


при ограничениях
 ,
,  .
.
Ограничения могут быть не только неравенствами, но также и равенствами. Условия неотрицательности неизвестных  , или
, или ![]() , если они должны выполняться по смыслу задачи, могут быть включены в систему ограничений, а могут выписываться отдельно. Множество всех допустимых векторов будем называть допустимой областью в
, если они должны выполняться по смыслу задачи, могут быть включены в систему ограничений, а могут выписываться отдельно. Множество всех допустимых векторов будем называть допустимой областью в ![]() -мерном векторном пространстве и обозначать буквой
-мерном векторном пространстве и обозначать буквой  .
.
Таким образом, в самом широком смысле общая задача нелинейной оптимизации заключается в отыскании экстремума целевой функции при заданных ограничениях в виде равенств или неравенств.
Переменные ![]() ,
, ![]() , могут быть проектными параметрами некоторого процесса, показаниями приборов и т. д. Целевая функция может представлять собой стоимость, вес, прибыль и т. д. Ограничения составляются из ограниченности ресурсов, из технических требований, условий работы, пропускной способности, присущих процессу.
, могут быть проектными параметрами некоторого процесса, показаниями приборов и т. д. Целевая функция может представлять собой стоимость, вес, прибыль и т. д. Ограничения составляются из ограниченности ресурсов, из технических требований, условий работы, пропускной способности, присущих процессу.
В задачах нелинейной оптимизации следует отличать понятие глобального экстремума от локального экстремума. Точка  называется точкой локального максимума (локального минимума) функции
называется точкой локального максимума (локального минимума) функции  , если найдется такая окрестность этой точки (на плоскости окрестностью может служить круг с центром в точке
, если найдется такая окрестность этой точки (на плоскости окрестностью может служить круг с центром в точке ![]() ), что для всех
), что для всех ![]() , принадлежащих
, принадлежащих ![]() и этой окрестности, выполняется неравенство
и этой окрестности, выполняется неравенство  (соответственно для локального минимума
(соответственно для локального минимума ![]() ). Для функции двух переменных можно привести простую геометрическую иллюстрацию понятий глобального и локального максимума (минимума) (рис.2.11). Графиком функции двух переменных
). Для функции двух переменных можно привести простую геометрическую иллюстрацию понятий глобального и локального максимума (минимума) (рис.2.11). Графиком функции двух переменных ![]() является некоторая поверхность в трехмерном пространстве. Точка
является некоторая поверхность в трехмерном пространстве. Точка ![]() есть точка глобального максимума,
есть точка глобального максимума, ![]() ,
, ![]() ,
, ![]() – точки локального максимума этой функции.
– точки локального максимума этой функции.
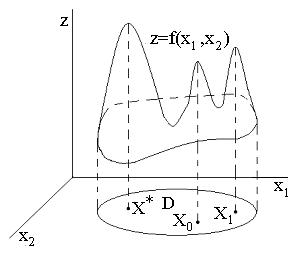
Рис. 2.11. Иллюстрация понятий глобального и локального максимума
Основные отличия нелинейной оптимизации от линейной оптимизации для задачи с двумя переменными (![]() ) приведены в табл. 2.6.
) приведены в табл. 2.6.
Таблица 2.6
Задачи линейной оптимизации | Задачи нелинейной оптимизации | |
Вид допустимой области | Выпуклый многоугольник | Произвольная |
Расположение допустимой области | I квадрант | На всей плоскости |
Точка экстремума | Совпадает с вершиной области | Внутри или на границе области |
Задачи нелинейной оптимизации с двумя переменными в принципе могут быть решены графическим методом.
Пример 2.7. Требуется найти оптимальное решение следующей задачи

при ограничениях
 .
.
Графическое решение показано на рис. 2.12.
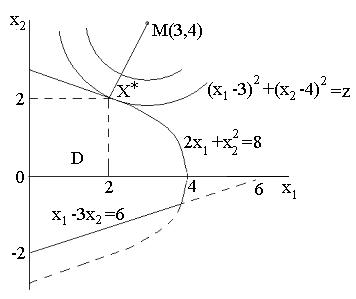
Рис. 2.12. Графическое решение примера 2.7
На основе неравенств системы ограничений строится допустимая область ![]() . Линии уровня целевой функции есть окружности с центром в точке
. Линии уровня целевой функции есть окружности с центром в точке  . Окружность минимального радиуса, имеющая общие точки с областью, касается граничной линии (параболы
. Окружность минимального радиуса, имеющая общие точки с областью, касается граничной линии (параболы ![]() ) в точке
) в точке ![]() . Эта точка и является оптимальным решением задачи минимизации, при этом
. Эта точка и является оптимальным решением задачи минимизации, при этом ![]() .
.
Координаты оптимальной точки можно определить из условия коллинеарности нормальных векторов к окружности и параболе. Проекции нормалей на оси координат равны частным производным от соответствующих функций, то есть  и
и  . Здесь
. Здесь  ,
,  . Поэтому
. Поэтому  ,
,  . Из условия коллинеарности следует, что эти проекции должны быть пропорциональны
. Из условия коллинеарности следует, что эти проекции должны быть пропорциональны  . Решая систему уравнений
. Решая систему уравнений
 ,
,
получим оптимальное решение задачи.
2.5. Модели и методы выпуклого программирования
2.5.1. Выпуклые и вогнутые функции и их свойства
Вспомним сначала определение выпуклых и вогнутых функций одной переменной. Функция  называется выпуклой на некотором промежутке, если для любых двух точек из этого промежутка выполняется неравенство:
называется выпуклой на некотором промежутке, если для любых двух точек из этого промежутка выполняется неравенство:

для любого  ,
,  (и вогнутой, если выполняется неравенство противоположного смысла).
(и вогнутой, если выполняется неравенство противоположного смысла).
Геометрически (рис.2.13) выпуклость функции означает, что хорда, соединяющая любые две точки графика функции, лежит выше соответствующей дуги кривой (для вогнутой функции (рис.2.14), наоборот, хорда лежит под соответствующим участком кривой).
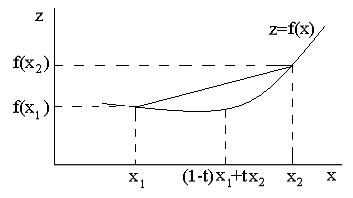
Рис. 2.13. График выпуклой функции одной переменной
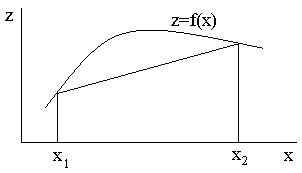
Рис. 2.14. График вогнутой функции одной переменной
Необходимым и достаточным условием выпуклости (вогнутости) дважды дифференцируемой функции ![]() одной переменной служит, как известно, неравенство
одной переменной служит, как известно, неравенство ![]() (
(![]() ).
).
Эти определения обобщаются на функции нескольких переменных  , заданных в выпуклой области
, заданных в выпуклой области ![]()
![]() -мерного векторного пространства. Пусть
-мерного векторного пространства. Пусть ![]() и
и ![]() – две любые точки области
– две любые точки области ![]() , тогда в силу выпуклости отрезок, соединяющий эти точки, целиком лежит в области
, тогда в силу выпуклости отрезок, соединяющий эти точки, целиком лежит в области ![]() . Это означает, что при любом , , точка
. Это означает, что при любом , , точка  принадлежит области определения функции
принадлежит области определения функции ![]() , и когда пераметр
, и когда пераметр ![]() меняется от 0 до 1, точка
меняется от 0 до 1, точка ![]() пробегает отрезок от точки
пробегает отрезок от точки ![]() до точки
до точки ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
