изменения скорости полета. Последнее означает, что движение оперенных ЛА будет происходить не по расчетной траектории, и в результате кучность ухудшится [17].
2.3 Влияние силы и момента Кориолиса за счет истечения газов из сопла
Сила и момент Кориолиса возникают в результате движения пороховых газов по камере и соплу (при наличии угловой скорости вращения ЛА, которую обозначим Ω) (рис. 8).
Элементарная сила Кориолиса ![]() определится по зависимости:
определится по зависимости:
![]() (2.6)
(2.6)
где dm = ρ∙σ; ρ – плотность газов, σ – свободная от пороха площадь сечения, U – относительная скорость истечения газов.
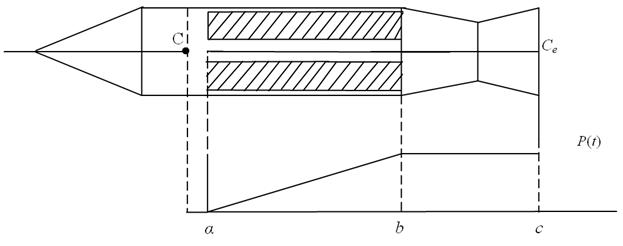
Рисунок 8 – Параметры истечения пороховых газов через сопло (Се – центр выходного сечения сопла; С – центр тяжести)
С учётом размеров пороховой шашки получим силу ![]() и момент Кориолиса
и момент Кориолиса ![]() за счёт истечения газов [17]:
за счёт истечения газов [17]:
|
где  ,
,  ;
; ![]() массовый расход газов через сопло;
массовый расход газов через сопло; ![]() эффективная скорость истечения газов;
эффективная скорость истечения газов; ![]() – расстояния, указанные на рис. 8.
– расстояния, указанные на рис. 8.
Сравнительная оценка показала, что влияние силы Кориолиса невелико и ею можно пренебречь, а момент силы Кориолиса можно сравнить с экваториальным демпфирующим моментом и его необходимо учитывать [17].
Учитывая уравнения (2.3), (2.5), (2.7) и данные работы [17], система дифференциальных уравнений пространственного движения не управляемых ЛА будет иметь вид:
1. 
2. 
3. 
4. 

5.
6. 
7. 
8. 
|
10. 
|
|
12. 
13. 
где








![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
В данной системе дифференциальных уравнений описано движение тела переменной массы, в которой учтены силы лобового сопротивления, подъемная сила, сила тяги, сила Кориолиса за счёт истечения пороховых газов, силы, вызванные эксцентриситетом тяги и центра масс, силы, вызванные вращением Земли, опрокидывающий (для оперенных ЛА – стабилизирующий) момент, экваториальный демпфирующий момент, момент трения, момент Кориолиса за счёт истечения пороховых газов, моменты, вызванные эксцентриситетом тяги и центра масс, моменты, вызванные вращением Земли. Все применяемые обозначения введены в работах [15, 16, 17].
Система дифференциальных уравнений была решена при помощи численного интегрирования методом Рунге-Кутта четвертого порядка. Компьютерное моделирование процесса движения летательных аппаратов с различными способами стабилизации под действием всей совокупности изменений конструктивных параметров, которые задаются стохастически, с помощью зависимостей (2.4, 2.8) от дальностей полёта, различных тормозных колец (без тормозного кольца, с большим или малым тормозным кольцом) показало, что для получения оптимальных характеристик рассеивания по дальности ![]() и по направлению
и по направлению ![]() , а также для обеспечения устойчивого полета оперенных ЛА, эксцентриситет силы тяги не должен превышать ∆
, а также для обеспечения устойчивого полета оперенных ЛА, эксцентриситет силы тяги не должен превышать ∆![]() мм, угловой аэродинамический эксцентриситет
мм, угловой аэродинамический эксцентриситет  (рис. 9, 12), а линейный эксцентриситет центра масс не должен превышать
(рис. 9, 12), а линейный эксцентриситет центра масс не должен превышать  ; угловой
; угловой  (рис 10, 13). При этом экспериментальные характеристики рассеивания
(рис 10, 13). При этом экспериментальные характеристики рассеивания ![]() ,
, ![]() взяты по данным работ [19, 20].
взяты по данным работ [19, 20].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
