

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
|
|
|
|
|
|
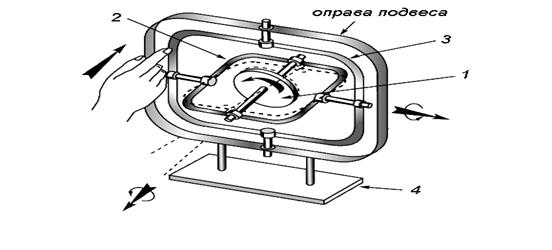
Рис.1. Гироскоп в кардановом подвесе:
1 – ротор гироскопа; 2 – внутренняя рамка гироскопа; 3 – наружная рамка гироскопа; 4 – подставка; Wy – собственная угловая скорость вращения ротора гироскопа; wx - вектор переносной угловой скорости.
3.8 Математическая модель гироскопического датчика
Для рассмотрения математической модели гироскопа обратимся к рис.2. Положение ротора относительно подставки (оси xhz) определяется тремя углами a, b и g, которые получаются при последовательных поворотах гироскопа и отклонении его собственных осей x, y и z от осей неподвижного основания.
Согласно рисунку H – кинетический момент гироскопа; Jx и Jy – моменты инерции ротора гироскопа относительно осей x и y.
Рис.2. Маховик с тремя степенями свободы – гироскоп
Уравнения движения гироскопа согласно принципу Д’Аламбера имеют вид
 (1)
(1)
где ![]() и
и ![]() – внешние моменты, действующие вокруг осей x и y (моменты от сил сопротивления трения в осях корданова подвеса, момент от силы тяжести, моменты, накладываемые на гироскоп специальными коррекционными устройствами и т. д.).
– внешние моменты, действующие вокруг осей x и y (моменты от сил сопротивления трения в осях корданова подвеса, момент от силы тяжести, моменты, накладываемые на гироскоп специальными коррекционными устройствами и т. д.).
Уравнения (1) можно переписать так:
 (2)
(2)
где  и
и  - полное инерционное сопротивление, развиваемое гироскопом при действии на него внешних моментов
- полное инерционное сопротивление, развиваемое гироскопом при действии на него внешних моментов ![]() и
и ![]() .
.
В теоретической механике при изучении законов движения гироскопа различают свободное и вынужденное движение гироскопа; свободное движение гироскопа, называемое нутацией, представляет собой движение по инерции, когда моменты внешних сил не действуют на гироскоп. Движение гироскопа, нагруженного моментом внешних сил, представляет собой совокупность вынужденного и свободного движения. Вынужденное движение гироскопа называется прецессией.
Закон нутационного движения можно получить, приняв в уравнениях (2) ![]() =
=![]() =0.
=0.
Тогда
 (3)
(3)
Решая систему уравнений (3) получаем дифференциальные уравнения, описывающие нутационное движение гироскопа.
 (4)
(4)
Закон прецессии гироскопа можно получить из уравнений (2), если пренебречь инерционными моментами  и
и  по сравнению с гироскопическими моментами
по сравнению с гироскопическими моментами ![]() и
и ![]() . Тогда имеем
. Тогда имеем
 (5)
(5)
Наиболее важными бортовыми гироскопическими приборами являются авиагоризонты, указатели поворота, гирополукомпасы, а также выключатели коррекции.
3.9 Авиагоризонты
В настоящее время применяются авиагоризонты типа АГК-47Б, АГБ-2, АГБ-3, АГР-72, АГР-144 и дистанционные авиагоризонты типа АГД-1. Авиагоризонт АГД-1 (рис.3) является наиболее распространенным.
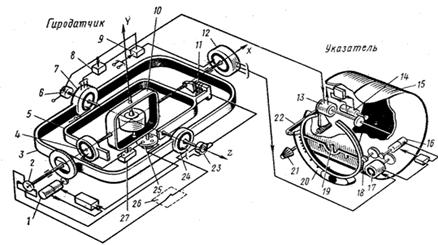
Рис.3. Кинематическая схема авиагоризонта АГД-1:
1, 14, 16-двигатель-генератор; 2, 5, 23-коммутаторы; 3, 5, 10 - рамки; 4, 24 — электродвигатели; 7, 12, 13, 17 — сельсины; 8, 9 — реле; 11 — индуктивный датчик; 15 — катушка; IS — шестерня; 19, 22 — индексы; 20 — шкала; 21 — кремальера; 25 - жидкостной маятниковый переключатель; 26 — контакты выключателя коррекции; 27 — жидкостной выключатель
Благодаря тому, что система индикации авиагоризонта АГД-1 связана с гироскопом электрически, индикация продольных углов самолета получается естественной: верхняя часть шкалы углов тангажа указателя окрашена в голубой цвет, а нижняя — в коричневый. Пилот видит на авиагоризонте взаимное расположение самолета, земли и неба таким, каким оно является в действительности.
Расположение гироагрегата авиагоризонта АГД-1 вблизи центра масс летательного аппарата обеспечивает хорошую устойчивость и точность гировертикали.
При включении авиагоризонта АГД-1 загорается сигнальная лампа на лицевой стороне прибора, которая должна погаснуть не позже чем через 15 с. Через 1—1,5 мин после включения авиагоризонт должен правильно показывать стояночные углы тангажа и крена самолета.
Следует помнить, что при взлете гировертикаль авиагоризонта АГД-1 накапливает погрешность выдачи сигналов тангажа со скоростью до 1° за кажую минуту взлета. После разворота летательного аппарата на 90° эта погрешность по углу тангажа переходит в погрешность по углу крена.
При разворотах летательного аппарата коррекция авиагоризонта (от маятникового переключателя) отключается по сигналам от выключателя коррекции.
В полете необходимо периодически контролировать правильность работы авиагоризонта по дублирующему авиагоризонту и другим пилотажным приборам. Контроль показаний углов крена ведется по указателю скольжения и указателю поворота (если крен отсутствует, то шарик указателя скольжения находится в центре и стрелка указателя поворота — на нулевом делении шкалы). Правильность показаний углов тангажа контролируется по вариометру, указателю скорости и высоты полета.
При неправильных показаниях авиагоризонта необходимо установить режим прямолинейного горизонтального полета по дублирующим приборам и кратковременно нажать кнопку автоматического арретирования. Арретир устанавливает плоскость следящей рамки параллельно основанию гироагрегата, а главную ось гироскопа нормально к этому основанию.
После окончания процесса арретирования происходит автоматическое арретирование гироскопа. Если через 15 секунд авиагоризонт не будет давать правильных показаний, его следует выключить и дальнейшее пилотирование, производить по дублирующим приборам.
Пользоваться кнопкой арретирования при углах тангажа более ±4° нельзя, так как иначе после арретирования будет выключена продольная коррекция гироскопа.
3.10 Центральные гировертикали (ЦГВ)
Для обеспечения сигналами углов крена и тангажа бортовых потребителей используются единые гироскопические датчики или система таких датчиков центральных гировертикалей. На измерительных осях датчиков устанавливается по нескольку потенциометров или сельсинов.
Для повышения точности показаний углов крена и тангажа в центральной гировертикали применена силовая гироскопическая стабилизация (рис.4).
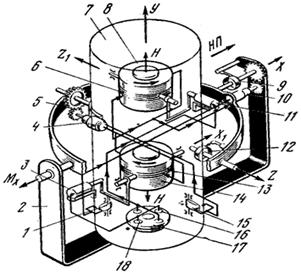
Рис.4. Кинематическая схема центральной гировертикали:
1, 15 — маятники; 2 — корпус; 3, 4, 10, 11 — электродвигатели; 5 — рамка; 6, 9, 12, 13 — потенциометры; 7 — платформа; 8, 14 — гироскопы; 16, 18 — контакты; 17 — маятник.
Наличие силовой компенсации внешних моментов не устраняет кажущегося ухода гировертикали в результате вращения Земли. Устранение влияния вращения Земли обеспечивается системой коррекции, состоящей из жидкостного маятника и коррекционных двигателей.
При запуске ЦГВ платформа с гироскопами может находиться в любом положении. Для быстрого установления ее в положение вертикали служат механические маятники, цепи которых замыкаются через контакты кнопки, расположенной на приборной доске. Если платформа будет наклонена на угол более 1,5—2°, то маятники, расположенные на карданной раме, замыкают свои комплекты, подавая полное напряжение на электродвигатели. Эти электродвигатели устанавливают платформу вертикально с точностью 1,5—3°, после чего размыкают свои контакты. Более точное установление платформы по вертикали осуществляется с помощью жидкостного маятника и коррекционных электродвигателей.
Если ось (стрелка на корпусе) ЦГВ установлена точно параллельно продольной оси летательного аппарата, то карданные погрешности гироузла отсутствуют.
Погрешности, вызываемые ускорениями летательного аппарата, уменьшаются выключением продольной коррекции на виражах и продольной коррекции — при наличии продольных ускорений.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
